(Л
С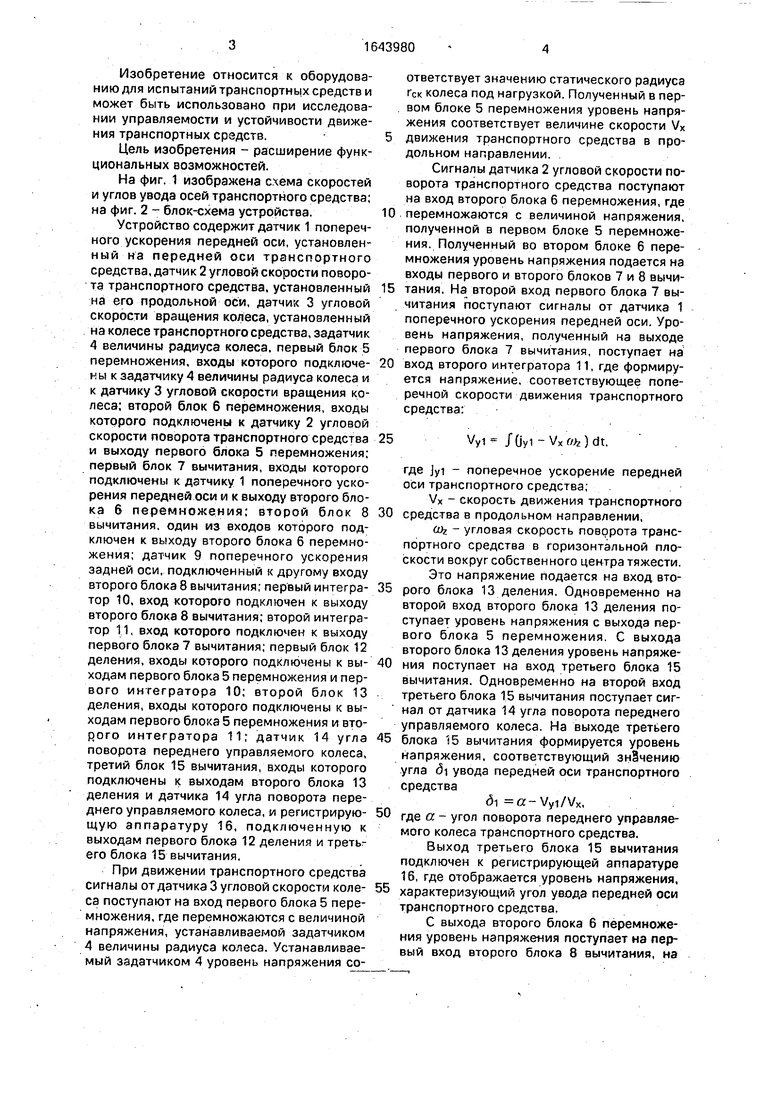

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения параметров движителей транспортного средства | 1989 |
|
SU1735733A1 |
| Устройство для исследования управляемости и устойчивости движения транспортного средства | 1989 |
|
SU1711016A1 |
| Способ управления антиблокировочной системой, противобуксовочной системой и системой курсовой устойчивости транспортного средства и устройство для его осуществления | 2020 |
|
RU2751471C1 |
| Способ испытания движителей и устройство для его осуществления | 1985 |
|
SU1332175A1 |
| Устройство для контроля за взаимодействием движителей транспортного средства с дорогой | 1989 |
|
SU1691706A1 |
| Устройство для управления задними колесами транспортного средства | 1989 |
|
SU1625756A1 |
| Система торможения транспортного средства | 1986 |
|
SU1526570A3 |
| Механическая трансмиссия с системой автоматического управления распределением крутящих моментов между колесами автотранспортного средства (4к4) с отключаемым приводом одного из ведущих мостов | 2019 |
|
RU2706681C1 |
| УСТРОЙСТВО ОГРАНИЧЕНИЯ СКОРОСТИ АВТОМОБИЛЯ В ЗАВИСИМОСТИ ОТ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК И ЖЕСТКОСТИ ДОРОЖНОГО ПОКРЫТИЯ В БОКОВОМ ДВИЖЕНИИ | 2005 |
|
RU2285626C1 |
| ПРИВОДНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2421354C2 |
Изобретение относится к оборудованию для испытаний транспортных средств и может быть использовано при исследовании управляемости и устойчивости движения транспортных средств. Цель изобретения - расширение функциональных возможностей. Устройство содержит датчик 1 поперечного ускорения передней оси, датчик 2 угловой скорости поворота транспортного средства, датчик 3 угловой скорости вращения колеса, задатчик 4 величины радиуса колеса, схему обработки сигналов датчиков и регистрирующую аппаратуру. При движении транспортного средства устройство определяет углы увода передней и задней осей транспортного средства. 2 ил.
ON
Јь
СА Ю 00 О
Изобретение относится к оборудованию для испытаний транспортных средств и может быть использовано при исследовании управляемости и устойчивости движения транспортных средств.
