Изобре.тение относится к электротехнике и может быть использовано при разработке качественных систем управления частотно-регулируемыми асин- хронными двигателями, а также в тех случаях, когда имеется необходимость измерить момент, создаваемый асинхронным двигателем.
Цель изобретения - повышение точности, расширение области применения и повышение технологичности.
На фиг.1 приведена функциональная схема предложенного устройства; на фиг. 2 - то же, блока дпя определения по- .токосцепления ротора; на фиг.З - то
же, блока для определение гладких составляющих тока.
Устройство для измерения пульсаций момента (фиг.1) содержит датчики 1 фазных токов И датчики 2 фазных напряжейий, выходы которых соединены с первым входом блока 3 интеграторов, первая группа выходов которого соединена с одним из входом блока 4 умножения, вторая группа которого соединена с выходами блока 5 определения гладких составляющих тока, на первый вход которого подается сигнал задания полного тока двигателя, а на второй вход - сигнал задания частоты вращения,
В устройство для измерения пульса- ций момента введены логический блок 6 блок 7 для определения реальных с ост- тавляюпргх тока, блок 8 умножения и сумматор 9. Выходы датчиков 1 фазных токов соединены с логическим блоком 6 и первым входом блока 7 для определения реальных составляющих тока. Вто- рой вход блока 5 для определения гладких составляющих тока соединен с вторым входом блока 3 интеграторов, а первый выход логического блока 6 соединен с третьим входом блока 5 для определения гладких составляющих тока и с третьим входом блока 3 интегратора. Второй выход логического блока 6 соединен с вторым входом блока 7 ДД1Я определения реальных составляющих токов, с четвертым входом блока 5 для определения гладких составляющих тока и с четвертым входом блока 3 интеграторов. Третий выход логического блока 6 соединен с i-peTbHM входом блока 7 для определения реальных составляющих токов, выходы которого соединены с пятым и шестым входом блока 3 интеграторов, две группы входов которого соединены с входом блока В умножения, а выходы блоков 4 и умножения соединены с сумматором 9, выход которого образует выход устрой- . ства.
Блок 3 интеграторов , логический блок 6 и блок 7 для определения реальных составляющ1-1х тока образуют блок 10 для определения потокосцепления ротора, имеющий шесть выходов и три вхо50
да. По-первому и второму,выходам оп1- 55
ределяются составляющие потокосцепле- ния ротора, по третьему и четвертому - определяются составляющие реального
0
Q 5 0
5
0
5
0
5
тока, а по пятому и шестому - определяются логические сигналы.
Блок 10 определения потокосцепле- ния ротора имеет три входа. На первый вход подаются сигналы фазных токов, на второй вход - сигналы фазных напряжений, а на третий вход - сигнал задания частоты вращения.
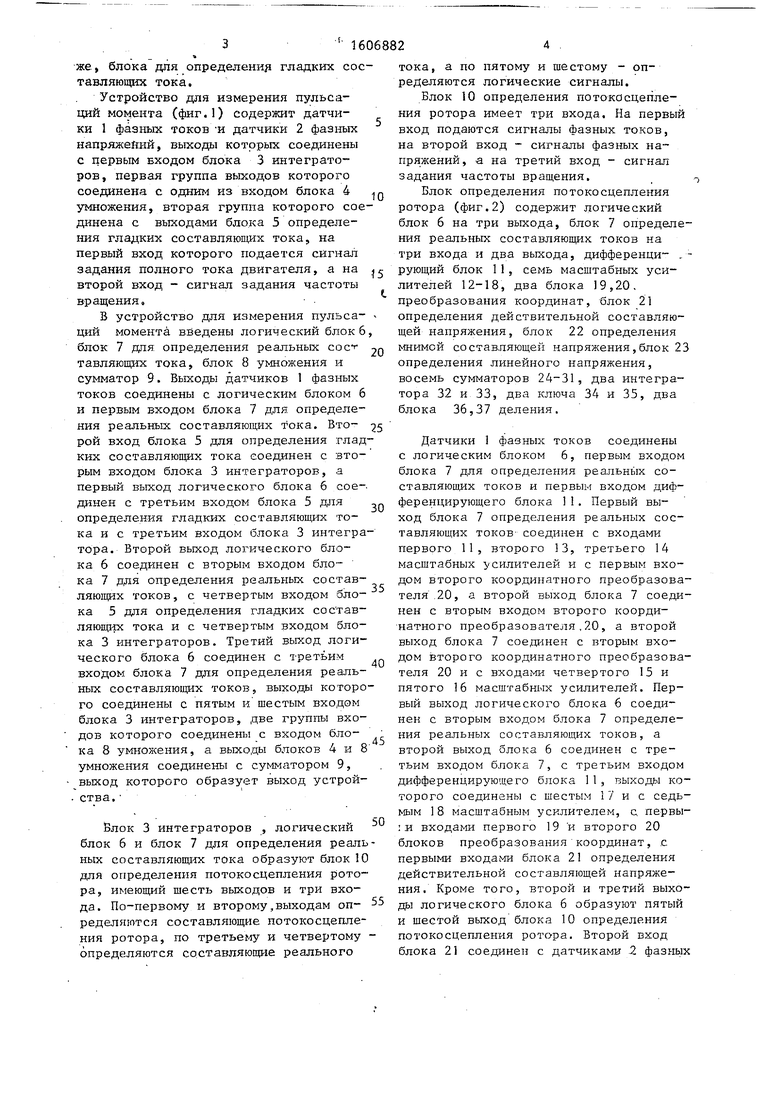
Блок определения потокосцепления ротора (фиг.2) содержит логический блок б на три выхода, блок 7 определения реальных составляющих токов на три входа и два выхода, дифференци- .- рующий блок 11, семь масштабных усилителей 12-18, два блока 19,20. преобразования координат, блок 21 определения действительной составляющей напряжения, блок 22 определения мнимой составляющей напряжения,блок 23 определения линейного напряжения, восемь сумматоров 24-31, два интегратора 32 и 33, два ключа 34 и 35, два блока 36,37 деления.
