ОБЛАСТЬ ТЕХНИКИ
Заявленное изобретение относится к автоматизированным системам швейного производства, а именно к компонентам швейного робототехнического комплекса.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Из уровня техники известно автоматическое устройство снятия и размещения выкройки для шитья коллаборативного робота (см. CN 211079565 U, опубл. 24.07.2020). Система содержит конвейерное устройство сборочной линии, кооперативный робот и множество компьютерных шаблонных машин, конвейерное устройство и множество компьютерных шаблонных машин распределены в окружающем режиме с кооперативным роботом в центре. Конвейерное устройство сборочной линии содержит стойку, механизм подачи ленточной транспортировки и механизм разгрузки ленточной транспортировки, при этом разгрузочный конец механизма подачи ленточной транспортировки и подающий конец механизма разгрузки ленточной транспортировки обращены к кооперативному роботу. Адсорбционное устройство отрицательного давления неподвижно установлено в хвостовой части кооперационного робота, головка машины с компьютерным шаблоном обращена к кооперирующему роботу, а механизм подачи ленточного конвейера, механизм разгрузки ленточного конвейера, кооперативный робот и компьютерный шаблон машины электрически подключены к устройству управления.
Устройство, предложенное в (1), имеет ряд недостатков, поскольку необходимо присутствие оператора системы.
Наиболее близким аналогом заявленного устройства по мнению заявителя является автоматическая система швейной машины и способ ее управления (см. CN 113981624 A, опубл. 28.01.2022). Система автоматической швейной машины содержит робота-переносчика, расположенного в центре, множество швейных автоматических машин, расположенных вокруг робота-переносчика, и операционный стол, на операционном столе расположено множество станций, количество станций меньше указанных автоматических швейных машин, а два конца каждой станции - это подающий и разгрузочный конец соответственно; устройство транспортировки модельных пластин расположено на каждой станции и имеет двухслойную конструкцию, каждый из верхнего и нижнего слоев устройства транспортировки модельных пластин снабжен несущим столом, совершающим возвратно-поступательное движение между подающим концом и разгрузочным концом, несущие столы верхнего слоя и несущие столы нижнего слоя движутся синхронно, направления движения противоположны, а несущие столы используются для подшипников шаблонных плит. Робот-носитель используется для транспортировки шаблонных пластин между разгрузочным концом и швейными автоматическими машинами.
Предложенный аналог (2) наиболее близко подходит к решению проблем, решаемых заявленным изобретением, однако, по мнению заявителя, проблема решается не самым эффективным способом, поскольку предложенное устройство сложно в исполнении и управлении.
КРАТКОЕ ИЗЛОЖЕНИЕ ИЗОБРЕТЕНИЯ
Техническим результатом изобретения является создание автономного, простого в реализации, управлении и обслуживании механизма забора из стопки робототехнического комплекса "Робот-швея".
Технический результат достигается посредством создания механизма забора из стопки робототехнического комплекса "Робот-швея", содержащий корпус, на котором размещены два приводных узла.
Механизм забора характеризуется тем, что узел подъема для забора детали из стопки и ее вертикального перемещения, содержащий по меньшей мере две вакуумные присоски для схвата детали и по меньше мере два игольчатых захвата для удержания детали, датчик наличия детали, привод вертикального перемещения и шарико-винтовую пару для преобразования линейного движения, узел передвижения обеспечивает горизонтальное перемещение деталей, для чего внутри корпуса расположены линейные направляющие и ременная передача, а снаружи корпуса размещен привод горизонтального перемещения.
В предпочтительном варианте выполнения приводом горизонтального перемещения служит шаговый двигатель.
В предпочтительном варианте выполнения приводом вертикального перемещения служит шаговый двигатель.