Цель изобретения - расширение функциональных возможностей.
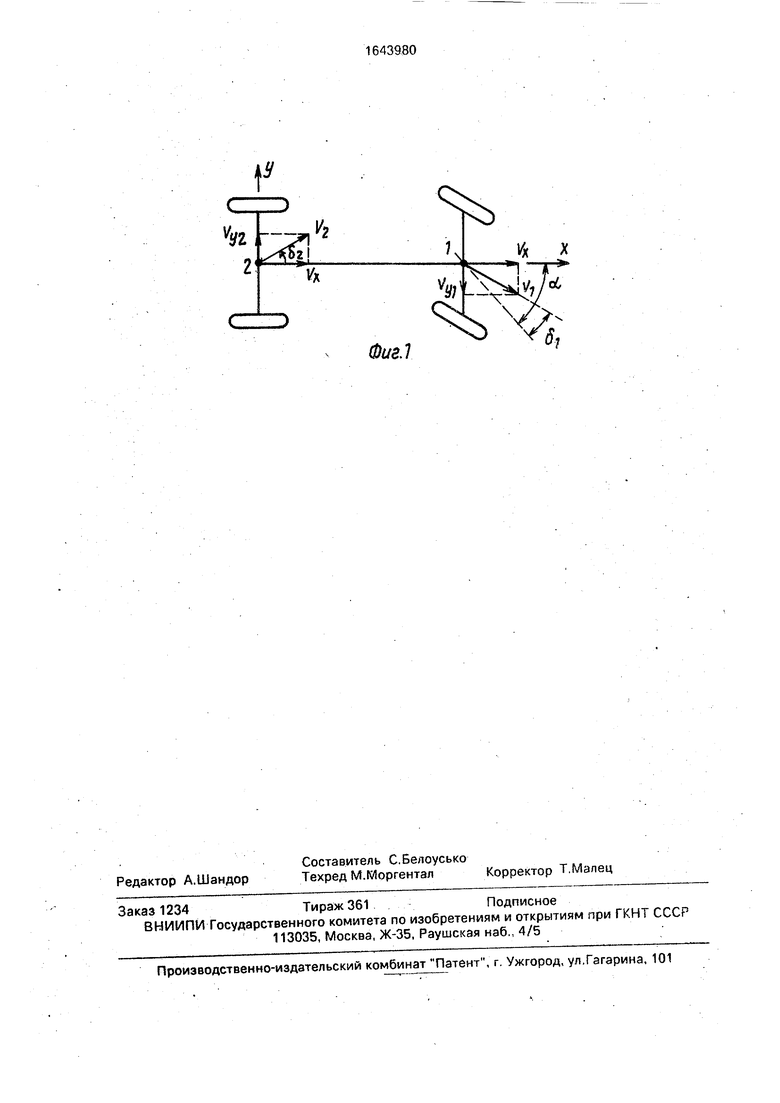
На фиг. 1 изображена схема скоростей и углов увода осей транспортного средства; на фиг. 2 - блок-схема устройства.
Устройство содержит датчик 1 поперечного ускорения передней оси, установленный на передней оси транспортного средства, датчик 2 угловой скорости поворота транспортного средства, установленный на его продольной оси, датчик 3 угловой скорости вращения колеса, установленный на колесе транспортного средства, задатчик 4 величины радиуса колеса, первый блок 5 перемножения, входы которого подключены к задатчику 4 величины радиуса колеса и к датчику 3 угловой скорости вращения колеса; второй блок 6 перемножения, входы которого подключены к датчику 2 угловой скорости поворота транспортного средства и выходу первого блока 5 перемножения; первый блок 7 вычитания, входы которого подключены к датчику 1 поперечного ускорения передней оси и к выходу второго блока 6 перемножения: второй блок 8 вычитания, один из входов которого подключен к выходу второго блока 6 перемножения; датчик 9 поперечного ускорения задней оси, подключенный к другому входу второго блока 8 вычитания; первый интегратор 10, вход которого подключен к выходу второго блока 8 вычитания; второй интегратор 11, вход которого подключен к выходу первого блока 1 вычитания; первый блок 12 деления, входы которого подключены к выходам первого блока 5 перемножения и пер- вого интегратора 10; второй блок 13 деления, входы которого подключены к выходам первого блока 5 перемножения и второго интегратора 11; датчик 14 угла поворота переднего управляемого колеса, третий блок 15 вычитания, входы которого подключены к выходам второго блока 13 деления и датчика 14 угла поворота переднего управляемого колеса, и регистрирующую аппаратуру 16, подключенную к выходам первого блока 12 деления и третьего блока 15 вычитания,
При движении транспортного средства сигналы отдатчика 3 угловой скорости колеса поступают на вход первого блока 5 перемножения, где перемножаются с величиной напряжения, устанавливаемой задатчиком 4 величины радиуса колеса. Устанавливаемый задатчиком 4 уровень напряжения соответствует значению статического радиуса колеса под нагрузкой. Полученный в первом блоке 5 перемножения уровень напряжения соответствует величине скорости Vx
движения транспортного средства в продольном направлении.
