Ha основании полученных зависимостей оценивают расстояние- от конца стрелы до предполагаемого места установки телекамеры на стреле. Если взять в- качестве базового шагающий драглайн ЭЫ-13/50, для него ,5 м при длине стрелы 50 м. Длина приемного сосуда b равна длине железнодорожного думпкара, b 13 м, Приближенно ( max 0° Подставив значения 1, Ь, oi. гпах в формулы (3-4), получают
do - 30°, AFl 10,72 м.
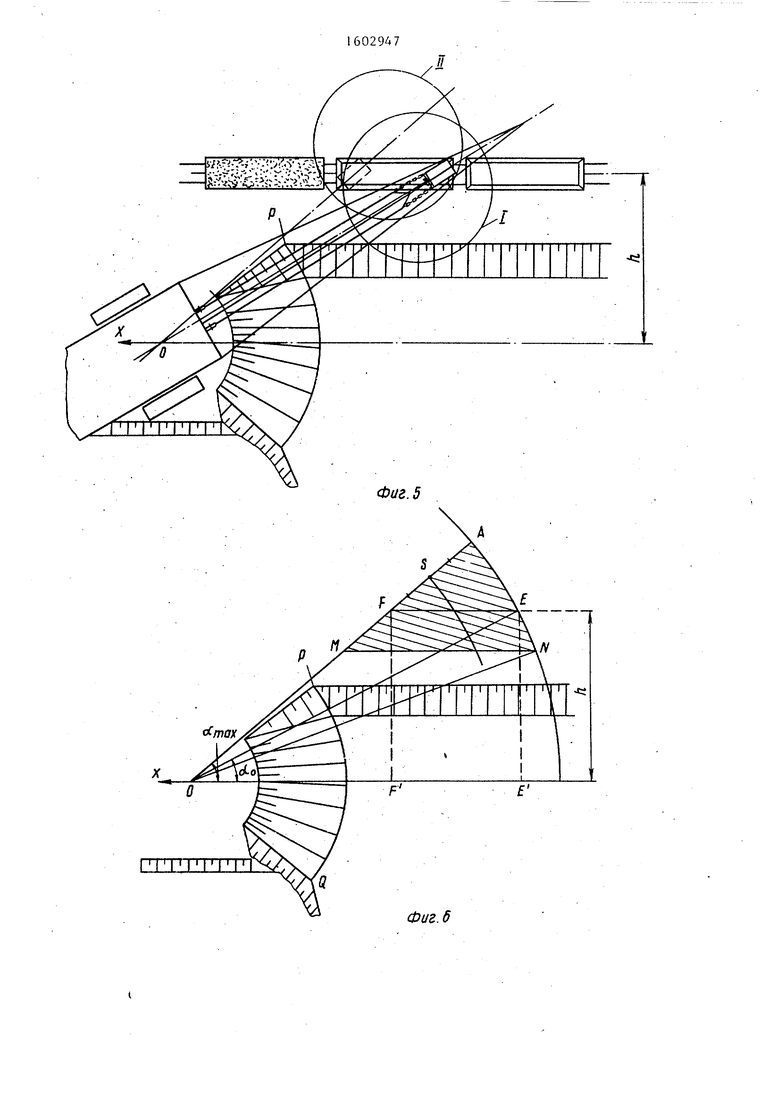
Таким оОразом, с учетом того, что максимальный радиус разгрузки несколько меньше длины вьшета стрелы, оцтимальной для данных соотношений, будет установка телекамеры на стреле на расстоянии 8,86 м от ее конца. Если для наведения на место разгрузки стрелы и ковша использовать телекамеру Г- с широкоугольным объективом, то ковш при разгрузке в пределах зон разгрузки заведомо попадает в ее пол зрения при направленной вертикально вниз оптической оси.Поэтому установку телекамеры на стреле можно производить в достаточно широких пределах допуска на ее удаленность от основания стрелы,которые для сделанных вычислений 0,82L от основания стрелы, где L - длина стрелы.
