Изобретение относится к электротехнике и системам управления частотно-регулируемых электроприводов, и может быть использовано для определе- ния скольжения асинхронного двигатели на основе анализа электромагнитных процессов.
Цель изобретения - повышение точности определения скольжения асинх- ронного двигателя.
На фиг.1 представлена функциональная схема устройства для определения скольжения асинхронного двигателя; на фиг.2 и 3 - векторная диаграмма двигателя.
Устройство для определения скольжения асинхронного двигателя содержит блок 1 датчиков фазных токов, блок 2 датчиков фазных напряжений, блоки 3 и ч определения действительной и мнимой составляющих напряжения, нуль- орган 5, управляемый ключ 6, блок 7 преобразования координат напряжения с тремя входами и двумя выходами, че- тыре вычитателя 8-11, два блока 12 и 13 деления, два преобразователя 1 и 15, реализующие функцию арктангенса, и три масштабных усилителя 16-18.
Два выхода блока 1 датчиков фазных токов подключены к входам нуль-органа 5, соединенного выходом с управляющим входом управляемого ключа 6. Первый коммутируемый вывод ключа 6 предназначен для подачи управляющих импульсов, а второй подключен к первому входу блока 7 преобразования координат напряжения, второй вход которого соединен с выходом блока 3 определения действительной составляющей нап- ряжения, а третий вход - с выходом блока k определения мнимой составляющей напряжения. Входы блока пофазно объединены с соответствующими входами блока 3 и подключены к первым доум выходам блока 2 датчиков фазных напряжений, третий выход которого соединен с соответствующим входом блока 3 определения действительной составляющей напряжения.
Входы масштабных усилителей l6-l8 объединены между собой. Первый выход блока 7 преобразования координат напряжения соединен с первым входом вы- читателя 8, второй вход которого сое- динен с выходом масштабного усилителя 1б.
Второй выход блока 7 преобразования координат напряжения соединен с
первыми входами вычитателей 9 и 10, выходы которых подключены к первым входам блоков 12 и 13 деления соответственно. Выходы последних подключены соответственно через преобразователи 14 и 15, реагирующие функцию арктангенса, к входам вычитателя 11, выход которого образует выход устройства .
В устройство для определения скольжения введены блоки 19 и 20 определения действительной и мнимой составляющих тока, блок 21 преобразования координат тока с тремя входами два блока 22 и 23 умножения, дифференцирующий блок 2, четвертый масштабный усилитель 25 и пятый вычита- тель 26.
Входы блоков 19 и 20 пофазно объединены между собой и подключены к первым двум выходам блока 1 датчико фазных токов, третий выход которого подключен к соответствующему входу блока 19 определения действительной составляющей тока.
Первый вход блока 21 преобразования координат тока объединен с первыми входами блоков 22 и 23 умножения и подключен к второму коммутируемому выводу управляемого ключа 6. Второй и третий входы блока 21 преобразования координат тока подключены соответственно к выходам блоков 19 и 20 определения действительной и мнимой составляющих тока, а выход блока 21 соединен с объединенными входами масштабных усилителей l6-l8 и входом дифференцирующего блока 2, подключенного выходом к входу масштабного усилителя 25.
Вторые входы блоков 22 и 23 умножения подключены соответственно к выходам масштабных усилителей 17 и 18, а выходы - соответственно к вторым входам вычитателей 9 и 10.
Выход вычитателя 8 подключен к первому входу вычитателя 26, соединенного вторым входом с выходом масштабного усилителя 25, а выход вычитателя 26 соединен с вторыми входами блоков 12 и 13 деления.
В блоке 7 преобразования координа напряжения из последовательности импульсов f, вырабатываемой системой управления частотно-регулируемым приводом для регулирования частотой инвертора (импульсы поступают на вход ключа), синтезируются гармонические
51
функции и осуществляется переход измеренных составляющих напряжения статора во Езращающуюся систему координат, действительная ось которой совпадает с вектором тока статора.
Блок 21 преобразования координат тока из той же последовательности импульсов f синтезирует те же гармонические функции и осуществляет переход составляющих тока статора во вращающуюся систему координат.