Датчики 1 фазных токов соединены с логическим блоком 6, первым входом блока 7 для определения реальньк составляющих токов и первым входом дифференцирующего блока 11. Первый выход блока 7 определения реальных составляющих токов- соединен с входами первого 11, второго 13, третьего 14 масштабных усилителей и с первым входом второго координатного преобразователя,20, а второй выход блока 7 соединен с вторым входом второго координатного преобразователя,20, а второй выход блока 7 соединен с вторым входом второго координатного преобразователя 20 и с входами четвертого 15 и пятого 16 масштабных усилителей. Первый выход логического блока 6 соединен с вторым входом блока 7 определения реальных составляющих токов, а второй выход блока 6 соединен с третьим входом блока 7, с третьим входом дифференцирующего блока 11, выходы которого соединены с шестым 17 и с седьмым 18 масштабным усилителем, с первы- :и входами первого 19 и второго 20 блоков преобразования координат, с первыми входами блока 21 определения действительной составляющей напряжения. Кроме того, второй и третий выходы логического блока 6 образуют пятый и шестой выход блока 10 определения потокосцепления ротора. Второй вход блока 21 соединен с датчиками 2 фазных
напряжений непосредственно, а второй вход блока 22 соединен с датчиками 2 фазных напряжений через блок 23 опреного преобразователя 19, первый выход которого соединен с первым входом седьмого сумматора 30, второй вход




| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод | 1988 |
|
SU1605307A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1986 |
|
SU1398061A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1453574A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Частотно-управляемый электропривод | 1986 |
|
SU1372581A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1985 |
|
SU1283929A1 |
| Устройство для определения скольжения асинхронного двигателя | 1989 |
|
SU1720137A1 |
| Устройство для определения координат асинхронного двигателя регулируемого электропривода | 1986 |
|
SU1403323A1 |
| Устройство для определения параметров трехфазной асинхронной машины | 1969 |
|
SU553949A3 |
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |

Изобретение относится к электротехнике и может быть использовано при разработке качественных систем управления частотно-регулируемыми асинхронными двигателями, а также в тех случаях, когда имеется необходимость измерить момент, создаваемый асинхронными двигателями. Цель изобретения - повышение точности. Поставленная цель достигается тем, что в устройство введены логический блок на три входа, блок для определения реальных составляющих тока на три входа, блок умножения и сумматор, причем выходы датчиков фазных токов соединены с логическим блоком и первым входом блока для определения реальных составляющих тока, а второй вход блока для определения гладких составляющих тока соединен с вторым входом блока интеграторов, а первый выход логического блока соединен с третьим входом блока для определения гладких составляющих тока и с третьим входом блока интеграторов, а второй выход логического блока соединен с вторым входом блока для определения реальных составляющих тока, с четвертым входом блока для определения гладких составляющих тока с четвертым входом блока интеграторов, а третий выход логического блока соединен с третьим входом блока для определения реальных составляющих тока, выходы которого соединены с пятым и шестым входами блока интеграторов и с одним из входов введенного блока умножения, второй вход которого соединен с выходом блока интеграторов, а выход блока умножения соединен с сумматором, выход которого образует выход устройства. 1 з.п. ф-лы, 3 ил.
