ю ю VI о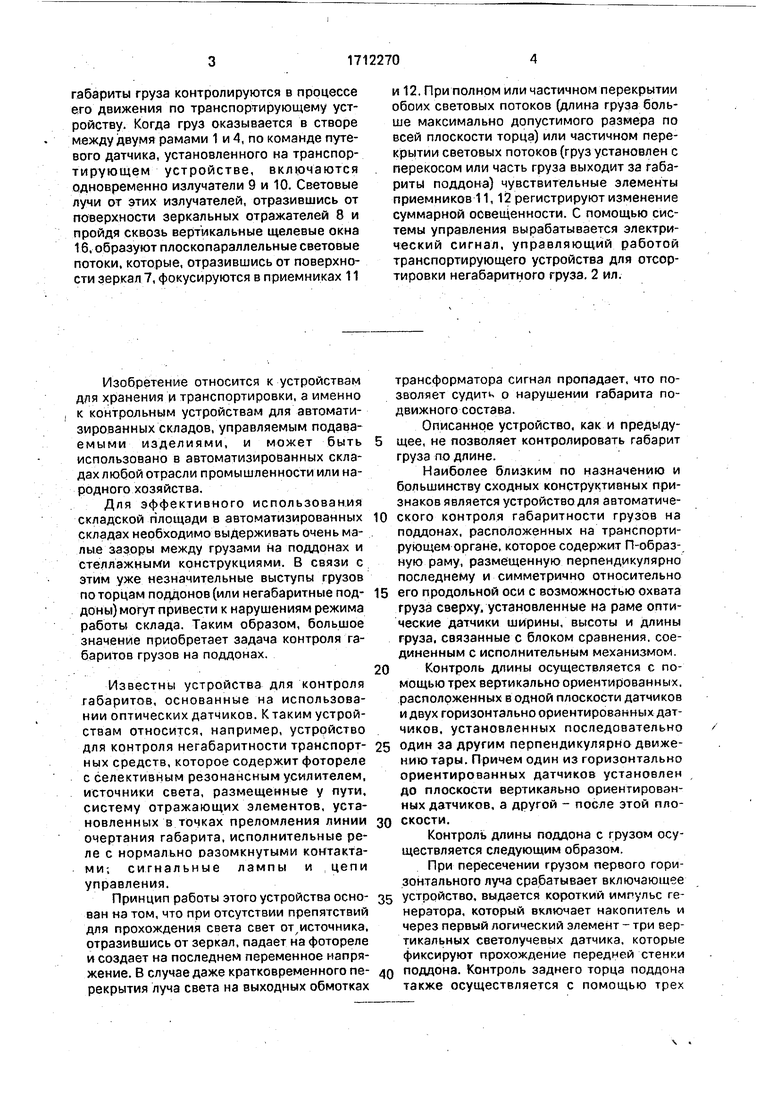

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ ГАБАРИТОВ ГРУЗОВ, ПОГРУЖЕННЫХ НА ПОДВИЖНОЙ СОСТАВ, В ПРОЦЕССЕ ИХ ДВИЖЕНИЯ И СИСТЕМА ЭЛЕКТРОННЫХ ГАБАРИТНЫХ ВОРОТ ДЛЯ ДИСТАНЦИОННОГО КОНТРОЛЯ ГАБАРИТОВ ГРУЗОВ, ПОГРУЖЕННЫХ НА ПОДВИЖНОЙ СОСТАВ, В ПРОЦЕССЕ ИХ ДВИЖЕНИЯ | 2004 |
|
RU2249523C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОММЕРЧЕСКОГО ОСМОТРА ПОЕЗДОВ И ВАГОНОВ (АСКО ПВ) | 2004 |
|
RU2252170C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗОН И СТЕПЕНЕЙ НЕГАБАРИТНОСТИ ГРУЗОВ НА ОТКРЫТОМ ПОДВИЖНОМ СОСТАВЕ С ПОМОЩЬЮ ТЕЛЕВИЗИОННЫХ ИЗОБРАЖЕНИЙ | 2008 |
|
RU2355595C1 |
| СПОСОБ И СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ НЕГАБАРИТНОСТИ ГРУЗОВ НА ПОДВИЖНОМ СОСТАВЕ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2006 |
|
RU2311311C2 |
| НАЗЕМНЫЙ ДИАГНОСТИЧЕСКИЙ КОНТРОЛЬНО-ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС | 1997 |
|
RU2120876C1 |
| УСТРОЙСТВО КОНТРОЛЯ ГАБАРИТОВ ГРУЗОВ И ПОДВИЖНОГО СОСТАВА В ПРОЦЕССЕ ИХ ДВИЖЕНИЯ | 2016 |
|
RU2624365C1 |
| Автоматизированная система коммерческого осмотра поездов и вагонов с модульной архитектурой (АСКО ПВ 3.0) | 2018 |
|
RU2713132C1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ ВАГОНОВ В СОСТАВЕ ПОЕЗДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2408487C1 |
| Акселерометр | 1985 |
|
SU1278730A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ НЕГАБАРИТНОСТИ ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2339529C1 |
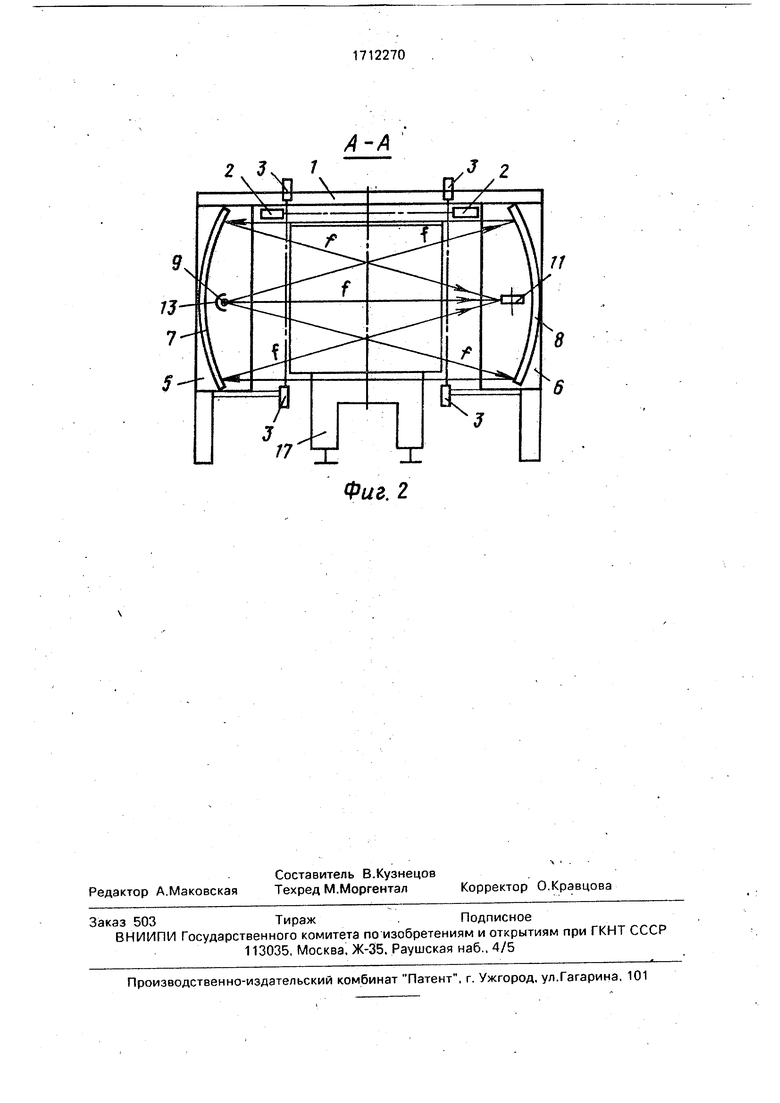
Изобретение относится к контрольным устройствам для автоматизированных скла-, дов. Цель изобретения - расширение техно- логических возможностей путем обеспечения контроля длины груза вдольвсей плоскости каждого из его торцов. Устройство содержит раму 1. на которой установлены горизонтально ор'иентированный оптический датчик 2 для контроля высоты и два вертикально ориентированных датчика 3 для контроля ширины. Вторая портальная рама 4 параллельна nepBof\, раме. На рамах 1 и 4 закреплены попарно светонепроницаемые (экранирующие) корпуса 5 и 6. в которых размещены вогнутые, например сферические, отражатели 7 и 8., Фокусы отражателей 7 и 8 размещены на одной горизонтальной линии, перпендикулярной направлению движения груза. В фокусных точках отражателей 7 размещены излучатели 9, 10. а в фокусных точках отражателей 8 -приемники 11. 12. Корпуса 5. 6 снабжены щелевыми окнами 15, 16. которые совпадают с фокальными осями отражателей, Всесяс
9иг.Г
