Wt.f
Изобретение относится к автоматике и вычислительной технике и может быть использовано для экстремального управления и моделирования экстремальных систем.
Известен класс экстремальных объектов управления, у которых максимум амплитудно-частотной характеристики при воздействии внешних возмущений не совпадает с экстремальным объемом, обес- печивающим его максимальную производительность. Для удержания режима максимальной производительности используются автоматические самонастраивающиеся беспоисковые системы с искусственно создаваемой разностной функцией управления.
Известны системы, в которых функцию управления формируют с помощью двух полосовых растроенных фильтров путем подстройки параметров одного из них 1.
Однако такие системы могут быть использованы лишь в случаях, когда заранее известно неизменное положение ЭКСТре- Мума. . ; Л- - .-. --. .. / :., .: . .
Наиболее близким по техническому решению к предлагаемой являются системы, в которых функция управления формируется с помощью нескольких вычислительных устройств, что позволяет находить и удерживать априорно неизвестное значение экстремума, дрейф которого определяется характеристическим параметром системы - степенью затухания 2J.
Недостатки таких систем-неоправданно сложное их конструктивное выполнение, введение дополнительного стабилизатора амплитуды гармонических колебаний и ограниченное применение для отдельных типов объектов управления.
Целью изобретения является упрощения системы для объектов управлений с передаточной функцией Wo(p) Ко/(р Т2 + +21 рТ +1) и неизменными параметрами Ко и Т без снижения точности в условиях нестабильности амплитуды генератора.
Цель достигается тем, что в беепоиско- вую экстремальную систему управления, содержащую соединенные в кольцо интегратор, генератор гармонических колебаний, преобразователь частоты о) в напряжение Ui по закону Ui -- Ki о) и блок сравнения, а также объект управления с экстремальной характеристикой I WoOft l .дрейфующей по оси частот при изменении его степени затухания Ј, подключенный к выходу генератора гармонических Колебаний, вводятся два фиксатора амплитуд и функциональный преобразователь, причем первый вход функционального преобразователя через первый фиксатор амплитуд подключен к выходу генератора гармонических колебаний, второй вход функционального преобразователя через второй фиксатор амплитуд подключен к вц- ходу объекта, а выход функционального преобразователя, на котором формируется напряжение
«г
U2 K2 V(B2-Bo2)/B2 .
где В - амплитуда выходного сигнала объекта;
Во-КоА;
А-амплитуда сигнала генератора;
К2 - коэффициент, выбираемый из условия Кг Ki/T,
соединен с вторым входом блока сравнения.
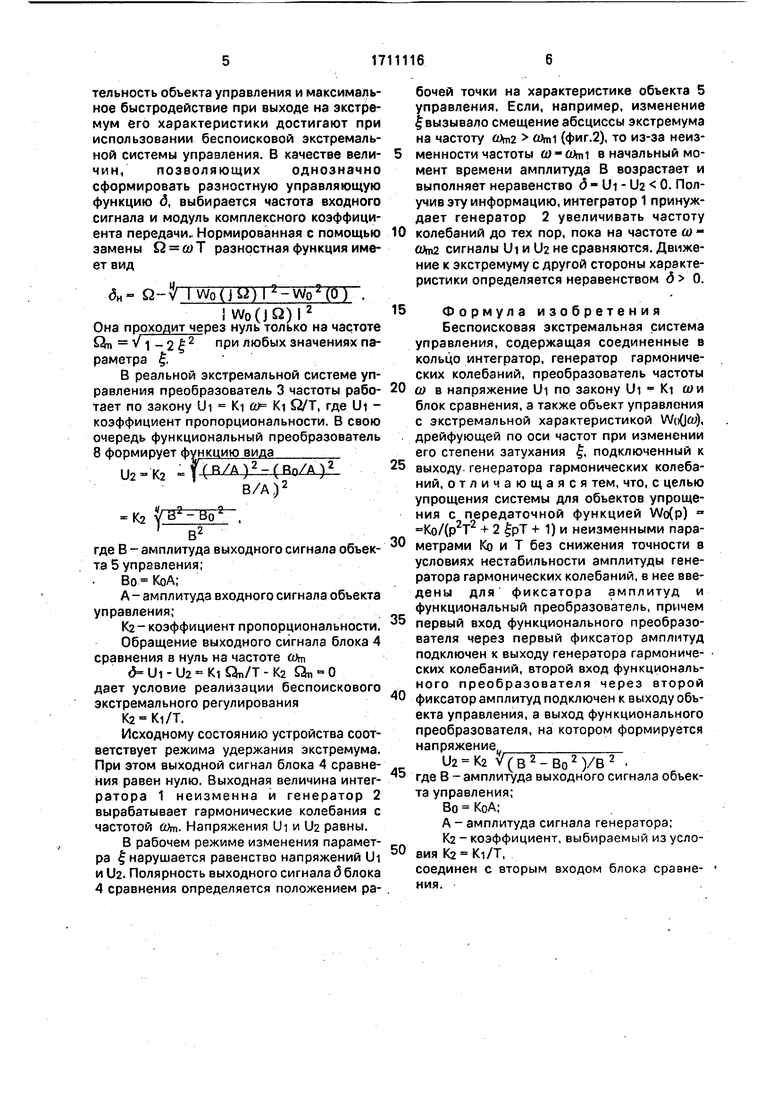
На фиг.1 изображена функциональная
схема системы; на фиг,2 - возможные виды экстремальных характеристик объекта управления.
