Изобретение относится к горной автоматике, а более конкретно к применению экскаваторов-драглайнов для загрузки приемных сосудов ограниченных габаритов, в частности транспортных средств, а также к автоматизации технологического цикла при использовании экскаваторов-драглайнов с применением диалоговой системы, и может быть использовано на открытых горных работах.,
Цель изобретения - повышение производительности экскаватора-драглайна за счет сокращения времени наведения ковша на место разгрузки при сохранении точности наведения.
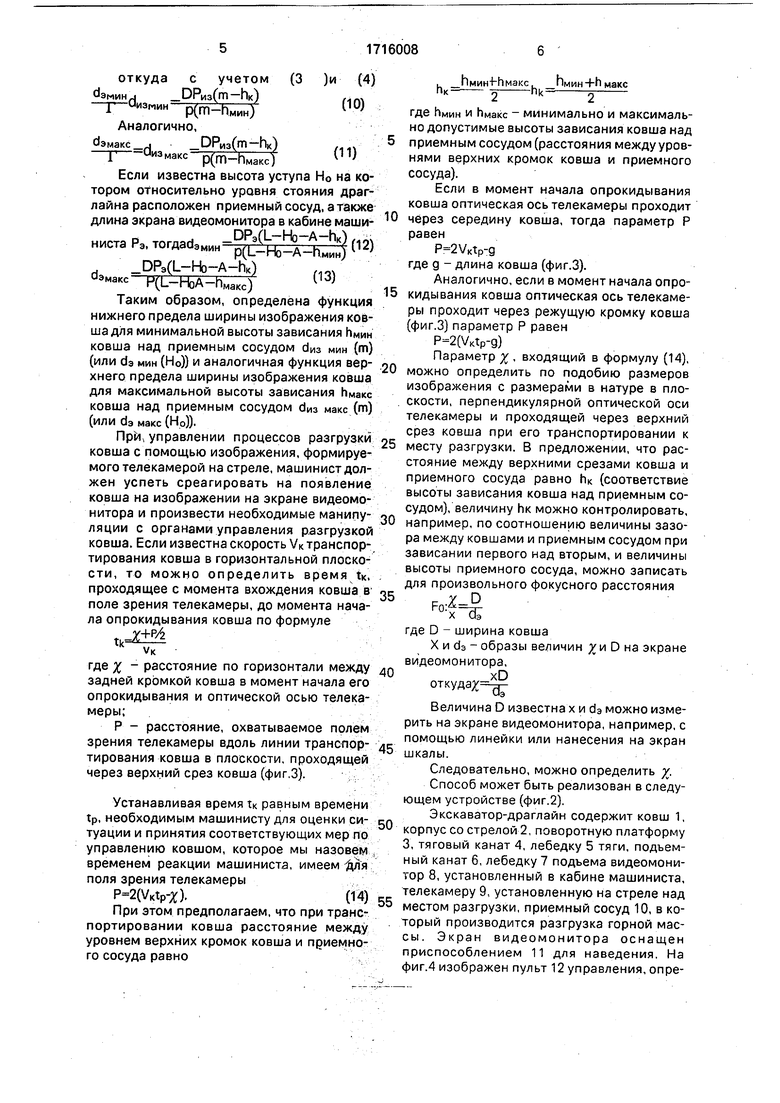
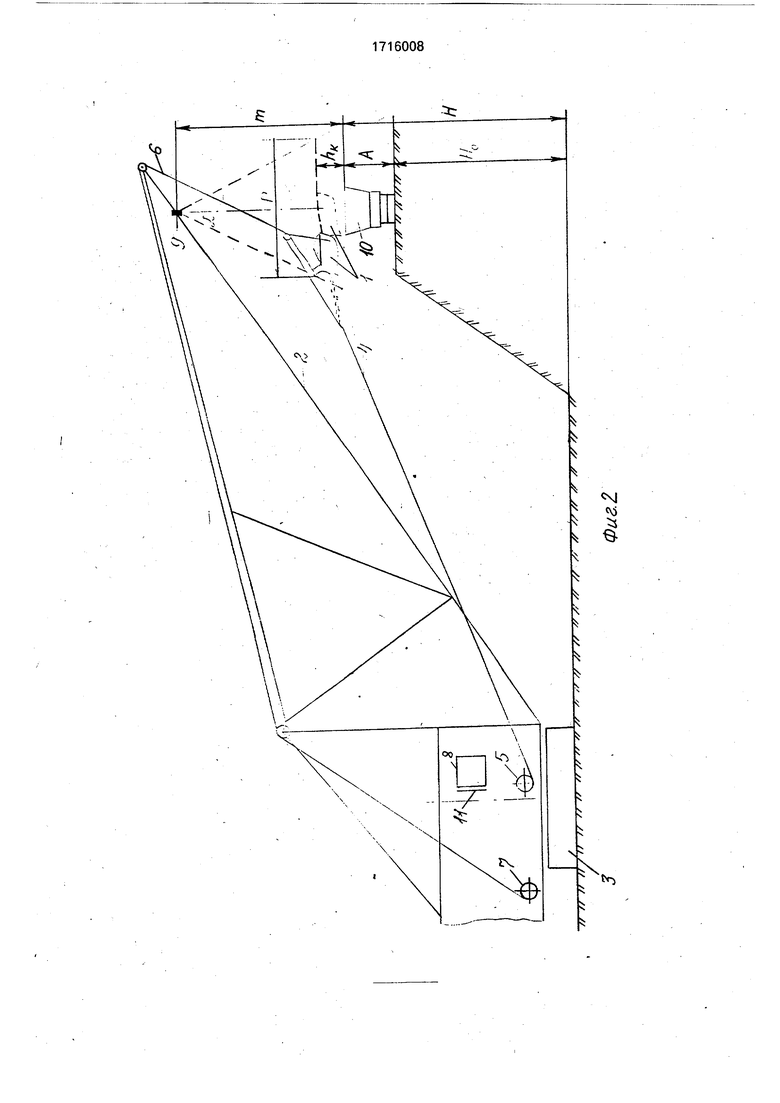
На фиг.1 изображен экскаватор-драглайн с установленной на стреле телекамерой, осуществляющий погрузку приемного сосуда (железнодорожного думпкара) общий вид; на фиг.2 - то же, осуществляющий
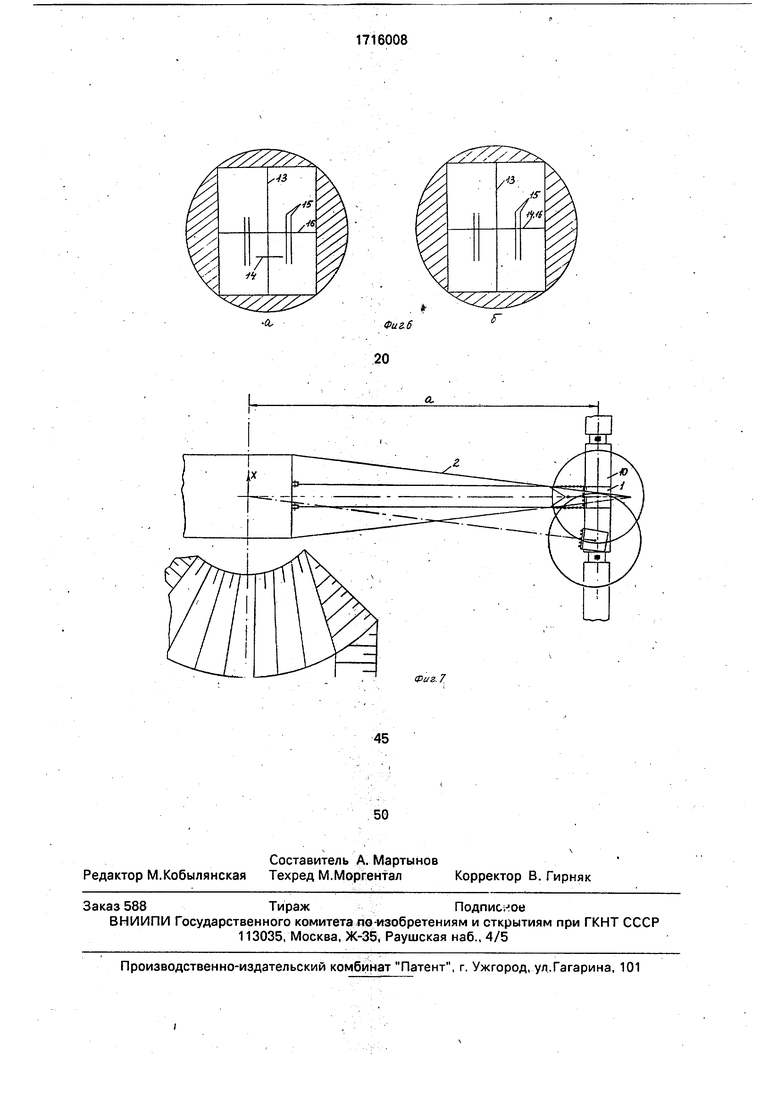
верхнюю погрузку приемного сосуда; на фиг.