габариты груза контролируются в процессе его движения по транспортирующему устройству. Когда груз оказывается в створе между двумя рамами 1 и 4, по команде путевого датчика, установленного на транспортирующем устройстве, включаются одновременно излучатели 9 и 10. Световые лучи от этих излучателей, отразившись от поверхности зеркальных отражателей 8 и пройдя сквозь вертикальные щелевые окна 16. образуют плоскопараллельные световые потоки, которые, отразившись от поверхности зеркал 7, фокусируются в приемниках 11 Изобретение относится к устройствам для хранения и транспортировки, а именно к контрольным устройствам для автоматизированных складов, управляемым подаваемыми изделиями, и может быть использовано в автоматизированных складах любой отрасли промышленности или народного хозяйства. Для эффективного использования складской Нлощади в автоматизированных складах необходимо выдерживать очень малые зазоры между грузами На поддонах и стеллажными конструкциями. В связи с этим уже незначительные выступы грузов по торцам поддонов (или негабаритные поддоны) могут привести к нарушениям режима работы склада. Таким образом, большое значение приобретает задача контроля габаритов грузов на поддонах. Известны устройства для контроля габаритов, основанные на использовании оптических датчиков. К таким устройствам относится, например, устррйство для контроля негабаритности транспортных средств, которое содержит фотореле с селективным резонансным усилителем, источники света, размещенные у пути, систему отражающих элементов, установленных в точках преломления линии очертания габарита, исполнительные реле с нормально разомкнутыми контактами-, сигнальные лампы и цепи управления. Принцип работы этого устройства основан на том, что при отсутствии препятствий для прохождения света свет от источника. отразившись от зеркал, падает на фотореле и создает на последнем переменное напряжение. В случае даже кратковременного перекрытия луча света на выходных обмотках
и 12. При полном или частичном перекрытии обоих световых потоков (длина груза больше максимально допустимого размера по всей плоскости торца) или частичном перекрь|тии световых потоков (груз установлен с перекосом или часть груза выходит за габариты поддона) чувствительные элементы приемников 11,12 регистрируют изменение суммарной освещенности. С помощью системы управления вырабатывается электрический сигнал, управляющий работой транспортирующего устройства для отсортировки негабаритного груза. 2 ил. трансформатора сигнал пропадает, что позволяет судитк о нарушении габарита подвижного состава. Описанное устройство, как и предыдущее, не позволяет контролировать габарит груза по длине. Наиболее близким по назначению и большинству сходных конструктивных признаков является устройство для автоматического контроля габаритности грузов на поддонах, расположенных на транспортирунэщем органе, которое содержит П-образную раму, размещенную