В предпочтительном варианте выполнения механизм забора содержит три вакуумные присоски.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сущность изобретения поясняется чертежом, на котором:
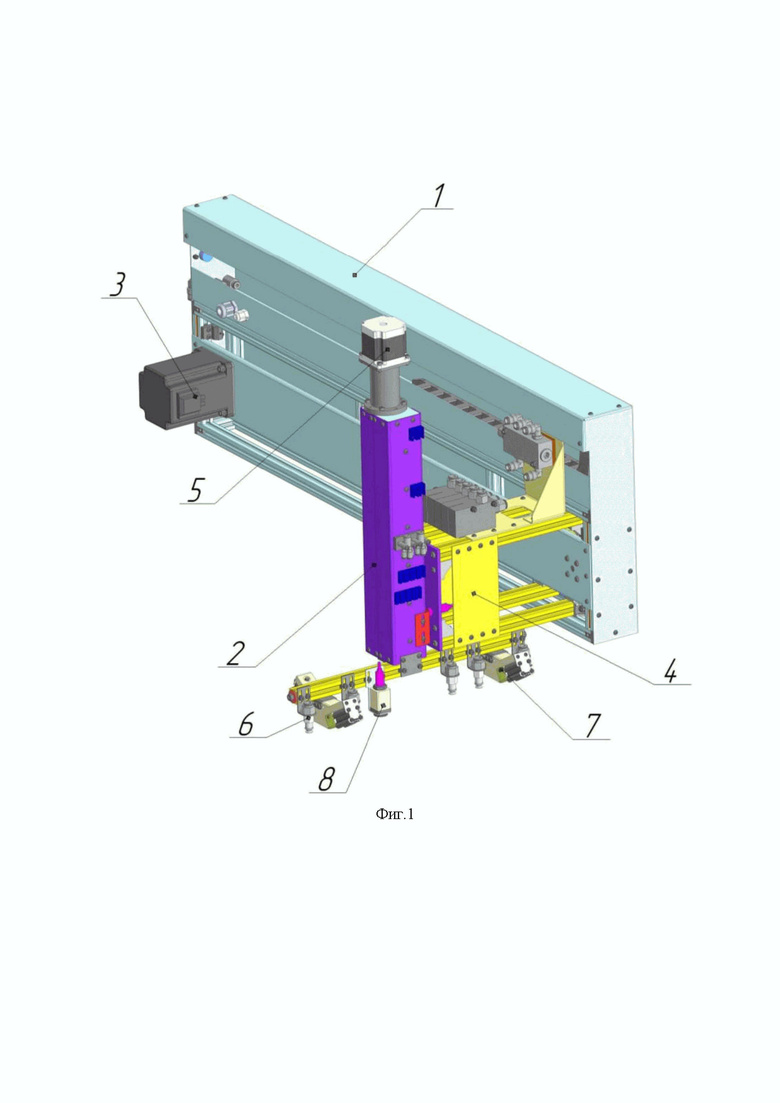
Фиг.1 - общий вид механизма забора из стопки робототехнического комплекса "Робот-швея".
Позиции на фиг.1 обозначают следующее:
1 - корпус;
2 - узел подъема;
3 - шаговый электродвигатель;
4 - узел передвижения;
5 - шаговый электродвигатель;
6 - вакуумная присоска;
7 - игольчатый захват;
8 - датчик наличия детали.
Эти чертежи не охватывают и, кроме того, не ограничивают весь объем вариантов реализации данного технического решения, а представляют собой только иллюстративный материал частного случая его реализации.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Заявленный механизм забора из стопки является частью робототехнического комплекса «Робот-швея» (далее - РТК), предназначенного для автоматизации обработки (обмётывания) срезов текстильных материалов при изготовлении швейных изделий.
РТК содержит стол, на котором размещены механизм забора из стопки, коллаборативный робот, оверлок. РТК снабжен системой технического зрения, размещенной на стойке, которая крепится к столу, светильником подсветки для освещения нижней поверхности детали, сменным прижимом, присоединяемым к коллаборативному роботу, и системой управления, шкафом силового энергоснабжения и шкафом управления.