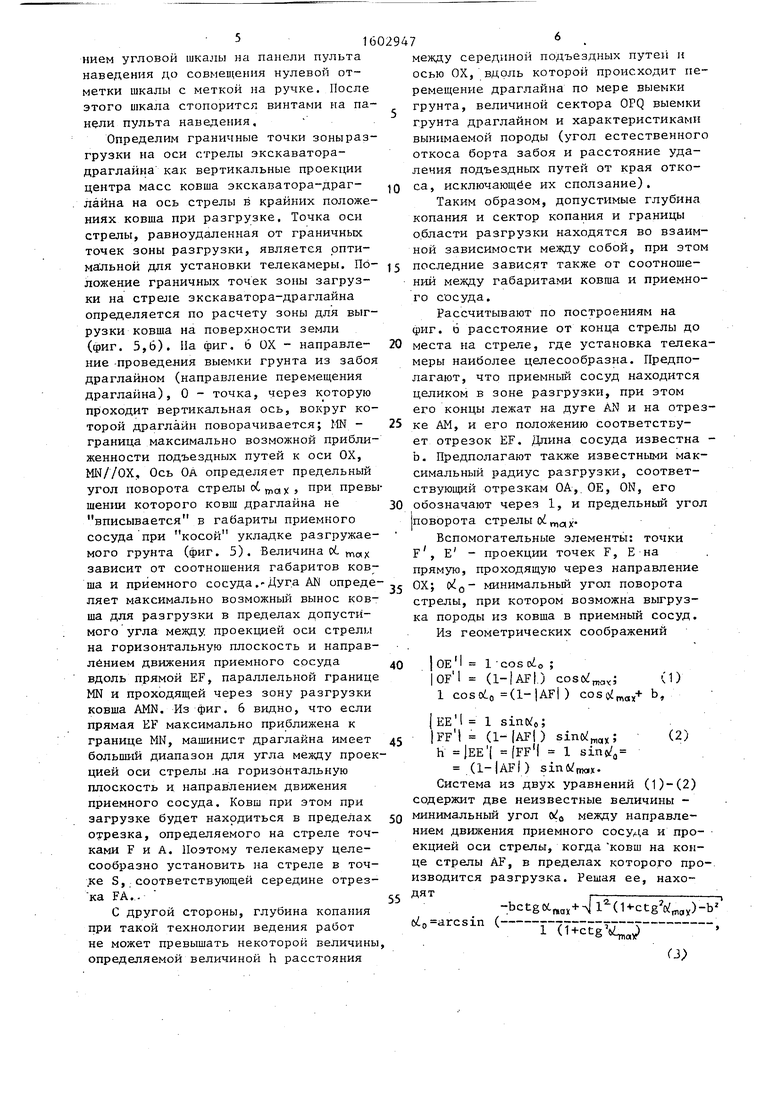
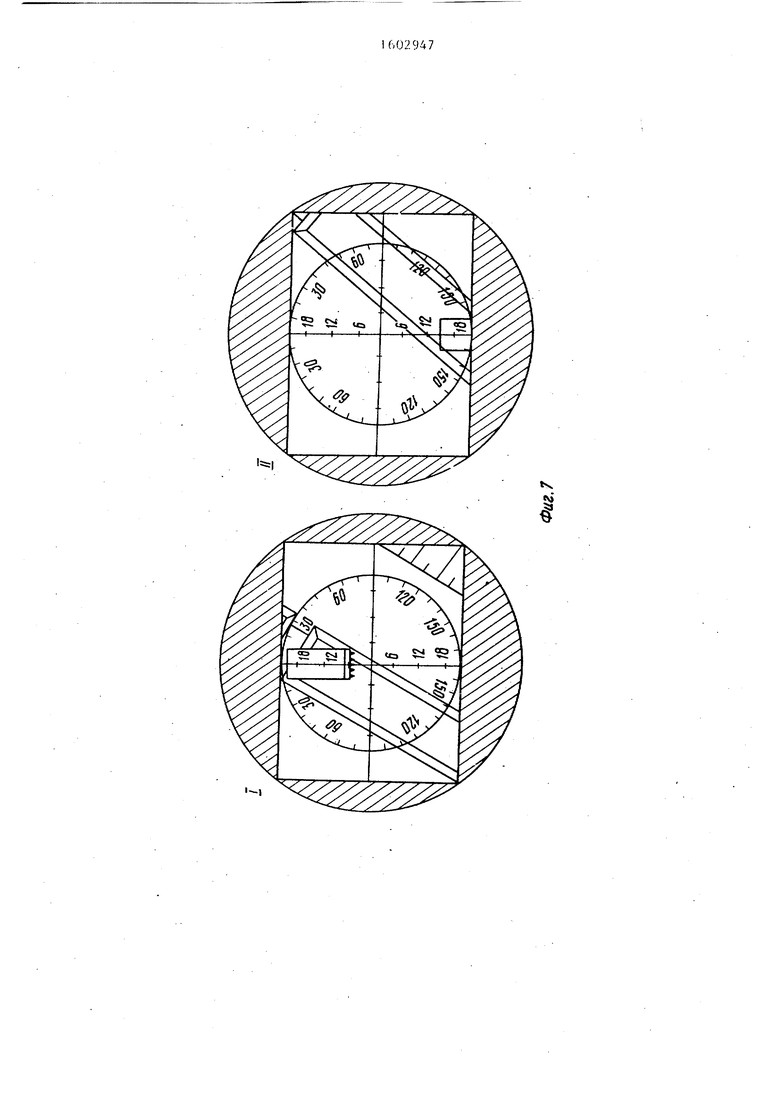
На фиг. 5 окружности I и II - поля зрения объектива телекамеры на
Аналогичным образом, зная габар ты и угловые размеры вагона или к ша, можно оценить расстояние до ни
уровне верхних кромок бортов вагонов при разных углах разворота драглайна. 40 Кроме того, расстояние до вагона. На фиг. 7 представлены изображения зная его высоту, можно определить на экране видеомонитора, соответствующие этим положениям телекамеры, при этом изображение на видеомониторе вы- . - рездет только часть поля зрения объек-45 тива. На фиг. 7 изображена также наложенная на изображение визирная сетка в виде двух перекрещивающихся в центре кадра под прямым углом линий с метками, соответствуюш ши углам отклонения направлений наблюдения телекамеры от направления, задаваемого оптической осью телекамеры, и угловая шкала, нанесенная по окружности с центром в точке пересечения визирных линирь С помощью этой визирной сетки и угловой шкалы машинист может определять на изображении видеомонитора расстояние от телекамеры до