перпендикулярно последнему и симметрично относительно его продольной оси с возможностью охвата груза сверху, установленные на раме оптические датчики ширины, высоты и длины груза, связанные с блоком сравнения, соединенным с исполнительным механизмом. Контроль длины осуществляется с помощью трех вертикально ориентированных, расположенных водной плоскости датчиков и двух горизонтально ориентированных датчиков, установленных последовательно один за другим перпендикулярно движению тары. Причем один из горизонтально ориентированных датчиков установлен до плоскости вертикально ориентированных датчиков, а другой - после этой плоскости. Контроль длины поддона с грузом осуществляется следующим образом. При пересечении грузом первого горизонтального луча срабатывает включающее устройство, выдается короткий импульс генератора, который включает накопитель и через первый логический элемент - три вертикальных светолучевых датчика, которые фиксируют прохождение передней стенки поддона. Контроль заднего торца поддона также осуществляется с помощью трех вертикальных светолучевых датчиков. При пересечении за,пней стенкой поддона первого горизонтального луча (а этот момент второй горизонтальный луч еще перекрыт поддоном) выдается второй импульс генератора, который переводит числовой накопитель Б следующую позицию и включает через второй логический элемент три верти кальных светолучевых датчика для контроля задней стенки поддона с грузом. При обнаружении негабаритностипр-ддона с грузом вырабатывается сигнал, блокирующий поступление на контрольную стаьгцию очередного поддона, Недостатком устройства, принятого за прототип, является то. что контроль переднего и заднего торцов поддона с грузом осуществляется тремя дискретными лучами от трех вертикальноориентированных датчиков. Следовательно, контролируется не вся плоскость торца поддона, что не исклкэчает случаи, когда штучный груз местами выходит за пределы габарита поддона. Для более полного охвата плоскости торца поддона требуется размещение большего числа датчиков, что удорожает конструкцию. Кроме того, известное устройство не позволяет контролировать габарит длины груза. :.:. Ц15льюизобретения является устранение указанных недостатков, а имбннр расширение технологических возможностей устройства путем обеспечения контроля длины груза вдоль всей плоскости каждого из его торцов. Указанная цель достигается тем, что устройство снабжено второй П-образной рамой, установленной параллельно первой и размещенной аналогично ей. на стойках каждой из рам смонтированы один напротив другого вогнутые в горизонтальном и вертикальном направлениях зеркальные отражатели с расположением их фокусов в, зоне каждой рамы на одной горизонтальной линии, лежащей