Беспоисковая экстремальная система управления содержит интегратор 1, генератор 2 гармонических колебаний, преобразователь 3 частоты ш,- блок 4 сравнения, объект 5 управления, фиксаторы 6 и 7 амплитуд гармонических сигналов соответственно на входе и выходе объекта
управления, а также функциональный преобразователь 8, При этом фиксаторы амплитуд гармонических сигналов могут строится, например, на базе амплитудного детектора, шунтируемого оптроном в качестве управляющего сопротивления. Функциональный преобразователь строится по известным принципам аналоговой техники, например, на базе операционного усилителя с нелий- нейными обратными связями, реализующего заданную функцию преобразования.
Объект управления описывается передаточной функцией
WotpJ-Mp -b lpT+l), .
где Ко - коэффициент передачи по постоян- ной составляющей;
Т - постоянная времени;
Ј - степень затухания.
Если параметры Ко и Т неизменны, то | меняется и играет роль внешнего возмуще- ния. Возможный диапазон изменения Ј определяется неравенством
V2/2.
Амплитудно-частотная характеристика объекта управления при этом имеет вид
1 WoOft)Ny V(i-w2T2)2+4$2a 2T2
- . . .
а ее максимум приходится на частоту tOm Vl -2|-2 /Т. Максимальная производительность объекта управления и максимальное быстродействие при выходе на экстремум его характеристики достигают при использовании беспоисковой экстремальной системы управления. В качестве величин, позволяющих однозначно сформировать разностную управляющую функцию д, выбирается частота входного сигнала и модуль комплексного коэффициента передачи. Нормированная с помощью замены R (О Т разностная функция имеет вид
5н- О-ft I Wo(j)|2-Wo2(0) .
SWo(jQ)l2 :
Она проходит через нуль только: на частоте On - V1 -2 Ј2 при любых значениях параметра .
В реальной экстремальной системе управления преобразователь 3 частоты работает по закону 01 - Ki (0 Kt О/Т, где Ui коэффициент пропорциональности. В свою очередь функциональный преобразователь 8 формирует функцию вида
U,,: pBA)2-(Ro/A)2 В/А)2
-Кг у
Uп
/ и
В5
В2-.
где В - амплитуда выходного сигнала объекта 5 управления; ... ; Во-КоА;
А- амплитуда входного сигнала объекта управления;
«2-коэффициент пропорциональности.
Обращение выходного сигнала блока 4 сравнения в нуль на частоте (От
5- Ui - U2 - Ki &п/Т - К2 On - О дает условие реализации беспоискового экстремального регулирования
Kz-Kt/T.
Исходному состоянию устройства соответствует режима удержания экстремума. При этом выходной сигнал блока 4 сравнения равен нулю. Выходная величина интегратора 1 неизменна и генератор 2 вырабатывает гармонические колебания с частотой (От. Напряжения Ui и U2 равны.
В рабочем режиме изменения параметра Ј нарушается равенство напряжений Ui и Uz. Полярность выходного сигнала д блока 4 сравнения определяется положением рабочей точки на характеристике объекта 5 управления. Если, например, изменение Ј вызывало смещение абсциссы экстремума на частоту оьз оми (фиг.2), то из-за неизменности частоты ш-оы в начальный момент времени амплитуда В возрастает и выполняет неравенство дт Ui - Uz 0. Получив эту информацию, интегратор 1 принуждает генератор 2 увеличивать частоту
колебаний до тех пор, пока на частоте СУ - Одп2 сигналы Ui и U2 не сравняются. Движение к экстремуму с другой стороны характеристики определяется неравенством д 0.
