Изобретение относится к машиностроению и может быть использовано в гибких автоматизированных производствах для сборки изделий.
Целью изобретения является уменьшение габаритов за счет рационального расположения промышленных роботов в системе.
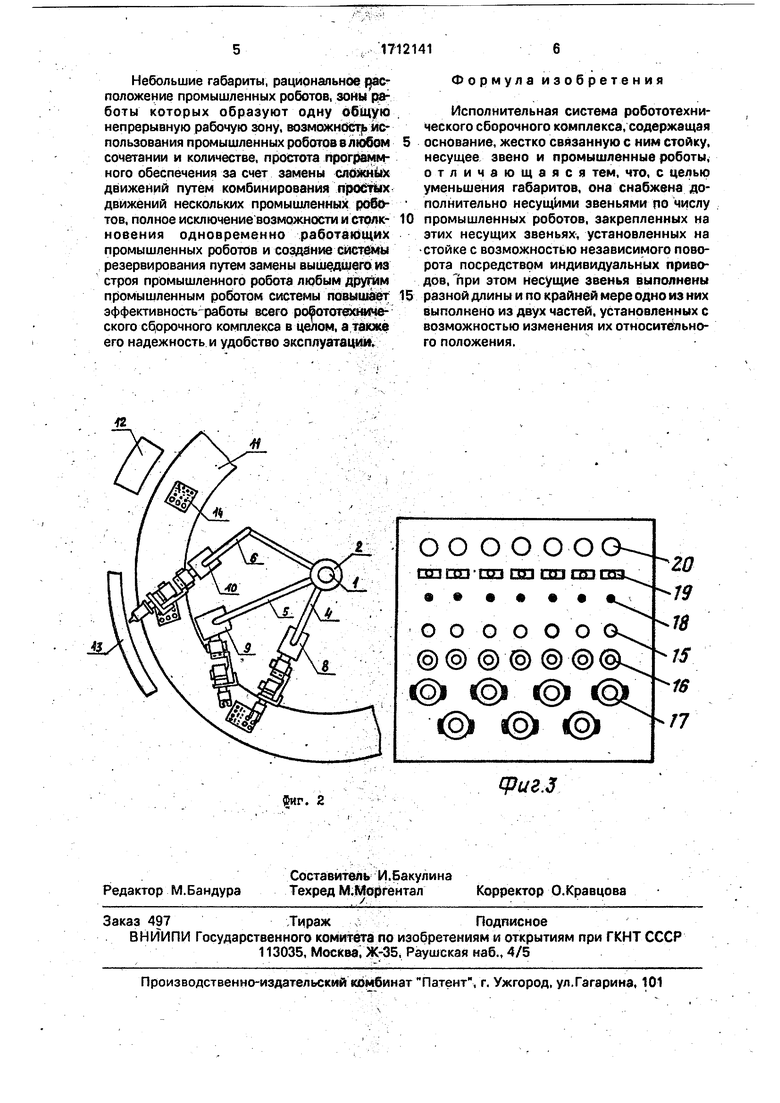
На фиг. 1 изображена исполнительная система робототехнического сборочного комплекса, общий вид (показан частный случай для исполнительной системы с tpeмя роботами); на фиг. 2 - робототехнический сборочный комплекс с использованием данной исполнительной системы, общий вид; на фиг. 3 - технологическая кассета, в которой происходит сборка шагового электродвигателя.
На общей стойке 1, жестко связанной с основанием, расположены три подвижных втулки 2, которые могут поворачиваться относительно стойки Т, каждая посредством индивидуального привода 3. Втулки 2 жестко связаны с несущими звеньями, например, кронштейнами 4,5 и 6. Несущие звенья (кронштейны) 4,5 и 6 имеют различную длину, причем наиболее длинный кронштейн 6 выполнен из двух частей, установленных с возможностью изменения их относительного положения посредством отдельного привода 7. На другом конце кронштейнов 4, 5 и 6 размещены три промышленных робота 8, 9 и 10 по одному на каждом.