в плоскости этой рамы, излучатель и приемник каждого из датчиков длины груза расположены в фокусах соответствующих отражателей каждой рамы, при этом излучатель экранирован со сторо ны соответствующего ему отра 1 :ателя, з каждый упомянутый отражатель с соответствующим ему приемником или излучателем размещен в экранированном корпусе, выполненном со щелевым окном, вертикальная ось симметрии которого размещена в вертикальной плоскости, прохо дящей через фокус этого отражателя. Устройство позволяет с помощью одного излучателя и приемника формировать вертикальный плоскопараллельный световой поток, направленный перпендикулярно движению контролируемого груза, а затем концентрировать его в фокусе приемНика. Одновременное перекрытие двух плоскопараллельных световых потоков в любой их точке (длина груза больше допустимой или груз установлен с перекосом) приводит к изменению суммарной Освещенности приемника, которое регистрируется его чувствительным элементом и с помощью системы управления преобразуется в электрический сигнал, управляющий транспортной линией для отсортировки груза. На фиг. 1 представлено устройство. общий вид; на фиг. 2 - разрез А-А на фиг. 1. Устройство содержит портальную раму 1, на которой установлены горизонтально ориентированный оптический датчик 2 для контроля высоты и два вертикально ориентированных датчика 3 для контроля ширины. Плоскость второй портальной рамы А параллельна плоскости портальной рамы 1. Расстояние между рамами 1 и 4 .равно заданному габариту длины. На портальных рамах 1 и 4 пр парно закреплены светонепроницаемые (экранирующие) корпуса 5 и 6. В корпусах 5 и 6 на рамах 1 и 4 размещены вогнутые, например сферические, отражатели 7 и 8. Фокусы отражателей 7 и 8 размещены на одной горизонтальной линии, перпендикулярной направлению движения груза. Высота отражателей равна высоте контролируемого груза. В фокусных точках отражателей 7 размещены излучатели 9. 10, а в фокусных точках отражателей 8 - приемники 11, 12. Излучатели 9, 10 экранированы со стороны собственных отражателей экранами 13. 14. Корпуса 5 и 6 снабжены щелевыми окнами 15 и 16..Щелевые окна15 и 16 размещены так, что совпадают с фокальными осями отражателей. Система управления устройства содержит электронный усилитель и преобразователь электрических сигналов, поступающих с оптических датчиков. В качестве преобразователя может быть использован аналогоцифровой преобразователь, который вырабатывает число импульсов, пропорцио-. нальное электрическому сигналу, сравнивает его с эталонным числом импульсов и при их несовпадении выдает электрический сигнал, управляющий транспортирующим устройством, для отсортировки негабаритного груза. Устройство работает следующим обраом.