путем вычитания этой высоты из ра стояния от камеры до путей.
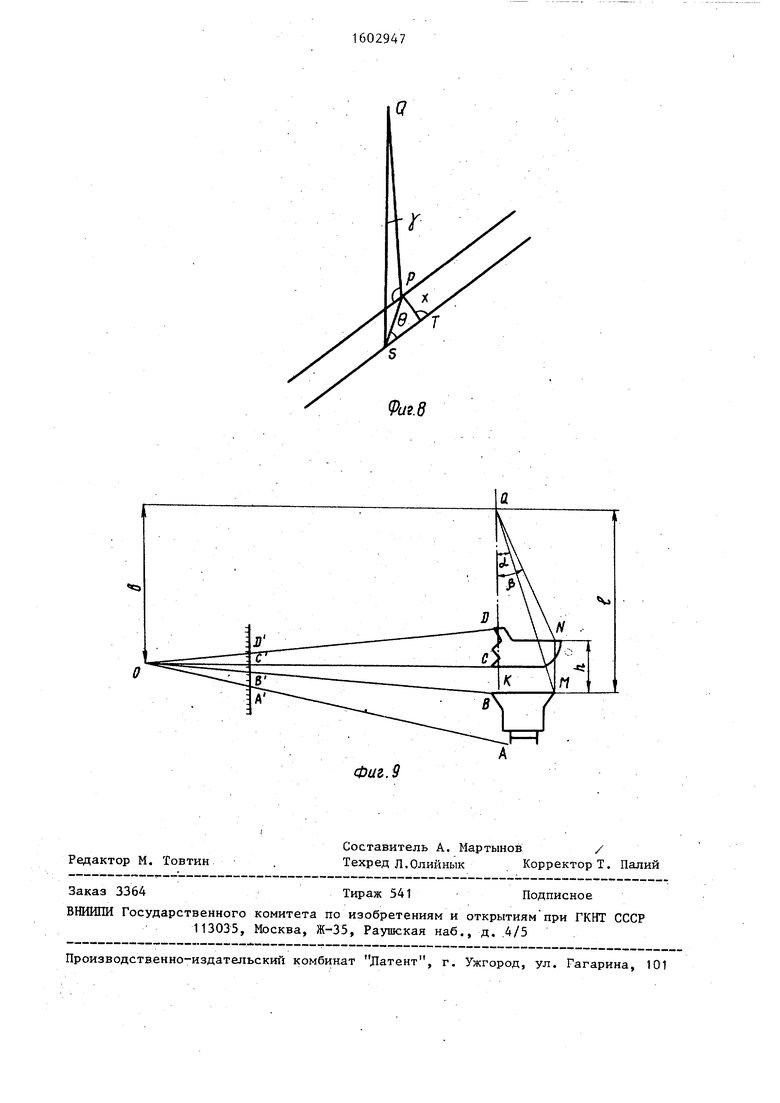
Точное приц&пивание.ковша драгл на на место разгрузки осуществляю следуюш м образом (фиг. 9). Стрел драглайна поворачивается в такое жение, чтобы вертикальная /линия в -зирной сетки на изображении на вид мониторе точно проходила через ме разгрузки. При этом на изображении засекают точку пересечения углово шкалы с бортом приемного сосуда ( ка М).и считьшают со шкалы зааченц угла oi , под которым телекамера дит выделенную точку. При зависа нагруженного породой ковша драгла над местом разгрузки точка N, выд
50
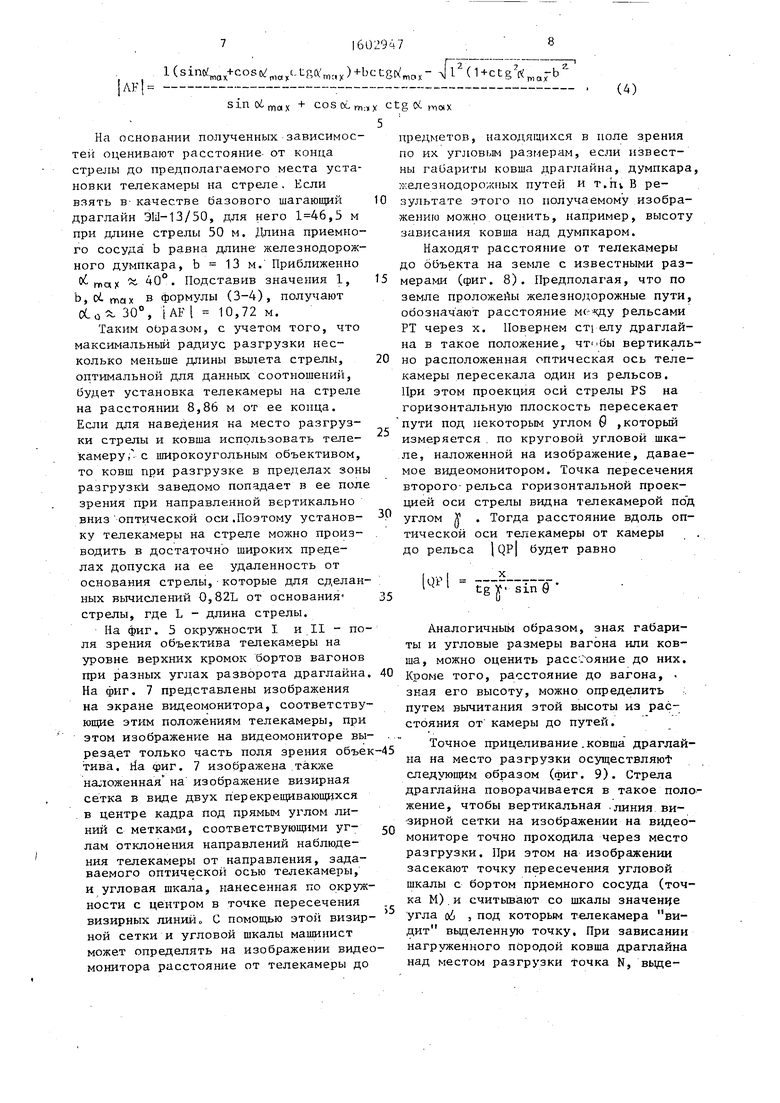
предметов, находящихся в поле зрения по их углов 1м разг.1ерам, если известны габариты ковша драглайна, думпкара, железнодорожных путей и т.hi В результате этого по получаемому изображению можно оценить, например, высоту зависания ковша над думпкаром.
Находят расстояние от телекамеры до объекта на земле с известными раз- мерами (фиг. 8). Предполагая, что по земле проложейы железнодорожные пути, обознач ают расстояние мееду рельсами РТ через X. Повернем CTI елу драглайна в такое положение, вертикально расположенная оптическая ось телекамеры пересекала один из рельсов. При этом проекция оси стрелы PS на горизонтальную плоскость пересекает пути под некоторым углом 9 ,который измеряется . по круговой угловой шкале, наложенной на изображение, даваемое видеомонитором. Точка пересечения второго-рельса горизонтальной проекцией оси стрелы видна телекамерой по д углом /у . Тогда расстояние вдоль оптической оси телекамеры от камеры . до рельса lQP| будет равно
iQ H HJ--Bin-Q
Аналогичным образом, зная габариты и угловые размеры вагона или ковша, можно оценить расстояние до них.