Промышленные роботы 8, 9 и 10 расположены над сборочным столом 11, рядом со сборочным столом 11 размещены загрузочное устройство 12 технологических кассет, а также магазин сменного инструмента 13.
8кассете 14 расположены детали 15-20, предназначенные для сборки шагового электродвигателя.
Исполнительная система робототехнического комплекса работает в совокупности с технологическим оборудованием и системой управления (не показана). .
Исполнительная система робототехнического сборочного комплекса для сборки, например, шагового-электродвигателя (фиг. 2) работает .следующим образом. .
Исполнительная система на общей стойке 1 содержит, например(.три японских сборочных промышленных микроробота 8,
9и, 10 марки 88-5 фирмы Nakanlppon Electronic Gampany и расположена над сборочным столой 11, представляющим собой дискретно движущийся конвейер, распЬложенный на секторе с углом, равным максимальному углу поворота подвижных втулок
2, на которые жестко крепятся кронштейны 4, 5 и б с промышленными роботами.
Около конвейера находятся накопители с комплектующими деталями для сборки (здесь технологические кассеты). Магазин сменного инструмента 13, предназначенный для быстрой смены захватных устройств роботов, и система управления исполнительной системой (не показана).
Сборка шагового электродвигателя про: исходит следующим образом. На кониейер подаются технологические кассеты 14, заполненные деталями шагового электродвигателя, в которых и происходит сборка изделия. После сборки кассеты с готовыми изделиями убираются с конвейера и складываются и специально отведенном месте. Технологическая кассета, в которой подаются все комплектующие детали для сборки семи шаговых электродвигателей, показана на фиг. 3.
..Шаговый электродвигатель содержит шесть деталей: ротор 15, шайбу 16, CTatop 17, шарик 18, пружину 19 и крышку 20. Сборка происходит путем установления деталей в другие, а крышка 20 перед установкой в узел должна быть промазана клеем. ,л ;
Все три промышленных робота.8, 9 и 10 работают на одной кассете, где происходит сборка семи шаговых электродви1:ателей. Для захвата ротора, шайбы и крышки используется одно захватное устройство. Для захвата шарика и пружины используются два различных и отличных от первого захватные устройства. Для промазки крышки клеем используется устройство дозированной подачи клея. Все вспомогательные устройства размещают в магазине сменного инструмента. Промышленный робот 8 берет ротор 15 и устанавливает его в шайбу 16, а затем шайбу с ротором - в статор 17. Промышленный робот 9 берет шарик 18 и так;же устанавливает егов статор 17, а промышленный робот 10 ставит туда же пружину 19 Промышленный робот 8 берет крышку 20, а промышленный робот 9 меняет свое захватное устройство в магазине сменного инструмента 13 на устройство дозированной подачи клея. Промышленный робот 8 держит крышку 20 8 горизонтальном положении, а промышленный робот 9 наносит на нее клей и опять меняет устройство подачиклея на захватное устройство шарика, а промышленный робот 8 ставит .крышку в статор 17. Это один из возможных вариантов сборки шагового электродвигателя.
Небольшие габариты, рациональное | сположение промышленных роботов, зоны peEtботы которых образуют одну о6Щ)гю непрерывную рабочую зону, возможнй1 г|ь использования промышленных роботрв а любом сочетании и количестве, простота прог()аммного обеспечения за счет замены сложм||| х движений путем комбинирования npo fiMX движений нескольких промышленных роботов, полное исключение возможности и стрлкновения одновременно работагйщих промышленных роботов и создание систф4ы резервирования путем замены вышедшего из строя промышленного робота любым промышленным роботом системы повыша| эффективность-работы всего робототехйиче СКОРО строчного комплекса в целом, а его надежность и удобство эксплуатации.