деления линейных напряжений. Выход бло-. которого соединен с выходом третьего
ка 21 определения действительной составляющей напряжение соединен с первым, сумматором 24, второй вход, которого соединен с выходом первого масштабно- ,го усилителя 12, а третий зход - с :вьпсодом шестого масштабного усилите- ля 17, а выход первого сумматора 24 соединен с входом первого интеграто ра 32, первого ключа 34 и первым входом первого блока 36 деления. Выход блока 22 определения мнимой составляющей напряжения соединен с первым входом второго делителя 37, с входом второго сумматора 25, второй вход которого соединен с выходом четвертого масштабного усилителя .15, а третий вход - с выходом седьмого масштабного усилителя 18, а выход второго сумматора 25 соединен с входом второго инсумматора 26, а второй выход координатного преобразователя 19 соединен первым входом восьмого сумматора 31, второй вход которого соединен с выхо
10 дом четвертого сумматора 27. Выход сумматоров 29 и 30 образуют первый и второй выход блока 10 определения по- токосцепления, по которому определя- :.ются составляющие по то ко сцепления ро
15 тора в опорной системе координат, а выходы второго координатного преобра зователя 20 образуют третий и четвер тый выход блока 10 определения пото- косцепления, по которому определяютс
20 составляющие тока в опорной системе координат.
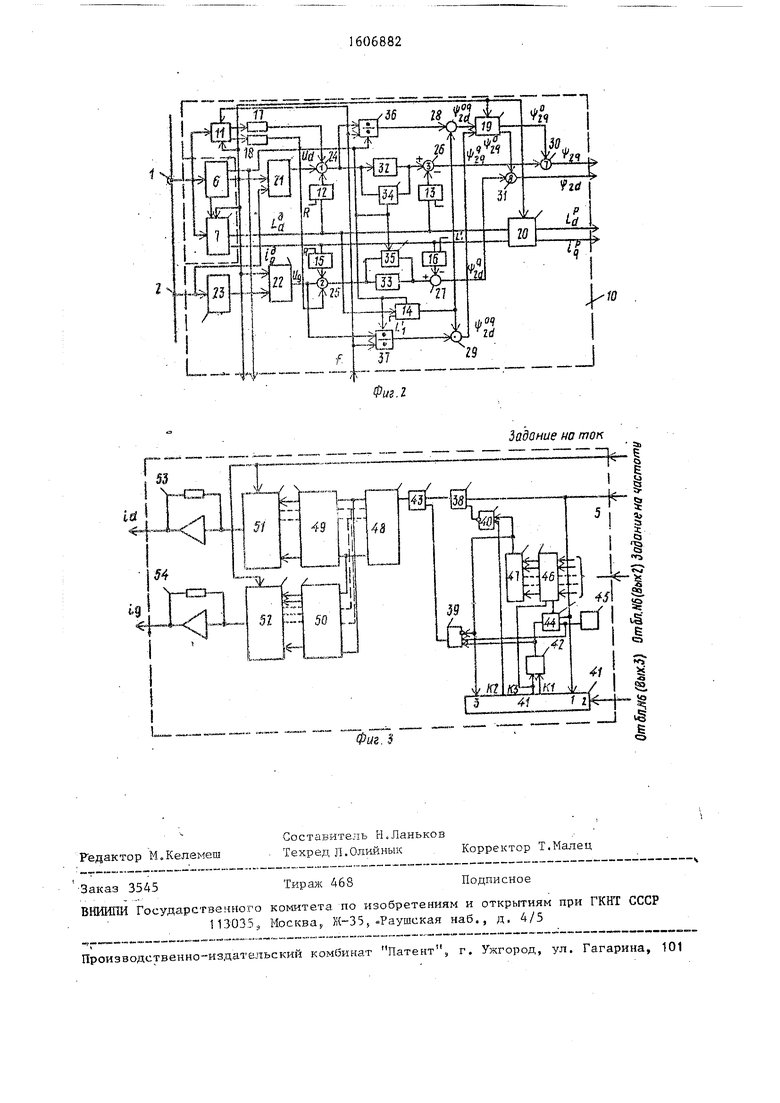
Блок 5 определения гладких состав ляющих токов (фиг.З) содержит три эл мента И 38-40 блок 41 управления, дв
тегратора 33, второго ключа 35. то- 25 элемента ИЖ 42 .и 43, коммутатор 44,
рые входы первого 36 и второго 37 , блоков деления и второй вход дифференцирующего блока 11 объединены и образуют третий вход блока 10 определения потокосцепления, по которому подается сигнал, пропорциональный частоте вращения.
Выходы первого интегратора 32 и . первого ключа 34 объединены и соеди нены с входом третьего сумматора 26, . второй вход которого соединен с выходом второго масштабного усилителя 13. Выхода второго интегратора 33 и второго ключа 35 объединены и соединены с входом четвертого сумматора 27, второй вход которого соединен с выходом пятого масштабного усилителя 16. Третий выход логического блока 6 соединен с упревляющим входом первого 34 и второго 35 ключей, пер.вого 36 и второго 37 блоков деления и третьего масштабного усилителя 14. Выход.первого блока 36 деления соединен с входом пятого сумматора 28, второй вход которого объединен с вторым входом шестого сумматора 29 и соединен с выходом третьего масштабного усилителя 14, а первый вход шестого сумматора 29 соединен с выходом