Кроме того, расстояние до вагона. зная его высоту, можно определить
0 Кроме того, расстояние до вагона. зная его высоту, можно определить . - 5 путем вычитания этой высоты из расстояния от камеры до путей.
Точное приц&пивание.ковша драглайна на место разгрузки осуществляют следуюш м образом (фиг. 9). Стрела драглайна поворачивается в такое положение, чтобы вертикальная /линия ви- -зирной сетки на изображении на видеомониторе точно проходила через место разгрузки. При этом на изображении засекают точку пересечения угловой шкалы с бортом приемного сосуда (точка М).и считьшают со шкалы зааченце угла oi , под которым телекамера видит выделенную точку. При зависании нагруженного породой ковша драглайна над местом разгрузки точка N, выде0
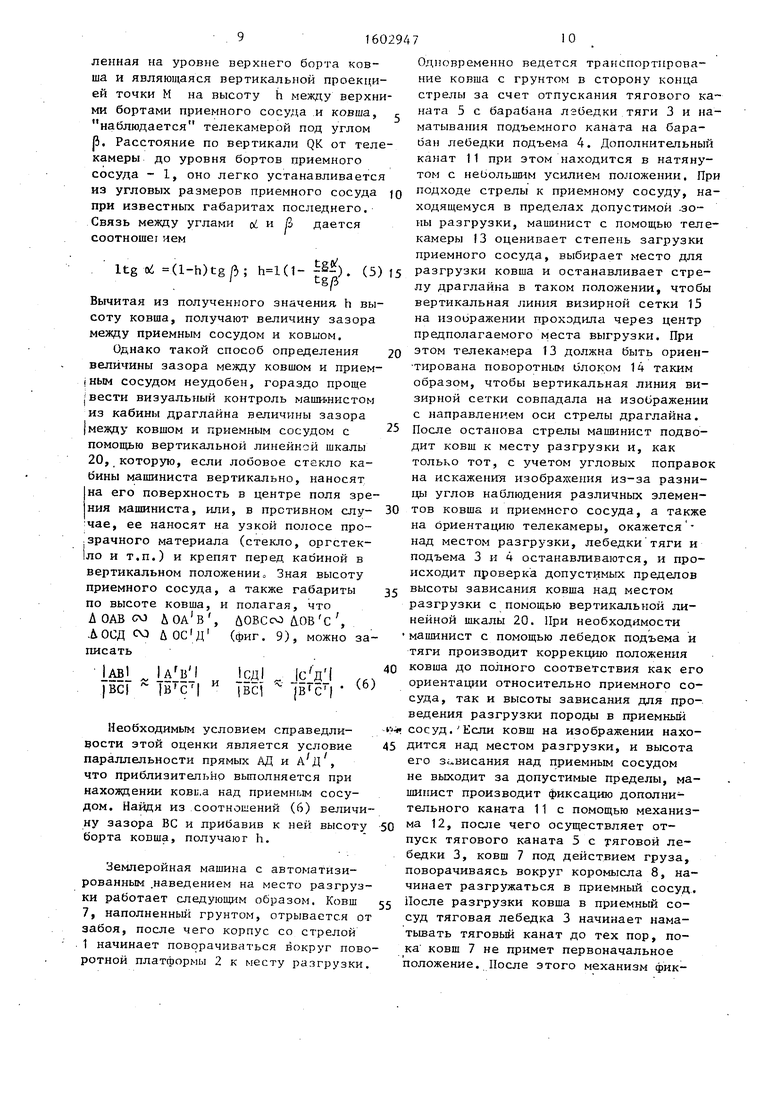
ленная на уровне верхнего борта ковша и являющаяся вертикальной проекцией точки М на высоту h между верхнми бортами приемного сосуда и ковша, наблюдается телекамерой под углом р. Расстояние по вертикали QK от телкамеры до уровня бортов приемного сосуда - 1, оно легко устанавливаетс из угловых размеров приемного сосуда при известных габаритах последнего. Связь между углами oi и и дается соотношег нем
Itg л: (l-h)tgp; (). (5
Вычитая из полученного значения h высоту ковша, получают величину зазора между приемным сосудом и ковшом.
