Изобретение относится к листовой штамповке и может быть использовано в робототехнических автоматических комплексах.
Цель изобретения - расширение технологических возможностей за счет увеличения емкости магазина и быстрой переналадки устройства для обработки разных весовых групп заготовок, а также повышение надежности работы устройства.
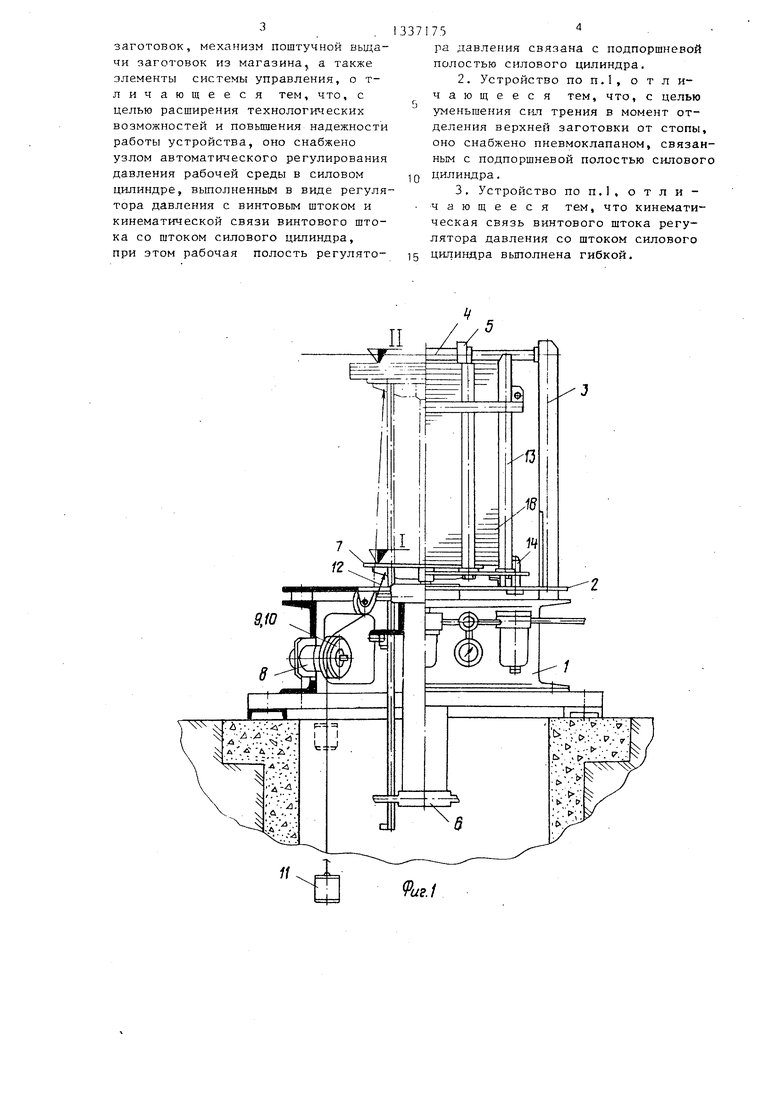
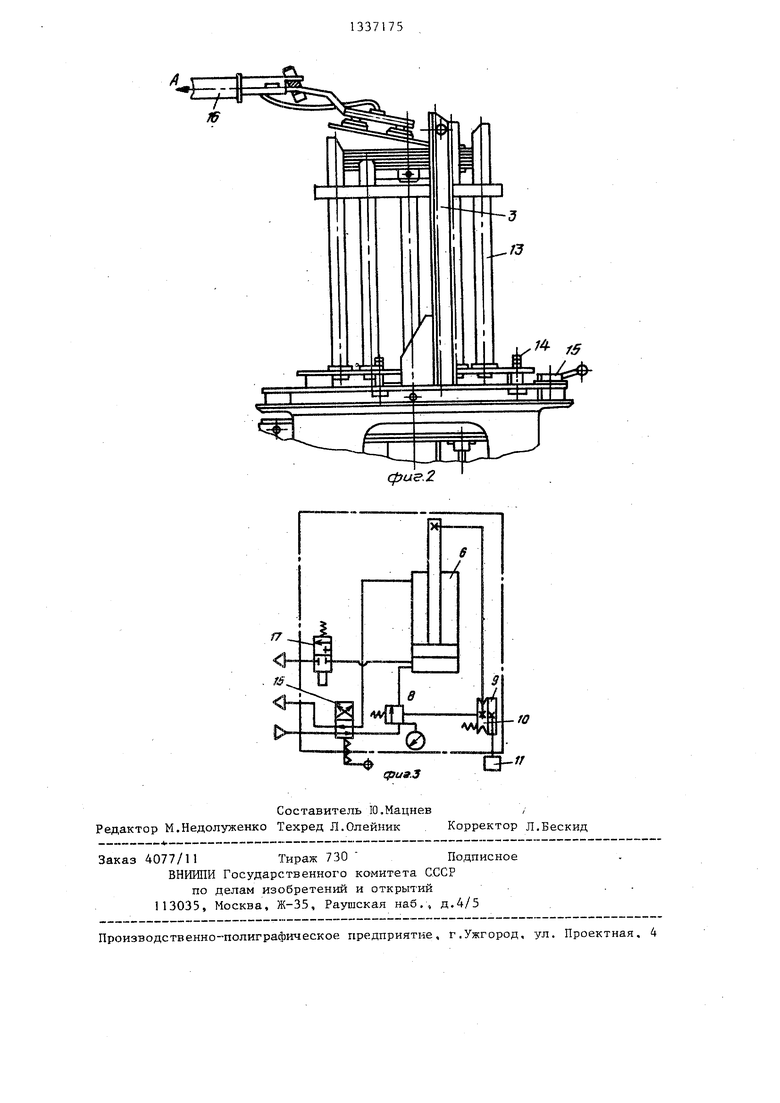
На фиг.1 изображено загрузочное устройство, вид спереди; на фиг.2 - то же, вид сбоку; на фиг.З - принципиальная пневматическая схема, устройства ,
Устройство состоит из основания 1 закрепленной на основании плиты 2 с неподвижно закрепленными на ней стойками 3, траверсы 4, подвижно установленной на опорах стойки 3, опорных роликов 5, закрепленных на траверсе 4 силового цилиндра 6, смонтированного на основании 1, подъемного стола 7, закрепленного на штоке силового .-цилиндра, регулятора 8 давления, закрепленного на основании 1 , грузового 9 и приводного шкивов 10, неподвижно посаженных на винтовой шток регулятора 8 давления, груза 11 на тросике, закрепленном к ободу шкив.а 9, тросика 12, прикрепленного одним концом к шкиву 10, а другим - к столу 7,- кассеты 13, центрирующих штырей 14, крана 15 управления, руки 16 робота с захватом, электромагнитного клапана 17 стопы заготовок 18.
Загрузочное устройство работает следующим образом.