.второго блока 37 деления. Выход пя того сумматора 28 соединен с вторым входом координатного преобразователя 19, а. выход шестого сумматора 29
.соединен с третьим входом координатвысокочастотный генератор 45, блок 46 ключей, счетчик 47, блок 48 делителей на два, генератор 49 функций Уолша для аппроксимации косинусоидальных
30 функций, генератор 50 функций Уолша для аппроксимации синусоидальных функ ций, два блока 51 и 52 аналоговых клю чей, два сумматора 53 и 54. Частотный сигнал, oпpeдeляющIiй задание на
jr частоту вращения гладкой составляющей тока 5, который соединен с первым входом первого элемента И 38, с пер- вым входом коммутатора 44 и с первым входом блока 41 управления, первый и
40 третий выходы которого через первый элемент ИЛИ 42 соединен с первым входом второго элемента И 39 и управляющим входом коммутатора 44, второй вход которого соединен с выходом ге45 нератора 45 и вторым входом второго элемента И 39. Кроме того, третий выход К.З блока 41 управления соеди- . пен с единичным управляюш 1М входом блока 46 ключей. Выход коммутатора 4
50 соединен с информационными входами блока 46 ключей, управляющие входы которого соединены с вторым выходом логического блока 7, третий выход которого соединен с вторым входом бло55 ка 41 управления. Выходы блока 46 ключей соединены с входами счетчика 47, выход которого соединен с третьим входом второго элемента И 39, с третьим входом блока 41 управления
сумматора 26, а второй выход координатного преобразователя 19 соединен с первым входом восьмого сумматора 31, второй вход которого соединен с выходом четвертого сумматора 27. Выход сумматоров 29 и 30 образуют первый и второй выход блока 10 определения по- токосцепления, по которому определя- :.ются составляющие по то ко сцепления ро тора в опорной системе координат, а выходы второго координатного преобразователя 20 образуют третий и четвертый выход блока 10 определения пото- косцепления, по которому определяются
составляющие тока в опорной системе координат.