РТК производит забор детали из стопки, определение контура системой технического зрения (СТЗ), подачу детали роботом к рабочему органу оверлока, обработку края и перемещение изделия на следующие операции. Цикл обметывания состоит и следующей последовательности операций:
1) Оператор укладывает стопку деталей приемную зону;
2) Оператор с помощью кнопочного поста запускает РТК в автоматическом режиме. Деталь с помощью механизма забора из стопки перемещается в зону сканирования СТЗ;
3) В зоне сканирования детали производится сканирование и распознавание контура системой технического зрения (СТЗ);
4) Робот осуществляет прижим детали с учетом ее ориентации;
5) Далее робот производит перемещение детали в рабочую зону оверлока;
6) Оверлок обметывает деталь по необходимому контуру, срезая излишки ткани;
7) Готовая деталь перемещается роботом с помощью прижима на следующий стол на дальнейшие операции.
Механизм забора, показан на фиг.1, предназначен для перемещения деталей от места раскладки к зоне сканирования и включает в себя два приводных узла. Узел подъема (2) служит для забора детали из стопки и ее вертикального перемещения. Схват детали осуществляется вакуумными присосками (6), а удержание - игольчатыми захватами (7). Наличие детали контролируется датчиком (8). Приводом служит шаговый электродвигатель (5), а линейное движение преобразуется шарико-винтовой парой. Узел передвижения (4) обеспечивает горизонтальное перемещение деталей, для чего внутри корпуса (1) расположены линейные направляющие и ременная передача. Привод обеспечивает шаговый электродвигатель (3).
ПРОМЫШЛЕННОЕ ПРИМЕНЕНИЕ
Предложенный механизм забора из стопки робототехнического комплекса "Робот-швея" предназначен для применения в швейном производстве.
| название | год | авторы | номер документа |
|---|---|---|---|
| Робототехнический комплекс "Робот-швея" | 2024 |
|
RU2836073C1 |
| Система технического зрения робототехнического комплекса "Робот-швея" | 2024 |
|
RU2832590C1 |
| СПОСОБ ОБРАБОТКИ ЛИСТОВОГО МАТЕРИАЛА, В ЧАСТНОСТИ БАНКНОТ, И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОБРАБОТКИ ЛИСТОВОГО МАТЕРИАЛА, В ЧАСТНОСТИ, БАНКНОТ | 2020 |
|
RU2737603C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ СХВАТА МАНИПУЛЯТОРА | 2004 |
|
RU2288092C2 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Робототехнический комплекс | 1987 |
|
SU1416244A1 |
| РОБОТИЗИРОВАННЫЙ МОБИЛЬНЫЙ КУРЬЕРСКИЙ КОМПЛЕКС | 2022 |
|
RU2787547C1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| КОЛЛАБОРАТИВНЫЙ РОБОТИЗИРОВАННЫЙ УЧАСТОК ПЕРЕСЧЕТА ДЕНЕЖНОЙ НАЛИЧНОСТИ | 2018 |