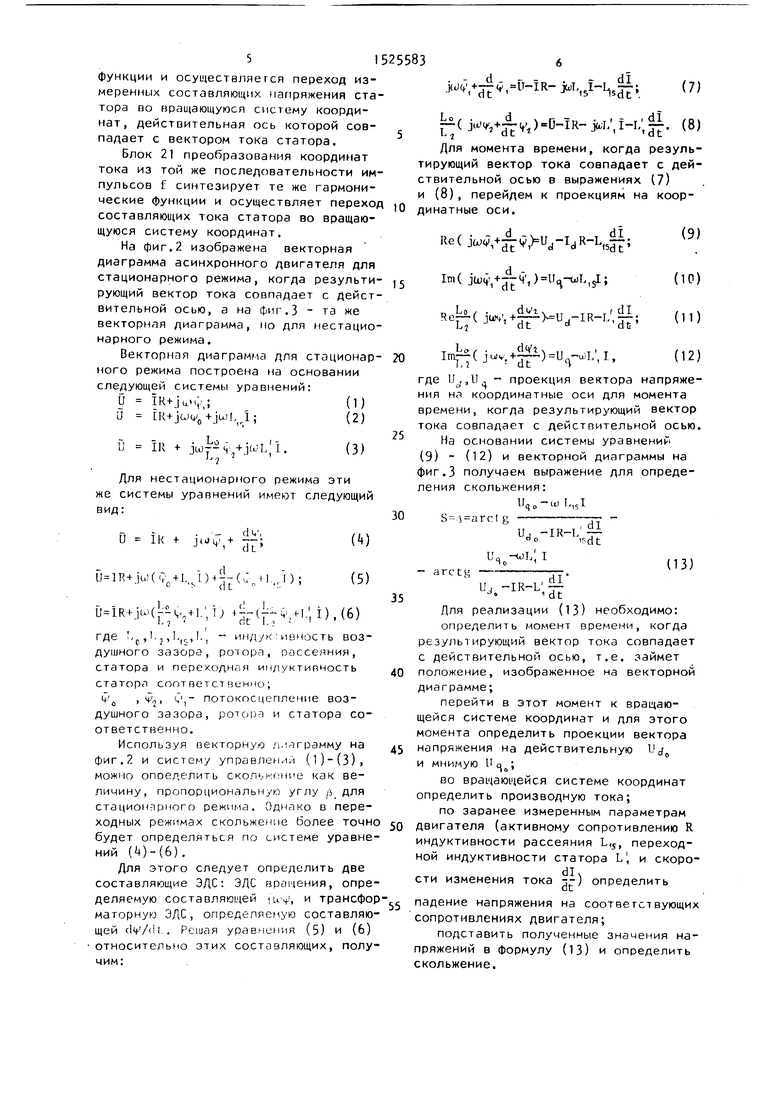
На фиг.2 изображена векторная диаграмма асинхронного двигателя для стационарного режима, когда результи- рующий вектор тока совпадает с Действительной осью, а на фиг.З - та же векторная диаграмма, но для нестационарного режима.
Векторная диаграмма для стационарного режима построена на основании следующей системы уравнений:
О IR+jun--;
О fR+jwVo-t-jwL J;
(1) (2)
IR + jwi -V/jt Lli. ь
(3)
Для нестационарного режима эти же системы уравнений имеют следующий вид:
О 1К 4. ;(4)
+ ju)( V + L/I)(,/F) ; (5)
(.;T) tjj-(.;i),(6)
где r,,,,,.,,,/, - индук ивность воздушного зазора, ротора, рассеяния, статора и переходная индуктивность статорл соответственно; , V,, С , потокосцепление воздушного зазора, ротс)|)-:з и статора соответственно.
Используя векторную д.ктграмму на фиг.2 и систему управлений (1)-(3), можно определить сколькение как величину, пропорциональную углу / i для стационарного режима. Однако в перепо заранее измеренным параметрам
ходных режимах скольжение более точно 50 двигателя (активному сопротивлению R
индуктивности рассеяния L,, переходной индуктивности статора L и скоробудет определяться по системе уравнений ()-(б).