В. начале этапа (период непрерьш- ной работы комплекса в автоматическом режиме) в состоянии готовности робототехнического автоматического комплекса загруженная заготовками 18 кассета 13 установлена на плите 2 и закреплена посредством штырей 14. Подъемный стол 7, находясь в нижнем положении, давит на стопу заготовок 18 с усилией, соответствующим давлению сжатого воздуха в пневмоцилинд- ре 6, а выталкиваемая стопа заготовок 18 упирается в ролики 3 траверс 4 с силой (избыточной), остающейся постоянной на протяжении зтапа. Гру 11 находится в нижнем положении.
В процессе рабо1 ы автоматического комплекса рука 16 робота посредством захватного органа берет верхний лист и приподнимает его край, одновременно по команде с пульта управления комплексом открывается электромагнитный клапан 17 и происходит сброс давления сжатого воздуха под поршнем пневмоцилиндра 6, а рука 16 робота, двигаясь по направлению стрелки А, извлекает из-под упорных роликов 5 заготовку. Таким образом, в течение этапа разгружается кассета 13. При этом с поднятием подъемного стола 7, к которому прикреплен тросик 12, поворачивается винтовой шток регулятора 8, на котором жестко закреплен шкив 10,
чем и обеспечивается автоматическое (по мере убывания веса стопы заготовок ) уменьшение давления в цилиндре 6. Груз 11, подвешенньш посредством тросика к шкиву 9., соответственно поднимается.