З - варианты расположения ковша драглайна на изображении перед началом его опрокидывания; на фиг.4 - блок-схема основных частей телевизионной системы со вспомогательными приспособлениями на экране видеомонитора; на фиг.5 - изображение на экране видеомонитора в кабине машиниста в момент зависания ковша над транспортным сосудом перед его разгруз- кой с наложением на него центральной вертикальной линии, горизонтальной метки и вертикальных контрольных меток; на фиг,6 - варианты написания на экран видеомонитора приспособлений для наведения с цен- тральной вертикальной линией, с .горизонтальной и вертикальной метками; на фиг.7 - драглайн, вид сверху.
По известным габаритным размерам приемного сосуда и ковша (пусть, напри- мер, С - ширина приемного сосуда, D - ширина ковша) определяют соотношение между этими габаритами на экране видеомонитора и фокусным расстоянием оптической системы телекамеры F, и высоты зависания ковша над приемным сосудом hK (фиг.1 и 2). Вводят обозначения Сэ и Сиз - ширина приемного сосуда на экране видеомонитора и на изображении, формируемом оптической системой телекамеры на ее фо- томишени, da и йиз аналогичные величины для ширины ковша, при этом
Г
С, da
увеличение размера изоСиз dua
бражения при переносе с фотомишени на экран видеомонитора. Высоту Ьк зависания ковша над приемным сосудом определяют как расстояние по вертикали между верхним срезом приемного сосуда и верхним срезом ковша, которые визуально наблюда- ют на изображении, т- расстояние от верхнего среза приемного сосуда до главной плоскости оптической системы телекамеры (объектива), гпиз - расстояние от главной плоскости оптической системы до изобра- жения.
тики
Согласно законам геометрической
+
ГЯиз
Риз (m -hk) Р
(3)
Отсюда
Р Риз ( m - hK ) Р + Риз
Pa(m-hk)
ГР где Рэ - длина экрана видеомонитора.
Если известны Н0 - высота уступа, на котором расположен приемный сосуд, и L - высота подвеса телекамеры относительно уровня драглайна, тогда
L Ho+A+m где А - высота приемного сосуда;
m - расстояние от телекамеры до верхнего среза приемного сосуда.
Тогда формулу для фокусного расстояния оптической системы телекамеры можно пере... Рэ ( L- Но- A -hk ) ,„ питать в виде F - - г-Ј (4)
г
Выведем формулу для ширины изображения
ковша
da.