Блок 5 определения гладких составляющих токов (фиг.З) содержит три элемента И 38-40 блок 41 управления, два
элемента ИЖ 42 .и 43, коммутатор 44,
высокочастотный генератор 45, блок 46 ключей, счетчик 47, блок 48 делителей на два, генератор 49 функций Уолша для аппроксимации косинусоидальных
функций, генератор 50 функций Уолша для аппроксимации синусоидальных функций, два блока 51 и 52 аналоговых ключей, два сумматора 53 и 54. Частотный сигнал, oпpeдeляющIiй задание на
частоту вращения гладкой составляющей тока 5, который соединен с первым входом первого элемента И 38, с пер- вым входом коммутатора 44 и с первым входом блока 41 управления, первый и
третий выходы которого через первый элемент ИЛИ 42 соединен с первым входом второго элемента И 39 и управяющим входом коммутатора 44, второй вход которого соединен с выходом генератора 45 и вторым входом второго элемента И 39. Кроме того, третий выход К.З блока 41 управления соеди- пен с единичным управляюш 1М входом блока 46 ключей. Выход коммутатора 44
соединен с информационными входами блока 46 ключей, управляющие входы которого соединены с вторым выходом огического блока 7, третий выход которого соединен с вторым входом блока 41 управления. Выходы блока 46 ключей соединены с входами счетчика 47, выход которого соединен с третьим входом второго элемента И 39, с третьим входом блока 41 управления
и с первым входом третьего элемента И 40, второй вход которого соединен с вторым выходом блока 41 управления. Выход третьего элемента И 40 со- единен с вторым входом первого элемента И 38, выход которого соединен с первым входом второго элемента ИЛИ 43 а второй вход которого соединен с выходом второго элемента И 39, а р выход второго элемента ИЛИ 43 нен с входом блока 48 делителей на два.
Устройство для измерений пульсаций момента асинхронного двигателя работа- 5 ет следующим образом,.
Асинхронный двигатель получает питание от автономного инвертора. Фаз- ные токи измеряются да тчиками 1 тока, а фазные напряжения - датчика- 20 ми 2 фазных напряжений. Сигналы с выхода датчиков 1 тока подаются .на логический блок 6,дифференцирующий блок 11 и блок 7 определения проекций токов. В блоке 6 формируются линейные 25 токи (выход 1), логические сигналы (выход 2) и выход 3.
По фазным и линейным токам (выход 1 блока 6) под действием уп равляюш;их импульсов (выход для бло-. 30 ка 6) блок 7 определения проекций токов формирует реальные составляющие тока в допустимой системе координат. Будем считать для конкретности, что опорной является фаза А, а положение 35 результирующего вектора отсчитывается относительно этой фазы. Тогда на выходе блока 7 определения проекций токов появляются сигналы, которые подаются на первый 12, второй 13, тре-40 тий 14, четвертый 15, пятый 16 масштабные усилители и второй координатный преобразователь 20. В то же время блок 6 по знакам фазных токов формирует логические сигналы, которые 45 подаются на управляющие входы первого 19 и второго 20 координатных пре- образователей, в блок 21 определе.ния действительной составляющей напряжения, блок . 22 определения мнимой сое-. 50 тавляющей напряжений и блок 7 определения проекций токов.
Сигналы с выхода датчика 2 фазных напряжений подаются в блок 27 определения линейных напряжений и в блок 21 55 определения действительных составляющих напряжения, а таюке в блок, на выходе которого по логическим сигна- лам блока 6 формируется действительная составляющая напряжения, которая подается на вход первого сумматора 24. Сигнал с выхода блока 23 подается на блок 22 определения линейной составляющей .напряжения, на выходе которого под действием управляющего .сигналов логическо1 о блока форми- руется мнимая сост авхшющая напряже- НИИ, которая подается на второй сумматор 25 и первый вход второго делителя ЗУ.