|
RU2697316C1 |
| Робототехнический комплекс для изготовления деталей из листовых заготовок | 1987 |
|
SU1600894A1 |
Изобретение относится к автоматизированным системам швейного производства, а именно к компонентам швейного робототехнического комплекса. Механизм забора из стопки робототехнического комплекса "Робот-швея" содержит корпус, на котором размещены два приводных узла. Узел подъема для забора детали из стопки и ее вертикального перемещения, содержащий по меньшей мере две вакуумные присоски для схвата детали и по меньшей мере два игольчатых захвата для удержания детали, датчик наличия детали, привод вертикального перемещения и шарико-винтовую пару для преобразования линейного движения, узел передвижения обеспечивает горизонтальное перемещение деталей, для чего внутри корпуса расположены линейные направляющие и ременная передача, а снаружи корпуса размещен привод горизонтального перемещения. 3 з.п. ф-лы, 1 ил. 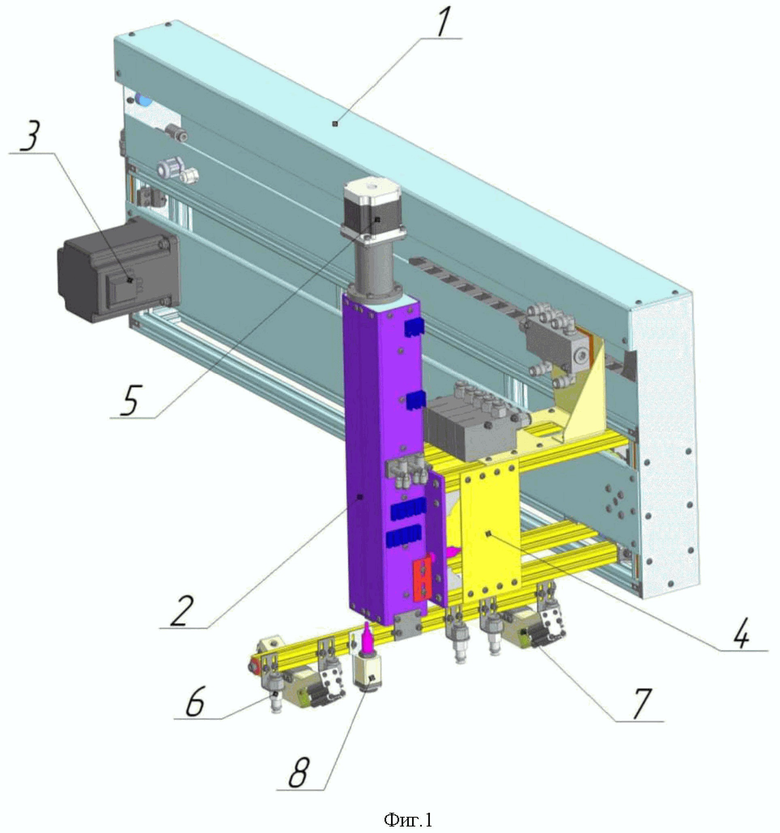
1. Механизм забора из стопки робототехнического комплекса "Робот-швея", содержащий корпус, на котором размещены два приводных узла: узел подъема и узел передвижения, отличающийся тем, что узел подъема для забора детали из стопки и ее вертикального перемещения содержит по меньшей мере две вакуумные присоски для схвата детали и по меньшей мере два игольчатых захвата для удержания детали, датчик наличия детали, привод вертикального перемещения и шарико-винтовую пару для преобразования линейного движения, узел передвижения обеспечивает горизонтальное перемещение деталей, для чего внутри корпуса расположены линейные направляющие и ременная передача, а снаружи корпуса размещен привод горизонтального перемещения.
2. Механизм забора из стопки по п.1, отличающийся тем, что приводом горизонтального перемещения служит шаговый двигатель.
3. Механизм забора из стопки по п.1, отличающийся тем, что приводом вертикального перемещения служит шаговый двигатель.
4. Механизм забора из стопки по п.1, отличающийся тем, что содержит три вакуумные присоски.
| CN 216639885 U, 31.05.2022 | |||
| CN 106629153 A, 10.05.2017 | |||
| CN 214692114 U, 12.11.2021 | |||
| CN 208561052, 01.03.2019 | |||
| CN 113174706 A, 27.07.2021 | |||
| Приспособление для снятия или укладки верхнего настила штабеля обрабатываемых деталей | 1981 |
|
SU1230941A1 |
| CN 117819251 A, 05.04.2024 | |||
| CN 206703020 U, 05.12.2017 | |||
| CN 217733453 U, 11.04.2022 | |||
| Пила для распиловки мясных туш | 1985 |
|
SU1242091A1 |
| CN 117702382 A, 15.03.2024 | |||
| CN 106698019 A, 24.05.2017. | |||