Для этого следует определить две составляющие ЭДС: ЭДС вращения, определяемую составляющей {ич , и трансфор- , маторную ЭДС, определяемую составляющей dv/(it . Решая уравнения (5) и (6) относительно этих составляющих, получим:
dl, сти изменения тока -:-) определить
падение напряжения на соответствующих сопротивлениях двигателя;
подставить полученные значения напряжений в формулу (13) и определить скольжение.
j(.,v,u--iR- JwL,, (7)
( ,V.)0-IR- L i-L ,fi. (8)
Для момента времени, когда результирующий вектор тока совпадает с действительной осью в выражениях (7) и (8) , перейдем к проекциям на координатные оси.
Re(,V,U,-I, Im( ja)(,))L,5l;
Re
L,
dvi.
dT
(Mv -bu -iR-i.;,
f d dt
LO , , ч ., ,T I т
( j u,v, +) и,-шТ., I,
(9)
(10) (11) (12)
5
0
где Uj,lK - проекция вектора напряжения на координатные оси для момента времени, когда результирующий вектор тока совпадает с действительной осью.
На основании системы уравнений (9) - (12) и векторной диаграммы на фиг.З получаем выражение для определения скольжения:
UqO -U) L,;
S g
и.
-iR-i;
isdt
- arctg
ьч.
u..-iR-Ч
(13)
Для реализации (13) необходимо:
определить момент времени, когда резулыирующий вектор тока совпадает с действительной осью, т.е. займет положение, изображенное на векторной диаграмме;
перейти в этот момент к вращающейся системе координат и для этого момента определить проекции вектора напряжения на действительную Uj и мнимую I Q
во вращающейся системе координат определить производную тока;
по заранее измеренным параметрам
двигателя (активному сопротивлению R
dl, сти изменения тока -:-) определить
падение напряжения на соответствующих сопротивлениях двигателя;
подставить полученные значения напряжений в формулу (13) и определить скольжение.
Устройство для определения скольжения асинхронного двигателя работает следующим образом.
По шинам А, В, С напряжение подается к асинхронному двигателю. Фазные токи измеряются блоком 1, а фазные напряжения - блоком 2.
Сигналы с выходов блока 2 подаются в блок 3 определения действительной составляющей напряжения и в блок определения мнимой составляющей напряжения.
В блоке 3 по фазным напряжениям фаз А, В и С формируется сигнал и,, а в блоке 4 по фазным напряжениям фаз В и С - сигнал U (проекция результирующего вектора тока на мнимую ось). Выходные сигналы блока 1 фаз В и С подаются на нуль-орган 5 и блок 20 для определения мнимой составляющей тока la (проекции результирующего вектора тока на мнимую ось), л выходные сигналы блока 1 фаз А, F- и Г подаются на блок 19 для определс ния действительной составляющей тока L (проекции результирующего вектора тока на действительную ось).
В момент перехода линейного тока igt через нуль на выходе нуль-органа 5 появляется сигнал, который на время, равное периоду или нескольким периодам, открывают ключ 6 и импульсы, кратные частоте управления инвертором, начинают поступать на входы блока 7 преобразования координат напряжения, блока 21 преобразования координат тока и блоков 22 и 23 умножения. Так как ключ 6 открывается, когда линейный ток фаз В и С проходит через нуль, осуществляется синхронизация работы устройства с положением вращающегося вектора тока. Для повышения точности синхронизации частота импульсов, поступающий на ключ 6,
должна значительно (два-три порядка) ( превосходить частоту, подаваемую на
двигатель. Так как блоки 7 и 21 преобразования координат относительно просто выполнить на функциях Уолша, то между частотой питания двигателя fq и частотой f, подаваемой на ключ 6, целесообразно выполнить соотношение:
f 32 -lOf J- 32 .
На первый вход блоков 7 и 21 подается последовательность импульсов, на второй вход блока 7 подается сигнал и d, а на третий вход - сигнал Ucj,
5
0
5
0
5
(аналогично на второй пход блока 21 подается сигнал ij, а па третий вход - сигнал 1„).