В дифференцирующем блоке 11 определяется модуль вектора тока,.а затем модуль дифференцируется и умножается на гармонические функции, синтез которых целесообразно осуществить на функциях Уолша, что позволяет процесс синтеза гармонических функций и процесс умнол ения объединить в одном блоке. По приходу логического сигнала с выхода блока 6 начинается процесс синтеза гармонических функций с одновременным умножением этих функций на производство тока. В на-., сштабном усилителе iS выходной сигнал дифференцирующего блока 11 умно- ..жается на коэффициент и на выходе сумматора 24 появляется сигнал, который подается на вход перв.ого интегратора 32 и первого делителя 36.
Выходной сигнал подается на вход второго делителя 36 и на первый.вход сумматора 25, на второй вход которого подается сигнал с выхода масштабного усилителя 19. Таким образом, на выходе сумматора 24 появляется сигнал, который подается на вход второго интегратора 32.
При появлении управляющего импульса на третьем выходе логического бло- ;ка 6 ключи 33 и 34 размыкаются и начинается процесс интегрирования, т.е. идет процесс определения проекций потокосцеплений в допустимой системе координат.
Для определения потокосцепления в опорной системе координат необходимо осуществить поворот допустимой Системы координат на заданный угол, поворот на заданный угол определяется логическими сигналами с второго выхода логического блока 6.
Как только результирующий вектор совпадает с одной из допустимых осе координат, на выходе лJгичecкoгo блока 6 появляется импульс, по котором не только размыкаются ключи 33 и 34 но и определяются начальные условия.
Для перевода начальных условий к опорной, системе координат служат бло ки 19 и 20 преобразования координат, которые осуществляют преобразование парка. Блок 19 преобразования коорди нат преобразует к опорной системе ко ординат вектор потокосцепления, а блок 20 - вектор тока, В отличие от известных введенные координатные пр образователи осуществляют дискретные повороты векторов потокосцепления и тока на фиксированный угол. Выбор угла зависит от логических сигналов. Таким образом, на первом выходе координатного преобразователя 19 появляется сигнал, который поступает на один из входов сумматора 30. На втором выходе координатного преобразователя 19 появляется сигнал, который в сумматоре 31 суммируется, что позволяет на выходе сумматоров 30 и 31 получать проекции вектора потокосцепления в опорной системе координат. Выход сумматоров 30 и 31 образует первые два выхода блока 10, выходы преобразователя координат 20 образуют третий и четвертый выход блокг 10 определения потокосцепления, а на выходе координатного преобразователя 20 получают проекции ректора тока в опорной системе координат.
На первый вход элемента И 38, на первый вход управляющего блока 4J и на первый вход коммутатора 44 подается частотный сигнал, пропорциональный частоте вращения. Выход коммутатора 44 соединен с информационными входами блока 46 ключей, на управляющие входы которого подается сигнал с-второго выхода логйческ(И о блока 6, а на второй вход блока 41 управления подается сигнал с третьего выхода логического блока 6. По приходу первого импульса с логического блока б и по приходу импульса частотного сигнала на выходе блока 4 управления по каналам 1 и 2 выдаются управляющие импульсы. Канал 2 подготавливает к срабатыванию третий элемент И 40, а канал 1 через элемент 1-ШИ 42 1юдключает высокочастотный генератор 45 через соответствующий ключ блока 46 ключей :на заполнение счетчи ка 47. На время .заполнения счетчика уррлвляющий сигнал с выхода генератора 45 через элемент ИЛИ 43 поступает на блок 48 деления частоты на два. При этом происходит выбор допустимой системы
15
25
-,„ -,(
30
35
40
45
50
5
координат, так как емкость счетчика, определяемая сигналами с блока 6, согласована с углом поворота допустимой системы координат, т.е. емкость одного блока счетчика соответствует числу импульсов, которые поворачивают синтезированный вектор на 60 эл.град. Если, например, при включении системы регулирования реальный вектор тока находился между 180 и 240 эл.град., то на входе блока ключей действует сигнал, который вводит четыре блока, и синтезированный вектор тока поворачивается на 240 эл.град. (идет реальный вектор тока). Так как счетчик 47 заполнился, на его выходе появился имПульс, инверсным сигналом которого закрывается элемент И 39, а инверсным сигналом элемента И 40 закрывается элемент И 38, Таким образом, импульсы на вход блока 48 делителей не поступают (осуществилась грубая синхронизация) . .