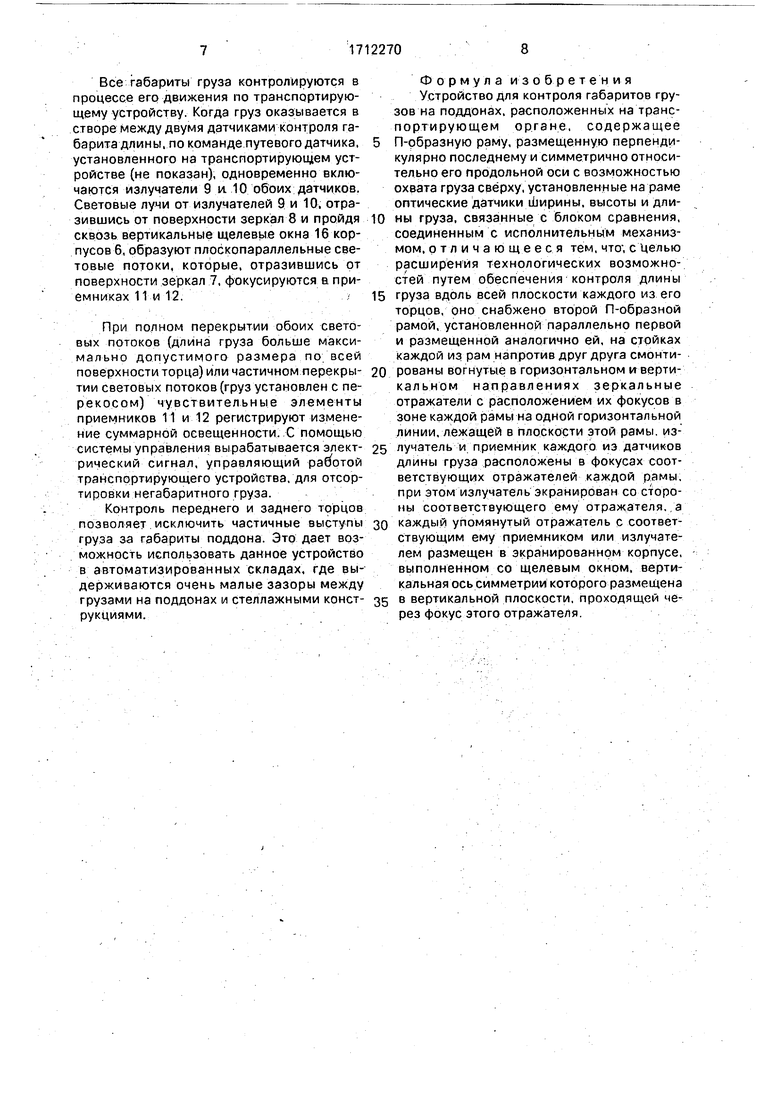
Все габариты груза контролируются в процессе его движения по транспортирующему устройству. Когда груз оказывается в створе между двумя датчиками контроля габарита длины, по команде путевого датчика. установленного на транспортирующем устройстве (не показан), одновременно включаются излучатели 9 и. 10 обоих датчиков. Световые лучи от излучателей 9 и 10. отразившись от поверхности зеркал 8 и пройдя сквозь вертикальные щелевые окна 16 корпусов 6, образуют плоскопараллельные световые потоки, которые, отразившись от поверхности зеркал 7. фокусируются а приемниках 11 и 12./
При полном перекрытии обоих световых потоков (длина груза больше максимально допустимого размера по всей поверхности торца) или частичном перекрытии световых потоков (груз установлен с перекосом) чувствительные элементы приемников 11 и 12 регистрируют изменение суммарной освещенности. С помощью системы управления вырабатывается электрический сигнал, управляющий работой транспортирующего устройства, для отсортировки негабаритного груза.
Контроль переднего и заднего торцов позволяет исключить частичные выступы груза за габариты поддона. Это дает возможность использовать данное устройство в автоматизированных складах, где выдерживаются очень малые зазоры между грузами на поддонах и стеллажными конструкЦиями.
Формула из о б р е т е н и я Устройство для контроля габаритов грузов на поддонах, расположенных на транспортирующем органе, содержащее П-рбразную раму, размещенную перпендикулярно последнему и симметрично относительно его продольной оси с возможностью охвата груза сверху, установленные на раме оптические датчики Ширины, высоты и длины груза, связанные с блоком сравнения, соединенным с исполнительным механизмом, отличаю щ е е с я тем. что; с Целью расширенйя технологических возможностей путем обеспечения контроля длины груза вдоль всей плоскости каждого из его торцов, оно снабжено второй П-образной рамой, установленной параллельно первой и размещенной аналогично ей, на стойках каждой из рам напротив друг друга смонтированы вогнутые в горизонтальном и вертика ль ном направлениях зеркальные отражатели с расположением их фокусов в зоне каждой рамы на одной горизонтальной линии, лежащей в Плоскости этой рамы, излучатель и приемник каждого из датчиков длины груза расположены в фокусах соответствующих отражателей каждой рамы, при этом излучатель экранирован со стороны соответствующего ему отражателя., а каждый упомянутый отражатель с соответствующим ему приемником или излучателем размещен в экранированном корпусе, выполненном со щелевым окном, вертикальная ось симметрии которого размещена в вертикальной плоскости, проходящей через фокус этого отражателя.
5
/I А
Фиг. 2
| Устройство для контроля негабаритности транспортных средств | 1978 |
|
SU710851A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