Однако такой способ определения величины зазора мезвду ковшом и прием- jHbiM сосудом неудобен, гораздо проще I вести визуальный контроль маши-нистом из кабины драглайна величины зазора (между ковшом и приемным сосудом с помощью вертикальной линейной шкалы 20, которую, если лобовое стекло кабины машиниста вертикально, наносят на его поверхность в центре поля зрения машиниста, или, в противном елу- чае, ее наносят на узкой полосе прозрачного материала (стекло, оргстекло и т.п.) и крепят перед кабиной в вертикальном положении о Зная высоту приемного сосуда, а также габариты по высоте ковша, и полагая, что
А ОАВ СО ДОА В , йовссо дов с ,
ЛОСД CV) йОС д (фиг. 9), можно записать
IAB . IA B
|BC|
IB C
и ад -- |BCJ JB C I
(6)
Необходимым условием справедли- вости этой оценки является условие параллельности прямых АД и л д , что приблизительно выполняется при нахождении кови.а над приемным сосудом. Найдя из соотношений (6) величину зазора ВС и прибавив к ней высоту борта ковша, получают h,
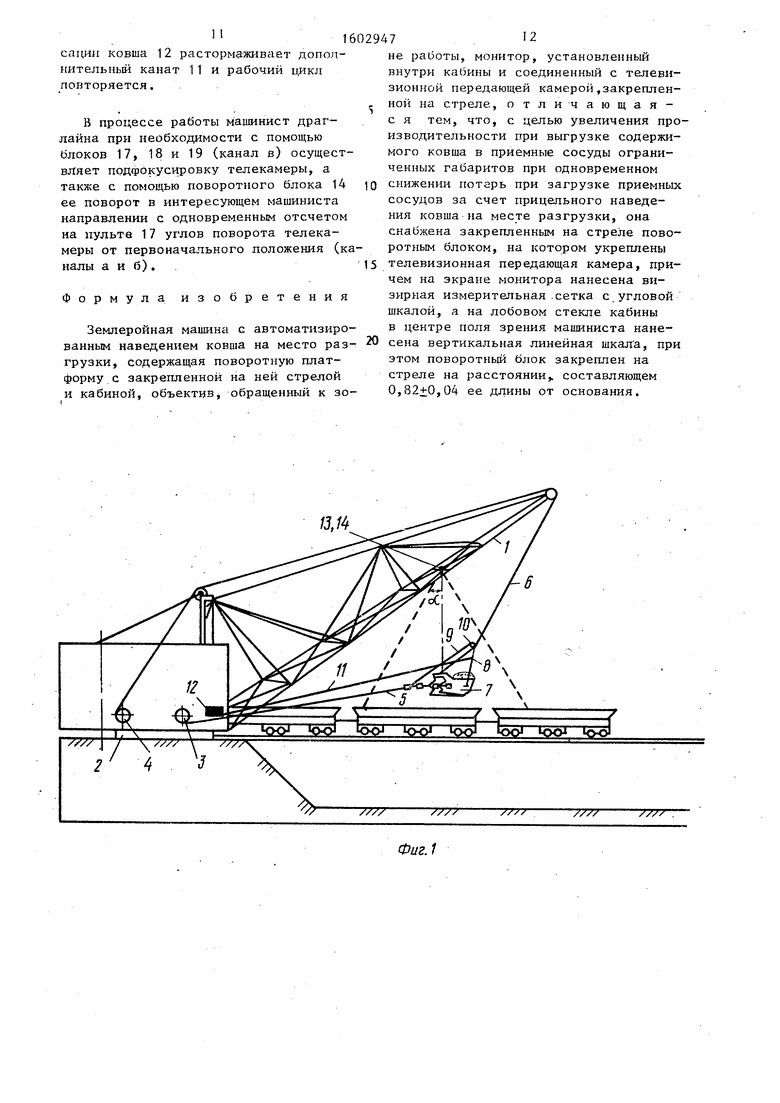
Землеройная машина с автоматизированным .наведением на место разгрузки работает следующим образом. Ковш 7, наполненньш грунтом, отрывается от забоя, после чего корпус со стрелой .1 начинает поворачиваться вокруг поворотной платформы 2 к месту разгрузки.