D m -hK
ку-г-
Оиз
ГПиз
1
+
имеем D
m - Ik dns( m - h к) С учетом ( 3) и d3, DF „ DF О m-lv-F m-h,
he
Аналогично получают фрины изображения приемн При этом, считая, что riK«mкой изображения приемного регаем. Поскольку
ГПиз
1 .С 1
т-г)к Сизт Сучетом(3)и(4)
F
35 40 45
50
(8)
(m-hK) pm СРиз(1-Но-А-Ик)
p(L-Ho-A) г -CP3(L-Ho-A-h,) Сэ p(L-Ho-A)
Учитывают, что операции масштабирования проводится относительно верхнего среза ковша при средней высоте hK его зависания над приемным сосудом, определяемой как
Г1к
Пмин ЬИмакс

| название | год | авторы | номер документа |
|---|---|---|---|
| Землеройная машина с автоматизированным наведением ковша на место разгрузки | 1988 |
|
SU1602947A1 |
| ПОГРУЗОЧНЫЙ ЭКСКАВАТОР-ДРАГЛАЙН | 2010 |
|
RU2431719C1 |
| Способ загрузки транспортных средств экскаватором-драглайном | 1990 |
|
SU1752694A1 |
| Перегрузочный пункт скальной породы в карьере | 1990 |
|
SU1765414A1 |
| Экскаватор-драглайн | 1990 |
|
SU1728394A1 |
| Рабочее оборудование экскаватора-драглайна | 1985 |
|
SU1265255A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2015 |
|
RU2597896C1 |
| ПОГРУЗОЧНЫЙ ЭКСКАВАТОР-ДРАГЛАЙН | 2000 |
|
RU2186178C1 |
| Рабочее оборудование экскаватора-драглайна | 1986 |
|
SU1404596A1 |
| ЭКСКАВАТОР-ДРАГЛАЙН | 2000 |
|
RU2186909C1 |


Изобретение относится к автоматизированному управлению экскаваторами-драглайнами при выполнении загрузки приемных сосудов (ПС) ограниченных габаритов. Цель изобретения-повышение производительности экскаватора-драглайна за счет сокращения времени наведения ковша на место разгрузки при сохранении точности наведения. Устанавливают телекамеру на стреле на расстоянии, равном радиусу разгрузки, а оптическую ось направляют вертикально. На экране видеомонитора устанавливают специальное приспособление, обеспечивающее определенное положение ковша по отношению к приемному сосуду, и контролируют перемещение горной массы в приемный сосуд. Дополнительно измеряют высоту уступа расположения приемного сосуда относительно уровня земной поверхности, расстояние от телевизионной камеры до уровня земной поверхности, длину изображения расстояния от оптической оси телекамеры до задней кромки ковша в момент начала его опрокидывания и размер ширины изображения ковша. Задают размер ширины ковша, высоту ПС, максимальное и минимальное допустимые расстояния между верхними срезами ковша и ПС в момент зависания ковша над ПС, линейное увеличение телевизионной системы, линейный размер экрана по вертикали, скорость транспортирования ковша и время реакции машиниста. По измеренным и заданным параметрам определяют по приведенной математической зависимости фокусное расстояние объекта. Это определяет производительность экскаватора-драглайна, так как включает все технические показатели технологической цепочки при наведении на место разгрузки.7 ил. ч а Os О о 00
Поскольку
m - hK гпиз
РРиз
где Р - линейный размер поля зрения телекамеры;55
Риз-длина секции накопления (фотомишени телекамеры), имеем
1Я 1+ЈН 2
где Ьмин и ЬмакС - минимально и максимально допустимые высоты зависания ковша над приемным сосудом.