В блоках 7 и 21 осуществляется переход к вращающейся системе координат согласно преобразованиям (1арка:
Uj Ujcos2T t+lJcv sin2 rft;| , .
U -Ujsin2«f:t+U cos2lfft j.
Ha первом выходе блока 7 преобразования координат появляется сигнал и I ,а на втором - сигнал U,, ,
о г
Ьлок /1 осуществляет переход по вращающуюся систему координат вектора тока. Так как переход осуществляется тогда, когда вектор тока совпадает с действительной осью, то блок 21 имеет один выход, т.е. (I модуль результирующего вектора тока).
Сигналы с выходов блока 21 преобразования координат тока подаются нп масштабные блоки l6-l3 и дифферешш- рующий блок . В первом масштобиом блоке 1б модуль тока, поступающий с выхода блока 21, умножйсгся на активное сопротивление R, во втором масштабном блоке 17 на индуктивность рассеяния статора L,,a в третьем масштабном бпоке 18 - на переходную индуктивность статора Т/,.
В дифференцирующем блоке 2 t осуществляется дифференцирование модуля тока. Выходные сигналы масштабных блоков 17 и 18 подаются на один из входов блоков 22 и 23 умножения соответственно, другие входы которых подключены к выходу ключа 6.
В блоках 22 и 23 умножения выходной сигнал масштабных усилителей 17 и 18 умножается на частоту, что позволяет на выходе блока 22 получить сигнал, пропорциональный t .,.;, а на выходе блока 23 - сигнал, пропорциональный . Выходной сигнал дифференцирующего блока 24 подается на масштабный блок 25, в котором умножается на L , что позволяет получить
0
5
величине
сигнал, пропорциональный
df
На первом выходе блока 7 преобразования координат появляется сигнал Uj., который подается на вычитатель 8, на второй вход которого подается сигнал IR.
На выходе вычитателя 8 появляется сигнал (UJ-IR), который подается на вычитатеЛь 26, На второй вход которого подается сигнал L ,dI./Gt, что позволяет на выходе вычитатепя 26 сформировать сигнал (UJ -IR-L , dl/dt), который подается на вторые входы делителей 12 и 13.
На втором выходе блока 7 преобразования координат появляется сигнал U( , который подается на первые входы вычитателей 9 и 10.
На второй вход вычитателя 9 подается сигнал шЦ, что позволяет получить на выходе вычитателя сигнал () , который подается на первый вход первого делителя 12.
На второй вход вычитателя 10 подается сигнал u, l/,I, что позволяет получить на выходе вычитателя сигнал (и (, -td/j I), который подается на первый вход второго делителя 13.
В первом блоке 12 деления осуществляется деление согласно первому члену выражения (13), а во втором блоке 13 деления - согласно второму члену выражения (13).
В блоках 14 и 15 осуществляется функциональное преобразование функции арктангенса.
Блок 12 позволяет определить фазовый сдвиг вектора jwy, а блок 13 - фазовый сдвиг вектора j w ч относительно вектора тока. Выходные сигналы функциональных преобразователей k и 15 подаются на входы вычитателя 11, которы11 позволяет определить фазовый сдвиг вектора jaji,i относительно вектора jwvj.
На выходе вычитателя 11 появляется сигнал, пропорциональный скольжению.
Таким образом, введение в устройство для определения скольжения асинхронного двигателя блоков определения действительной и мнимой составляющих тока, блока преобразов;тния координат тока, двух блоков умножения, диффе- ренцирукзцего блока дополнительного масштабного усилителя и дополнительного вычитателя обеспечивает в сравнении с известным решением возможность более точного опрелелеиия скольжения не только в стационарных режимах, но и 3 переходных при изменяющемся модуле тока статора на основе анализа электромагнитных процессов в двигателе и без применения таходат- чика.