Сигналы датчика 2 угловой скорости поворота транспортного средства поступают на вход второго блока 6 перемножения, где
перемножаются с величиной напряжения, полученной в первом блоке 5 перемножения. Полученный во втором блоке 6 перемножения уровень напряжения подается на входы первого и второго блоков 7 и 8 вычитания. На второй вход первого блока 7 вычитания поступают сигналы от датчика 1 поперечного ускорения передней оси. Уровень напряжения, полученный на выходе первого блока 7 вычитания, поступает на
вход второго интегратора 11, где формируется напряжение, соответствующее поперечной скорости движения транспортного средства:
25
Vy1 /Оу1 VxMz)dt,
где jyi - поперечное ускорение передней оси транспортного средства;
Vx - скорость движения транспортного
средства в продольном направлении,
аь - угловая скорость поворота транспортного средства в горизонтальной плоскости вокруг собственного центра тяжести. Это напряжение подается на вход второго блока 13 деления. Одновременно на второй вход второго блока 13 деления поступает уровень напряжения с выхода первого блока 5 перемножения. С выхода второго блока 13 деления уровень напряжения поступает на вход третьего блока 15 вычитания. Одновременно на второй вход третьего блока 15 вычитания поступает сигнал отдатчика 14 угла поворота переднего управляемого колеса. На выходе третьего
блока 15 вычитания формируется уровень напряжения, соответствующий знЗчению угла д увода передней оси транспортного средства
5i a-Vyi/Vx.
где а - угол поворота переднего управляемого колеса транспортного средства.
Выход третьего блока 15 вычитания подключен к регистрирующей аппаратуре 16, где отображается уровень напряжения,
характеризующий угол увода передней оси транспортного средства.
С выхода второго блока 6 перемножения уровень напряжения поступает на первый вход второго блока 8 вычитания, на
второй вход которого поступает сигнал с датчика 9 поперечного ускорения задней оси. Уровень напряжения с выхода второго блока 8 вычитания поступает на вход первого интегратора 10, где формируется напряжение, соответствующее поперечной скорости Vy2 движения задней оси транспортного средства
Vy2 / (Vx Oh jy2) dt,
где jy2 - поперечное ускорение задней оси транспортного средства.
Это напряжение поступает на первый вход первого блока 12 деления, на второй вход которого поступает уровень напряжения, полученный на выходе первого блока 5 перемножения. 8 результате деления на выходе первого блока 12 деления формируется величина напряжения, соответствующая значению угла 62 увода задней оси транспортного средства
U Vy2/Vx.
С выхода первого блока 12 деления сигнал поступает в регистрирующую аппаратуру, где фиксируется уровень напряжения, соответствующий углу увода задней оси транспортного средства.
Таким образом, устройство позволяет измерять углы увода как задней, так и передней осей транспортного средства, а также производить измерения углов увода при любой скорости движения транспортного средства, на кривых произвольного радиуса и с любым возмущением, прикладываемым к транспортному средству, что расширяет функциональные возможности устройства и способствует повышению точности и достоверности результатов, получаемых при исследованиях управляемости и устойчивости движения транспортных средств.
Формула изобретения Устройство для исследования управляемости и устойчивости движения транспортного средства, содержащее датчик поперечного ускорения задней оси транспортного средства, датчик угловой скорости поворота транспортного средства, первый
интегратор, два блока деления, первый блок умножения и регистрирующую аппаратуру, отличающееся тем что, с целью расширения функциональных возможностей, оно снабжено датчиком поперечного
ускорения передней оси транспортного средства, датчиком угловой скорости вращения колеса транспортного средства, дат- чиком угла поворота переднего управляемого колеса транспортного средства, задатчиком величины радиуса колеса, вторым интегратором, вторым блоком умножения и тремя блоками вычитания, при этом за датчик величины радиуса колеса и датчик угловой скорости вращения колеса подключены к входам первого блока перемножения, датчик угловой скорости поворота транспортного средства и выход первого блока перемножения подключены к входам второго блока перемножения, датчик поперечного ускорения передней оси и выход второго блока перемножения подключены к входам первого блока вычитания, датчик поперечного ускорения задней оси и выход второго блока перемножения подключены к
входам второго блока вычитания, выход которого подключен к входу первого интегратора, выход первого блока вычитания подключен к входу второго интегратора, выход первого блока перемножения и выход
первого интегратора подключены к входам первого блока деления, выход которого подключен к регистрирующей аппаратуре, выход первого блока перемножения и выход второго интегратора подключены к входам
второго блока деления, а выход датчика угла поворота переднего управляемого колеса и выход второго блока деления подключены к входам третьего блока вычитания, выход которого подключен к регистрирующей аппаратуре.
f
| Способ испытания движителей и устройство для его осуществления | 1985 |
|
SU1332175A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