По аналогии с приведенными для dns и Сиз
m-hK тиз т -hK йизмин т м F
откуда
Оэминj
-Г-иизмин
с учетом .РРиз(т-Ьк)
(3
р(т-ИМин) Аналогично,
йэмакс- РРиз(т-1) гОиз „акс
)И (4) (Ю)
(11)
ниста Рэ, тогдайэ
мин
Р(ГП-Пмакс)
Если известна высота уступа Н0 на котором относительно уровня стояния драглайна расположен приемный сосуд, а также длина экрана видеомонитора в кабине маши- РРэ(Ь-Но-А-Ик) и„. р(1 -Но-А-П,мин) ли) . РРэ(1.-Но-А-Г1к).
Оэмакс H(L-HoA-hMaKc)U
Таким образом, определена функция нижнего предела ширины изображения ковша для минимальной высоты зависания ЬМИн ковша над приемным сосудом мин (т) (или da мин (Но)) и аналогичная функция вер- /него предела ширины изображения ковша для максимальной высоты зависания Ьмакс ковша над приемным сосудом макс (т)
(ИЛИ da макс (Но)).
Прй управлении процессов разгрузки ковша с помощью изображения, формируемого телекамерой на стреле, машинист должен успеть среагировать на появление ковша на изображении на экране видеомонитора и произвести необходимые манипу- ляции с органами управления разгрузкой ковша. Если известна скорость VK транспортирования ковша в горизонтальной плоскости, то можно определить время tic, проходящее с момента вхождения ковша в поле зрения телекамеры, до момента начала опрокидывания ковша по формуле
У+Г/1
VK
где х расстояние по горизонтали между задней кромкой ковша в момент начала его опрокидывания и оптической осью телекамеры;
Р - расстояние, охватываемое полем зрения телекамеры вдоль линии транспортирования ковша в плоскости, проходящей через верхний срез ковша (фиг.3). ;.
Устанавливая время Тк равным времени tp, необходимым машинисту для оценки си- туации и принятия соответствующих мер по управлению ковшом, которое мы назовем временем реакции машиниста, имеем фдя поля зрения телекамеры
(VKtP-x).(14)
При этом предполагаем, что при транспортировании ковша расстояние между уровнем верхних кромок ковша и приемного сосуда равно
0
5
5
о
Q
5
0
5
п
5
, 1 1мин-(-Г1макс, Пмин-(-Г1макс Пк-- 7|ilk-я
где Ьмин и hMakc - минимально и максимально допустимые высоты зависания ковша над приемным сосудом (расстояния между уровнями верхних кромок ковша и приемного сосуда).
Если в момент начала опрокидывания ковша оптическая ось телекамеры проходит через середину ковша, тогда параметр Р равен
P 2VKtp-g где g - длина ковша (фиг.З).
Аналогично, если в момент начала опрокидывания ковша оптическая ось телекамеры проходит через режущую кромку ковша (фиг.З) параметр Р равен
(VKtP-g)
Параметр # , входящий в формулу (14), можно определить по подобию размеров изображения с размерами в натуре в плоскости, перпендикулярной оптической оси телекамеры и проходящей через верхний срез ковша при его транспортировании к месту разгрузки. В предложении, что расстояние между верхними срезами ковша и приемного сосуда равно hK (соответствие высоты зависания ковша над приемным сосудом), величину Ьк можно контролировать, например, по соотношению величины зазора между ковшами и приемным сосудом при зависании первого над вторым, и величины высоты приемного сосуда, можно записать для произвольного фокусного расстояния
-Ј
где D - ширина ковша
X и d3 - образы величин #и D на экране видеомонитора,
откудах Величина D известна х и da можно измерить на экране видеомонитора, например, с помощью линейки или нанесения на экран шкалы.
Следовательно, можно определить %.
Способ может быть реализован в следующем устройстве (фиг.2).