иея JQ
)15
20 - 5 3035
45 50
55
Одновременно ведется транспортирование ковша с грунтом в сторону конца стрелы за счет отпускания тягового каната 5 с барабана лэбедки тяги 3 и наматывания подъемного каната на барабан лебедки подъема 4. Дополнительный канат 11 при этом находится в натянутом с небольшим усилием положении. При подходе стрелы к приемному сосуду, находящемуся в пределах допустимой .зоны разгрузки, машинист с помощью телекамеры 13 оценивает степень загрузки приемного сосуда, выбирает место для разгрузки ковша и останавливает стрелу драглайна в таком положении, чтобы вертикальная линия визирной сетки 15 на изображении проходила через центр предполагаемого места выгрузки. При этом телекамера 13 должна быть ориен- тирована поворотным блоком 14 таким образом, чтобы вертикальная линия визирной сетки совпадала на изображении с направлением оси стрелы драглайна. После останова стрелы машинист подводит ковш к месту разгрузки и, как только тот, с учетом угловых поправок на искажения изобрахсения из-за разницы углов наблюдения различных элементов ковша и приемного сосуда, а также на ориентацию телекамеры, окажется - над местом разгрузки, лебедки тяги и подъема 3 и 4 останавливаются, и происходит проверка допустимых пределов высоты зависания ковша над местом разгрузки с помощью вертикальной линейной шкалы 20. При необходимости машинист с помощью лебедок подъема и тяги производит коррекцию положения ковша до полного соответствия как его ориентац11и относительно приемного сосуда, так и высоты зависания для проведения разгрузки породы в приемный сое уд. Если ковш на изображении находится над местом разгрузки, и высота его з; висания над приемным сосудом не выходит за допустимые пределы, машинист производит фиксацию дополнительного каната 11 с помощью механизма 12, после чего осуществляет отпуск тягового каната 5 с уяговой лебедки 3, ковш 7 под действием груза, поворачиваясь вокруг коромысла 8, начинает разгружаться в приемный сосуд. После разгрузки ковша в приемный сосуд тяговая лебедка 3 начинает нама- тьшать тяговый канат до тех пор, пока ковш 7 не примет первоначальное положение. После этого механизм фиксации ковша 12 растормаживает дополнительный канат 11 и рабочий цикл повторяется.
В процессе работы машинист драглайна при необходимости с помощью блоков 17, 18 и 19 (канал в) осуществляет прдфокусировку телекамеры, а также с помощью поворотного блока 14 ее поворот в интересующем машиниста направлении с одновременным отсчетом на пульте 17 углов поворота телекамеры от первоначального положения (каналы а и б) , .
Формула изобретения
Землеройная машина с автоматизированным наведением ковша на место разгрузки, содержащая поворотную платформу с закрепленной на ней стрелой и кабиной, объектив, обращенный к зо