При действии следующего импульса емкость счетчика 46 увеличивается на постоянную величину, а на выходе счетчика 47 снова появляется нулевой сигнал. Меняется управляющий сигнал, коммутатора 44 и счетчик 46 начинает .заполняться частотой, более низкой, чем частота генератора. При этом может быть три варианта: счетчик заполняется раньше, чем кончился управляющий сигнал, счетчик не успел заполниться . на время действия yri- равляющего сигнала и сш налы закончились одновременно.
Первый вариант означает, что син- . тезированный вектор тока опережает реальный. В этом случае на выходе счетчика 47 появляется импульс, который совместно с импульсом по каналу 2 через третий элемент И 40 закрывает первый элемент И 38 и -частотный сигнал не поступает в схему формирования гармонических функций, и вращение синтезированного вектора тока прекращается.
Второй вариант, означает, что синтезированный вектор тока отстает от реального. Тогда за.время действия управляющего сигнала по каналу 2 с выходя счетчика 47 по входу 3 блока 4 управления не поступил сигнал, подтверждающий заполнение счетчика 47. В этом случае блок 41 управления после окончания очередного сигп
11606882
12
/нала по каналу К2 формирует сигнал по каналу 3, который блокирует состояние блока 46 ключей, а коммутатор 44 вновь подключает генератор к , счетчику, и высокал частота через элементы И 39 и ИЛИ 43 подается на вход блока делителей на два. Элег мент И 39 будет открыт на время до заполнения счетчика 47. Так как син- д тез гармонических сигналов осуществляется от высокочастотной последовательности импульсов, то синтёзиров;зн- ный вектор тока догоняет реальный. Как только счетчик 47 заполнится, на 15 его выходе появился импульс, который закрьш элемент И 39 и снял действие .управляющего сигнала КЗ, что увеличи- : ло емкость счетчика 46 . и переключи.по коммутатор на следующую позицию. Вре- 20 мя действия сигнала по каналу КЗ переменное и зависит от. времени дозапол- нения счетчика.
но тока и на выходе этого блока появляется составляющая пульсирующая момента, в блоке 4 умножения осуществляется умножение проекций вектора потокосцепления на проекции вектора гладкого тока и на выходе этого блока появляется сигнал, пропорциональный- гладкой составляющей момента. В сумматоре 9 осуществляется алгебраическое . суммирование выходных бйгналов блоков 4 и 8 на выходе блока 9 появляется сигнал, пропорциональный пульса- дии момента.
Данное устройство предназначено дпя использования его в качестве датчиков в частотно-регулируемом приводе.
Формула
изобретения
30
35
деления гладких составляющих токов на четыре входа, первый блок умножения, причем выходы датчиков фазных напряжений Соединены с первым входом блока интеграторов, первая группа выходов которого соединена с одним из входов блока умножения, вторая группа входов которого соединена с выхода ми блока для определения гладких составляющих тока на четыре входа, на
с выхода блока 48 поступает на вход блоков 49 и 50. В блоке 49 из последовательности импульсов синтезируются функции Уолша, которые используются дпя аппроксимации косинусоидальных колебаний, в бло ке 50 - синтезируются функции Уолша, которые используются для аппроксимации синусоидальных колебаний. В блоках 51 и 52 синтезиГ ГиГ.:.ГГсГ.р
:- ji Е::,; :: :: второй блок умножения и сумпервый вход которого подается сигнал задания полного тока двигателя, а на второй вход - сигнал задания частоты вращения, отличающееся
Таким образом, на выходе усилителей 53 и 54 появится проекция тока, опреде- ляемые гладкой составляющей тока
(первой гармоникой), амплитуда которой определяется сигналом задания полного
. тока, а фаза определяется фазой реального тока.
Таким образом, первые и вторые выхода блока 10 определения потокосцепления определяют составляющие вектора потокосцепления, а третий и четвертый выходы определяют составляющие реального тока в опорной системе
координат.