Экскаватор-драглайн содержит ковш 1, корпус со стрелой 2, поворотную платформу 3, тяговый канат 4, лебедку 5 тяги, подъемный канат б, лебедку 7 подьема видеомонитор 8, установленный в кабине машиниста, телекамеру 9, установленную на стреле над местом разгрузки, приемный сосуд 10, в который производится разгрузка горной массы. Экран видеомонитора оснащен приспособлением 11 для наведения. На фиг.4 изображен пульт 12 управления, определяющий возможность управления механизмом перефокусировки телекамеры.
На фиг.5 и 6 изображены приспособления для наведения, которыми оснащается экран видеомонитора. Прицельные приспо- собления содержат вертикальную линию 13, проходящую через центр экрана и совпадающую на изображении с осью стрелы, горизонтальную метку 14, совпадающую с изображением режущей кромки ковша в мо- мент начала его разгрузки, две пары вертикальных контрольных меток 15, расстояние между которыми равно da мин для ближних к центральной вертикальной линии меток и (Зэмакс для дальних к центральной вертикальной линии меток, вспомогательную горизонтальную линию 16.
Заметим, что может быть несколько различных вариантов выполнения приспособления для наведения (фиг.6) в зависимости отточки расположения телекамеры, направления визирования, фокусного расстояния объектива, размеров фотомишени телекамеры и экрана видеомонитора и т.п. На фиг.6 изображен случай, когда оптическая ось телекамеры привязана к центру масс ковша в момент начала его опрокидывания, и горизонтальная метка 14 находится в нижней части экрана. Фиг.6 соответствует случаю, когда оптическая ось телекамеры привязана к режущей кромке ковша в момент начала его опрокидывания. В этом случае горизонтальная метка совпадает со вспомогательной центральной горизонтальной линией 16. Попутно заметим, что для случая на фиг.6 параметр (VKtp- $ в формулах ОН13) будет равен
(VKtP-g)
Конструктивно приспособление наведения может быть выполнено, например, путем нанесения рисунка непосредственно на поверхности экрана видеомонитора красящими веществами с возможностью его последующего смывания (стирания), либо путем наложения на экран пленки с рисун- ком, или путем наложения рисунка из нитевидных материалов с фиксацией последних по периферии экрана, например, с помощью клеевых или изоляционных материалов, а также другими способами.
Способ загрузки транспортных средств экскаватором-драглайном осуществляют следующим образом.
Ковш 1 (фиг.1 и 2), наполненный грунтом, открывается от забоя, после чего кор- пус со стрелой 2 начинает поворачиваться вокруг поворотной платформы 3 к месту разгрузки. Одновременно ведется транспортирование ковша с грунтом в сторону конца стрелы за счет отпускания тягового каната
с барабана лебедки 5 тяги и наматывания подъемного каната 6 на барабан лебедки 7 подъема. Машинист драглайна по изображению на экране установленного в его кабине видеомонитора 8, формируемому установленной на стреле драглайна телекамерой 9, ожидает момента появления либо приемного сосуда 10, в который ведется разгрузка ковша, либо ковша при его подтягивании к концу стрелы. Если ковш появляется на экране раньше транспортного сосуда, машинист осуществляет останов его подтягивания до момента точной установки стрелы на место разгрузки. Установка стрелы на место разгрузки осуществляется сначала через стадию выбора места разгрузки по результатам визуальной оценки машиниста на экране степени загрузки внутренней полости транспортного сосуда 10,ча затем через стадию наведения стрелы на выбранное место разгрузки по совпадению центральной вертикальной линии 13 фиг.6), нанесенной на поверхности экрана видеомонитора, с серединой выбранного места разгрузки.
Одновременно с установкой стрелы над выбранным местом разгрузки машинист по совмещаемости изображения ближнего к нему борта транспортного сосуда с горизонтальной меткой 14, нанесенной на экране видеомонитора и определяющей положение режущей кромки ковша в момент начала его разгрузки, оценивает, насколько точно произойдет выгрузка содержимого ковша в транспортный сосуд.