не работы, монитор, установленный внутри кабины и соединенный с телевизионной передающей камерой,закрепленной на стреле, отличающая- с я тем, что, с целью увеличения производительности при выгрузке содержимого ковша в приемные сосуды ограниченных габаритов при одновременном снижении потерь при загрузке приемных сосудов за счет прицельного наведения ковша на месте разгрузки, она снабжена закрепленным на стреле поворотным блоком, на котором укреплены
телевизионная передающая камера, причем на экране монитора нанесена визирная измерительная .сетка с угловой шкалой, а на лобовом стекле кабины в центре поля зрения машиниста нанесена вертикальная линейная шкал а, при этом поворотный блок закреплен на стреле на расстоянии,, составляющем 0,82+0,04 ее длины от основания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ наблюдения за процессом загрузки приемных сосудов экскаватором-драглайном | 1989 |
|
SU1716008A1 |
| ПОГРУЗОЧНЫЙ ЭКСКАВАТОР-ДРАГЛАЙН | 2010 |
|
RU2431719C1 |
| Способ загрузки транспортных средств экскаватором-драглайном | 1990 |
|
SU1752694A1 |
| Перегрузочный пункт скальной породы в карьере | 1990 |
|
SU1765414A1 |
| Экскаватор-драглайн | 1990 |
|
SU1728394A1 |
| ПОГРУЗОЧНЫЙ ЭКСКАВАТОР-ДРАГЛАЙН | 1994 |
|
RU2079609C1 |
| ПОГРУЗОЧНЫЙ ЭКСКАВАТОР-ДРАГЛАЙН | 2000 |
|
RU2186178C1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1987 |
|
SU1502723A1 |
| Способ контроля угла откоса при использовании драглайна | 1983 |
|
SU1162904A1 |
| Бункер для загрузки вагонов | 1984 |
|
SU1194805A1 |
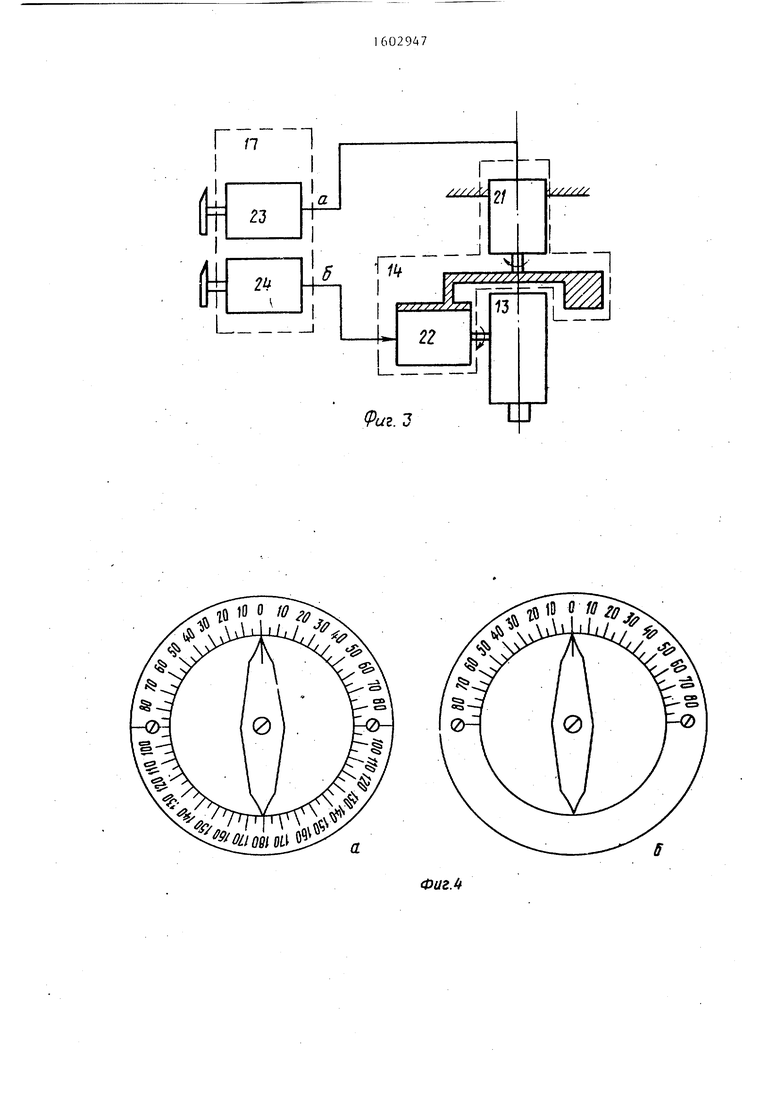
Изобретение относится к автоматизированному управлению экскаваторами-драглайнами. Цель изобретения - увеличение производительности при выгрузке содержимого ковша в приемные сосуды ограниченных габаритов при одновременном снижении потерь при загрузке приемных сосудов за счет прицельного наведения стрелы и ковша на место разгрузки. На поворотной платформе машины закреплена стрела и кабина. На стреле на расстоянии 0,82±0,04 ее длины от основания устанавливается поворотный блок 14 с дистанционным управлением, на который крепится передающая телевизионная камера 13. Внутри кабины машиниста установлен соединенный с камерой 13 телевизионный монитор 16, на экране которого нанесена визирная измерительная сетка 15 с угловой шкалой. На лобовом стекле кабины в центре поля зрения машиниста нанесена вертикальная линейная шкала 20. Прицельное наведение ковша в заданную точку осуществляется машинистом путем контроля положения ковша 7 по экрану телевизионного монитора 16 /в горизонтальной плоскости/ и по вертикальной линейной шкале 20 /в вертикальной плоскости/. 9 ил.
Д/4
Фаг.:5
IJ
Фаг.
V I ч I I I I
X
Фиг. 5
Фиг. 6
:
9at8
| Рабочее оборудование землеройной машины | 1982 |
|
SU1270226A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
