Изобретение относится к машиностроению, к контрольно-измерительной технике и может быть использовано при измерении координат точек поверхности различных объектов.,
Цель изобретения - пойышение точности измерений.
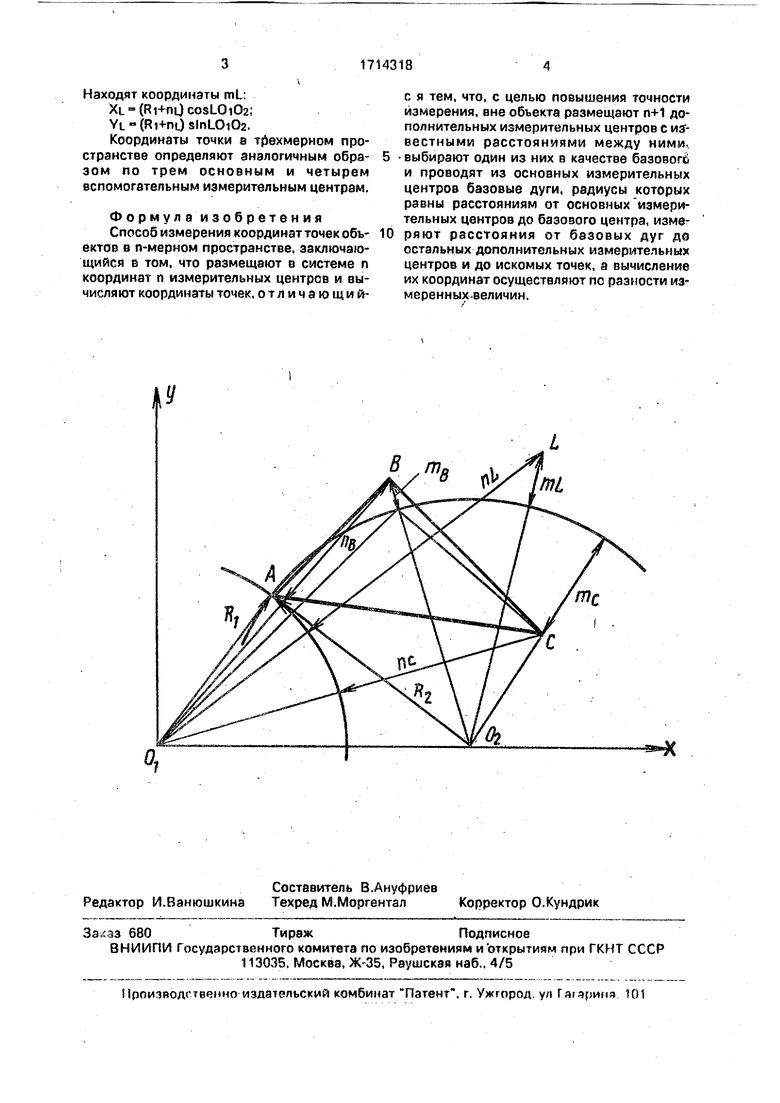
На чертеже представлена схема определения координат точки L в двумерном пространстве.
Сущность способа заключается в следующем.
В выбранной системе координат Oi XY размещают п, т.е. два измерительных центра Oi и 02. В той же системе координат размещают п+1 т.е. три дополнительных измерительных центра А, В, С с известным расстоянием АВ, ВС и СА. Из центров Oi и 02 проводят пересекающиеся в точке А 6азовые дуги радиусом RI и R2. Измеряют piacстоянйя от базовых дуг до центровBi и С и точки L
Составляют системы уравнений:
( АВ - (Ri+nB) - 2Ri(Rt+nB) cosAOiB:
I ВС - (Ri+пв) + (Ri+nc) - 2(Ri+helRi + nc) cosBOiC;
( AC - Rl Rl+nc) - 2 R 1 ( R 1 + n с )co3AOiC.
. AB - Ra+(R2+mB ) - 2R2(R7+mB ) cosAOjB;
I BC - ( B) + fPj-fticf - 2(R7+mo ) (R2-mc)co«BOjC;
AC - R2+(Rj-mcf - 2Rj(R2-mc) cosA02C,
Подставляя в уравнения измеренные величины, определяют значения Ri и R2. Определяют значение углов:
АС -b(R2-mc) -R2
/iACO2 arccos
2 AC(R2 -me) AC +(Ri n) -Ri /.ACOi arccos
2 ACfRl -t-fic) ZQlC02 -/ACOi . Определяют расстояние между основными измерительными центрами:
OiCJj V(R,+nc)-(-{R2-mc), +nc)(Ri-mc)coiOiC
Определяют угол L ОЮг:
1т глъ: Г Находят координаты ml:
XL (Ri+nt) cosLOiOa;
YL-{Ri+nOslnLOi02.
Координаты точки e т| ехмерном пространстве определяют аналогичным образом по трем основным и четырем вспомогательным измерительным центрам.
Формулаизобретения Способ измерения координат точек объектов в п-мерном пространстве, заключающийся в том, что размещают в системе п координат п измерительных центров и вычисляют координаты точек, отличающийс я тем, что, с целью повышения точности измерения, вне объекта размещают п+1 дополнительных измерительных центров с известными расстояниями между ними, выбирают один из них в качестве базовоп и проводят из основных измерительных центров базовые дуги, радиусы которых равны расстояниям от основныхизмерительных центров до базового центра, измеряют расстояния от базовых дуг до остальных дополнительных измерительных центров и до искомых точек, а вычисление их координат осуществляют по разности измеренных-величин.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАЛЬНОМЕРНО-РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2007 |
|
RU2363010C2 |
| Ротор двухроторной машины | 1987 |
|
SU1807218A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ РАЗМЕРОВ, СЕРВЕР УПРАВЛЕНИЯ, ПОЛЬЗОВАТЕЛЬСКИЙ ТЕРМИНАЛ И СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ РАЗМЕРОВ | 2018 |
|
RU2745345C1 |
| Профиль поверхности обода железнодорожного колеса грузового вагона | 2024 |
|
RU2839027C1 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ТОЧЕК КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА ПРИ ПРАВКЕ | 2003 |
|
RU2239505C1 |
| ЗУБЦЫ ЭВОЛЬВЕНТНОЙ ШЕСТЕРНИ ДЛЯ ДОЗАТОРА ТЕКУЧЕЙ СРЕДЫ | 2009 |
|
RU2499982C2 |
| Способ контроля профиля поршня | 1989 |
|
SU1652801A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСА И КООРДИНАТ САМОЛЕТА | 2007 |
|
RU2356012C1 |
| Способ получения развертки поверхности манекена | 1980 |
|
SU925302A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СТРЕЛКА ПО ЗВУКУ ВЫСТРЕЛА | 2015 |
|
RU2610908C2 |
Изобретение относится к машиностроению, в частности к контрольно-измеритель- ио'Л технике. Цель изобретения - повышение точности измерений. Цель достигается тем, что в выбранной системе п координат устанавливают п основных и п+1 дополнительных измерительных центров. Измеряют расстояния от основных центров до дополнительных и до искомых точек, а вычисление их координат осуществляют по разности измеренных величин. 1 ил.
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