В конце этапа при оставленном комплексе подыемный стол 7 и груз 11 находятся в верхнем положении. Подготовка устройства к очерёд-
ному этапу происходит следующим образом .
Поворотом ручки крана 15 управления подъемный стол 7 возвращают в
нижнее исходное положение, при этом винтовой шток регулятора 8 давления под действием опускающегося груза 1 1 , поворачиваясь в обратную сторону, тоже занимает свое исходное положение, затем убирают траверсу 4, открепляют кассету 13 поворотом голо- БОК штырей 14. Посредством подъемного средства пустую кассету 13 заменяют на полную и закрепляют на штырях
14, устанавливают траверсу 4 и поворотом ручки крана 15 подают сжатый воздух в бесштоковую полость пневмоцилиндра 6 , Загрузочное устройство готово ,к работе. Далее цикл повторя50
ется.
Формула изобрете ия
1. Загрузочное устройство для gg автоматических листообрабатывающих комплексов, содержащее смонтированный на основании силовой цилиндр, установленный на штоке силового цилиндра подъемный стол, магазин для
3
заготовок, Mexaf)H3M поштучной выдачи заготовок из магазина, а также элементы системы управления, о т- личающееся тем, что, с целью расширения технологических возможностей и повьпления надежности работы устройства, оно снабжено узлом автоматического регулирования давления рабочей среды в силовом цилиндре, выполненным в виде регулятора давления с винтовым штоком и кинематической связи винтового штока со штоком силового цилиндра, при этом рабочая полость регулято37175
ра давления связана с подпоршневой полостью силового цилиндра.
2.Устройство по П.1, отличающееся тем, что, с целью уменьшения скл трения в момент отделения верхней заготовки от стопы, оно снабжено пневмоклапаном, связанным с подпоршневой полостью силового
Q цилиндра.
3.Устройство по п., о т л и чающееся тем, что кинематическая связь винтового штока регулятора давления со штоком силового 15 цилиндра вьтолнена гибкой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи штучных заготовок | 1981 |
|
SU1015988A1 |
| Робототехнический комплекс | 1987 |
|
SU1416244A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1532149A1 |
| Магазинное устройство к промышленному роботу | 1985 |
|
SU1326374A1 |
| Магазинное устройство | 1987 |
|
SU1423227A1 |
| Устройство для стапелирования штучных заготовок | 1985 |
|
SU1444039A1 |
| Робототехнический комплекс | 1986 |
|
SU1349972A1 |
| Линия для многопереходной штамповки деталей из листового материала | 1987 |
|
SU1433587A1 |
| Робототехнический комплекс для изготовления деталей из листовых заготовок | 1987 |
|
SU1600894A1 |
| Магазин для размещения штучных заготовок | 1988 |
|
SU1532156A1 |
Изобретение относится к области листовой штамповки и может быть использовано в робототехнических автоматических комплексах. Целью изобретения является расширение технологических возможностей и повышение надежности работы устройства. В процессе работы устройства рука робота берет верхний лист из стопы заготовок , одновременно по команде системы управления открьюается электромагнитный клапан и происходит сброс давления под поршнем силового цилиндра. Рука робота снимает заготовку. Одновременно с поднятием стола посредством гибкой кинематической связи поворачивается шток регулятора давления и обеспечивается автоматическое уменьшение давления в под- поршневой полости силового цилиндра, по мере убывания веса стопы заготовок. Таким образом, сохраняется постоянное давление на шток си.пового- цилиндра по мере выработки стопы заготовок. 2 з.п. ф-лы, 3 ил. (С Л СО со СП
ue.f
фа.2
spua.3
Составитель Ю.Мацнев/
Редактор М.Недолуженко Техред Л.Олейник Корректор Л.Бескид
Заказ 4077/11 Тираж 730 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий. .
113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул. Проектная, 4
| 0 |
|
SU278619A1 | |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