Формула изобретения
Исполнительная система робототехнического сборочного комплекса, содержащая
основание, жестко связанную с ним стойку, несущее звено и промышленные роботы, отличающаяся тем, что, с целью уменьшения габаритов, она снабжена дополнительно несущими звеньями по числу
промышленных роботов, закрепленных на этих несущих звеньях, установленных на стойке с возможностью независимого поворота посредством индивидуальных приводов,при этом Несущие звенья выполнены
разной длин ы и по крайней мере одно из них выполнено из двух частей, установленных с возможностью изменения их относительного положения.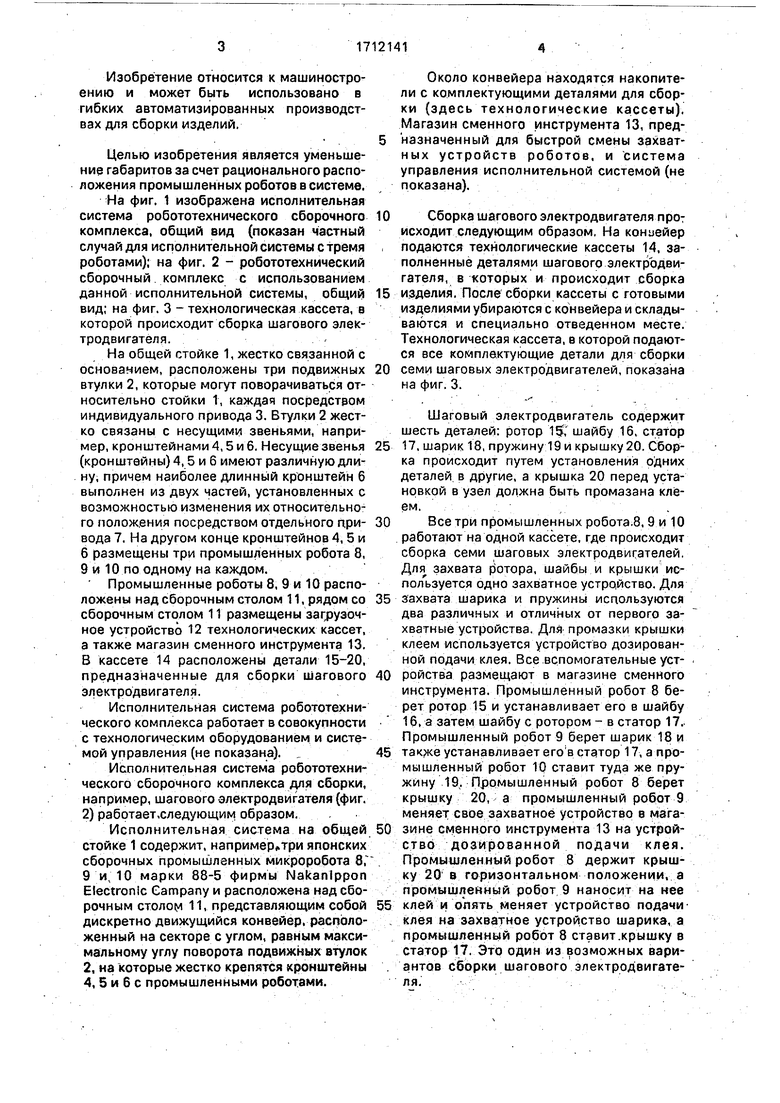
| название | год | авторы | номер документа |
|---|---|---|---|
| Робототехнический сборочно-сварочный комплекс | 1987 |
|
SU1537475A1 |
| Механизм забора из стопки робототехнического комплекса "Робот-швея" | 2024 |
|
RU2832763C1 |
| Робототехнический комплекс "Робот-швея" | 2024 |
|
RU2836073C1 |
| Робототехнический комплекс | 1987 |
|
SU1416244A1 |
| Робототехнический комплекс для штамповки деталей из штучных заготовок | 1987 |
|
SU1600895A1 |
| Загрузочное устройство для автоматических листообрабатывающих комплексов | 1985 |
|
SU1337175A1 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| КОНТРОЛЬНО-СОРТИРОВОЧНЫЙ КОМПЛЕКС | 1990 |
|
RU2023571C1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |

| Итоги науки и техники | |||
| - Сб.: Технология и оборудование механосборочного пройз* водства | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| М. | |||
| ВИНИТИ, 1982 | |||
| с,155-1б1, рис.63. | |||