В блоке 8 умножения осуществляет- ся умножение проекций вектора потоко- ёцепления на проекции вектора регшьно45
входа,
матор, причем выходы датчиков токов соединены с логическим блоком и первым входом блока для определения реальных составляющих тока, а пер вый выход логического блока соединен
50 с третьим входом блока для определе- ния гладких составляющих тока и с третьим входом блока интеграторов, а второй выход логического блока соединен с вторым входом блока для опре„ деления реальных составляющих тока, с четвертым входом блока для определе ния гладких составляющих тока, с четвертым входом блока интеграторов, а третий выход логического блока соеди12
но тока и на выходе этого блока появляется составляющая пульсирующая момента, в блоке 4 умножения осуществляется умножение проекций вектора потокосцепления на проекции вектора гладкого тока и на выходе этого блока появляется сигнал, пропорциональный- гладкой составляющей момента. В сумматоре 9 осуществляется алгебраическое суммирование выходных бйгналов блоков 4 и 8 на выходе блока 9 появляется сигнал, пропорциональный пульса- дии момента.
Данное устройство предназначено дпя использования его в качестве датчиков в частотно-регулируемом приводе
Формула
изобретения
торов на шесть входов, блок для опрё-
деления гладких составляющих токов на четыре входа, первый блок умножения, причем выходы датчиков фазных напряжений Соединены с первым входом блока интеграторов, первая группа выходов которого соединена с одним из входов блока умножения, вторая группа входов которого соединена с выходами блока для определения гладких составляющих тока на четыре входа, на
первый вход которого подается сигнал задания полного тока двигателя, а на второй вход - сигнал задания частоты вращения, отличающееся
второй блок умножения и сум
входа,
матор, причем выходы датчиков токов соединены с логическим блоком и первым входом блока для определения реальных составляющих тока, а первый выход логического блока соединен
с третьим входом блока для определе- ния гладких составляющих тока и с третьим входом блока интеграторов, а второй выход логического блока сое . динен с вторым входом блока для определения реальных составляющих тока, с четвертым входом блока для определения гладких составляющих тока, с четвертым входом блока интеграторов, а третий выход логического блока соеди15
20
нен с третьим входом блока для определения реальных составляющих тока и с вторыми входами блоков определения реальных составляющих тока и оп- с ределеиия гладких составляюп х тока, которого соединены с пятым, и шестым входами блока интеграторов, первая и вторая группы выходов которого соединены с входами второго блока Ю умножения, а выходы блока умножения соединены с сумматором, выход которого образует выход устройства.
Элементом ИЛИ, выход которого соединен с первым входом второго элемен- та И и управляющим входом коммутато-
ра, второй вход которого соеди-нен с выходом генератора и с вторым входом
второго элемента И, а выход коммутатора соединен с информационным входом
25
блока ключей, ердничный управляющий вход которого соединен с третьим выходом блока управления, а информационные входы ключей являются входом блока для определения гладких составляющих тока, а выходил блока ключей соединены с входа ш счетчика, выход которого соединен с третьим входом второго элемента И, с третьим входом блока управления и с первым входом третьего элемента И, второй вход которого соединен с )вторым входом блока управления, а выход третьего элемента И соединен с вторым входом первого элемента И, выход которого соединен с первым входом второго элемента ИЛИ,второй вход которого соединен с выходом второго И, а выход второго элемента ИШ соединен с входом блока делителя на два, выход которого соединен с входом, генераторов функций Уолша для ко синусоидальных и синусоидальных функций, а выходы гененатора функций Уолша для косинусоидальных функций через первый блок заданий весовых коэффициентов соединены с входами первого сумматора, а выход генег ратора функций Уолша для синусоидальных функций, через второй блок задания весовых коэффициентов соединен с входом второго сумматора, первый вход блока для определения гладких составляющих тока соединен с одним из входов первого и вто рого блоков задания весовых коэффициентов, второй вход блока управления является четвертым входом блока для определения гладких составляющих тока.
Г JET
L
J
Задание на ток
| Частотно-регулируемый электропривод переменного тока | 1980 |
|
SU892635A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