Если ковш к моменту наведения и останова поворота стрелы не вошел в поле зрения телекамеры, машинист ожидает его появление на экране с целью непрерывного вывода к месту разгрузки. Если ковш вошел в поле зрения телекамеры до установки стрелы над местом разгрузки, и. его движение было остановлено, машинист прерывает останов ковша и продолжает процесс подтягивания ковша к месту разгрузки. Одновременно с подтягиванием вошедшего в поле зрения телекамеры ковша к месту разгрузки машинист осуществляет проверку нахождения ковша в допустимых пределах высоты его зависания над транспортным сосудом по вписываемое™ ширины ковша на изображении в промежуток, определяемый вертикальными метками 15, нанесенными на экране видеомонитора, и при необходимости осуществляет коррекцию высоты зависания ковша с помощью подъемного каната. Если высота зависания ковша находится в -допустимых пределах, машинист продолжает отпускать тяговый канат вплоть до начала опрокидывания ковша и перемещения его содержимого в транспортный сосуд. При этом в момент начала опрокидывания ковша (его можно идентифицировать с началом высыпания вынимаемой породы из ковша) его режущая кромка на изображении совмещается с нанесенной на экране горизонтальной меткой и ближним к машинисту бортом транспортного сосуда.
После разгрузки ковша в транспортный сосуд подъемная лебедка 7 начинает нама- тывать подъемный канат до тех пор, пока опрокинутый ковш не поднимется над транспортным сосудом на высоту, исключающую механический контакт между ними. После этого тяговый лебедкой начинает на- матываться тяговый канат, а стрела начинает посредством поворота выводить ковш из зоны разгрузки. В процессе работы машинист драглайна с помощью пульта 12 управления осуществляет фокусировку телекамеры. Фокусное расстояние объектива телекамеры выбирают из условий, описанных выше, что в конечном счете определяет производительность экскаватора-драглайна, так как включает все техниче- ские показатели технологической цепочки при наведении на место разгрузки. Формула изобретения Способ наблюдения за процессом загрузки приемных сосудов экскаватором- драглайном, включающий телевизионное наблюдение за перемещением ковша к приемному сосуду, установку ковша по телевизионному изображению в заданной зоне, и контроль перемещения горной массы в при-
емный сосуд, отличающийся тем, что, с целью повышения производительности экскаватора-драглайна за счет сокращения времени наведения ковша на место разгрузки при сохранении точности наведения, из- меряют высоту уступа расположения приемного сосуда Но относительно уровня земной поверхности, измеряют расстояние L от телевизионной камеры до уровня земной поверхности, измеряют длину х изображения расстояния, от оптической оси телевизионной камеры в пространстве объектов до задней кромки ковша в момент начала его опрокидывания, по изображению видеомонитора - размер ширины изображения ковша , задают размер ширины ковша D, высоту приемного сосуда А, максимальное Ьмакс и минимальное Ьмин допустимые расстояния между верхними срезами ковша и приемного сосуда в момент зависания ковша над приемным сосудом, линейное увеличение Гтелевизионной системы, линейный размер экрана по вертикали РЭ, скорость транспортирования ковша VK, время реакции машиниста tp, определяют фокусное расстояние объектива F по формуле
р-РЭг „ |0 д(Ьмакс+Ьмин)1
2r(Vktp-Dxd3)
Т
4
причем телевизионную камеру устанавливают на расстоянии, равном радиусу разгрузки ковша, а оптическую ось ее направляют вертикально вниз.
CO О О
(О
,// // f/ /jt Jf jf S/ // S/ // // // . / /S // // // S, -V SS SS ХУ //
1
УХ ..
У2
Of, -CR
8009 Ul
/Z4
&.
/J
Фиг.6
2
r
a.
Фиг. 7
| Способ загрузки транспортных средств экскаватором-драглайном | 1985 |
|
SU1308715A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Землеройная машина с автоматизированным наведением ковша на место разгрузки | 1988 |
|
SU1602947A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