Формула изобретения
Беспоисковая экстремальная система управления, содержащая соединенные в кольцо интегратор, генератор гармонических колебаний, преобразователь частоты
о) в напряжение Ui по закону UV- Ki блок сравнения, а также объект управления с экстремальной характеристикой WoOfti), дрейфующей по оси частот При изменении его степени затухания Ј, подключенный к
выходу- генератора гармонических колебаний, отличающаяся тем, что, с целью упрощения системы для объектов упрощения с передаточной функцией Wo(p) n Ко/(р2Т2 -+ 2 fpT. + .i) и неизменными параметрами Ко и Т без снижения точности в условиях нестабильности амплитуды генератора гармонических колебаний, в нее вве- дены для фиксатора амплитуд и функциональный преобразователь, причем
первый вход функционального преобразователя через первый фиксатор амплитуд подключен к выходу генератора гармонических колебаний, второй вход функционального преобразователя через второй
фиксатор амплитуд подключен к выходу объекта управления, а выход функционального преобразователя, на котором формируется напряжение
U2- К2 V(B2-B02)/B2 - где В - амплитуда выходного сигнала объекта управления;
А-амплитуда сигнала генератора; К2 - коэффициент, выбираемый из усло- вия K2 Ki/T,
соединен с вторым входом блока сравне- ния..
vM
о
Vmi ®тг Фиг.2
to
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ АВТОКОЛЕБАТЕЛЬНЫХ САМОНАСТРАИВАЮЩИХСЯ СИСТЕМ | 1992 |
|
RU2032925C1 |
| Устройство для измерения малых изменений частоты | 1990 |
|
SU1756829A1 |
| Устройство для управления амплитудой виброперемещений | 1980 |
|
SU922677A1 |
| Устройство для регулирования колебаний виброплощадки | 1981 |
|
SU987597A1 |
| Устройство для регулирования частоты колебаний платформы | 1978 |
|
SU752254A1 |
| Устройство управления впрыском топлива | 1980 |
|
SU877105A1 |
| Устройство для управления неустойчивым экстремальным объектом | 1982 |
|
SU1034015A1 |
| Устройство для контроля деградации МДП-структур | 1990 |
|
SU1783454A1 |
| Многоканальная система экстремальногоРЕгулиРОВАНия | 1979 |
|
SU824141A1 |
| Система управления | 1981 |
|
SU996995A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано для экстремального управления и моделирования экстремальных систем. Целью изобретения является упрощение системы для объекта управления с передаточной функцией Wo(p) Ко/(р2Т2 + 2 Ј рТ + 1) и неизменными параметрами Ко и Т без снижения точности в условиях нестабильности амплитуды генератора гармонических колебаний, Система содержит соединенные в кольцо интегратор 1, генератор 2 гармонических колебаний, преобразователь 3 частоты со и блок 4 сравнения, а также объект 5 управления с экстремальной характеристикой 7W0Q to)/, два фиксатора 6 и 7 амплитуд гармонических сигналов, подключенных соответственно к входу и выходу объекта управления, и функциональный преобразователь 8. Режим удерживания экстремума определяется равенством сигналов Ui, U2 на входах блока сравнения и нулевом сигнале д на его выходе. В случае изменения параметра - степени затухания Ј, который при постоянстве коэффициента передачи Ко объекта по постоянной составляющей входного сигнала и постоянной времени Т играет роль внешнего возмущения, сигнал 6 становится отличным от нуля. В результате воздействия управляющего сигнала д О изменяется частота колебаний генератора до состояния, когда система возвращается К точке экстремума. 2 ил.
| Петров Б.Н | |||
| и др | |||
| Принцип построения и проектирования самонастраивающихся систем управления | |||
| - М.: Машиностроение, 1972, с | |||
| Гидравлическая или пневматическая передача | 0 |
|
SU208A1 |
| Рязанов Б.П | |||
| Способ беспоискового экстремального регулирования колебательного объекта второго порядка | |||
| - Известия .вузов | |||
| Приборостроение | |||
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
| XXVIH, №8, с | |||
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