Формула изобретения Устройство для определения скольжения асинхронного двигателя, содержа
5
0
5
0
5
0
5
0
5
щее блок датчиков фазных токов, блок датчиков фазных напряжений, блоки определения действительной и мнимой составляющих напряжения, нуль-орган, управляемый ключ, блок преобразования координат напряжения с тремя входами и двумя выходами, четыре вычитателя, два блока делений, два преобразователя, реализующие функцию арктангенса, и три масштабных усилителя, при этом первые два выхода блока датчиков фаз-, ных токов подключены к входам нуль- органа, соединенного выходом с управляющим входом управляемого ключа, первый коммутируемый вывод которого предназначен для подачи управляющих импульсов, а второй подключен к первому входу блока преобразования координат напряжения, второй вход которого соединен с выходом блока определения действительной составляющей напряжения, третий вход которого соединен с выходом блока определения мнимой составляющей напряжения, входы которого пофазно объединены с соответствующими входами блока определения действительно составляющей напряжения и подключены к первым двум выходам блока датчиков, фазных напряжений, третий выход которого соединен с соответствующим входом блока определения действительной составляющей напряжения, входы масштабных усилителей объединены между собой, первый выход блока преобразования координат напряжения соединен с первым входом первого вычитателя, второй вход которого соединен с выходом первого масштабного усилителя, второй выход блока преобразования координат напряжения соединен с первыми входами второго и третьего вычитателей, выходы которых подключены к первым входам первого и второго блоков деления соответственно, выходы первого и второго блоков деления подключены соответственно через первый и второй преобразователи, реализующие функцию арктангенса, к входам четвертого вычитателя, выход которого образует выход устройства для определения скольжения асинхронного двигателя, отличающееся тем, что, с целью повышения точности, в него введены блоки определения действительной и мнимой составляющих тока, блок преобразования координат тока с тремя входами, два блока умножения, дифференцирующий
11
блок, четвертый масштабный усилитель и пятый вычитатель, при этом входы блоков определения действительной и мнимой составляющих тока пофазно объ единены между собой и подключены к первым двум выходам блока датчиков фазных токов, третий выход которого подключен к соответствующему входу блока определения действительной сое тавляющей тока, первый вход блока преобразования координат тока объеди ней с первыми входами блоков умножения и подключен к второму коммутируе мому выводу управляемого ключа, второй и третий входы блока преобразова ния координат тока подключены соответственно к выходам блоков определе ния действительной и мнимой составля Ю(цих тока, а выход блока преобразова
J/n
10
2558312
ния координат тока соединен с объединенными входами первых трех масштабных усилителей и входом дифференцирующего блока, подключенного выходом к входу четвертого масштабного усилителя, вторые входы первого и второго блоков умножения подключены соответственно к выходу второго и третьего масштабных усилителей, выходы первого и второго блоков умножения подключены соответственно к вторым входам второго и третьего вычитателей, выход первого вычитателя подключен к первому входу пятого вычитателя, соединенного вторым входом с выходом четвертого масштабного усилителя, а выход пятого вычитателя соединен с вторыми входами блоков деления.
15
If


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения скольжения асинхронного двигателя | 1989 |
|
SU1720137A1 |
| Устройство для определения скольжения асинхронного двигателя | 1987 |
|
SU1429037A1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1605307A1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1372581A1 |
| Устройство для определения скольжения асинхронного двигателя | 1986 |
|
SU1415399A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1453574A1 |
| Частотно-регулируемый электропривод | 1991 |
|
SU1823125A1 |
| Устройство для измерения пульсаций момента асинхронных двигателей | 1988 |
|
SU1606882A1 |
| Частотно-управляемый электропривод | 1990 |
|
SU1778906A1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1677840A2 |

Изобретение относится к электротехнике, а именно к системам управления частотнорегулируемых электроприводов, и может быть использовано для определения скольжения асинхронного двигателя. Целью изобретения является повышение точности. В устройство для определения скольжения введены блоки 19, 20 определения действительной и мнимой составляющих тока, блок 21 преобразования координат тока, два блока 22, 23 умножения, дифференцирующий блок 24, дополнительный масштабный усилитель 25 и дополнительный вычитатель 26, что обеспечивает возможность более точного определения скольжения не только в стационарных режимах, но и в переходных при изменяющемся модуле тока статора, на основе анализа электромагнитных процессов в двигателе и без применения таходатчика. 3 ил.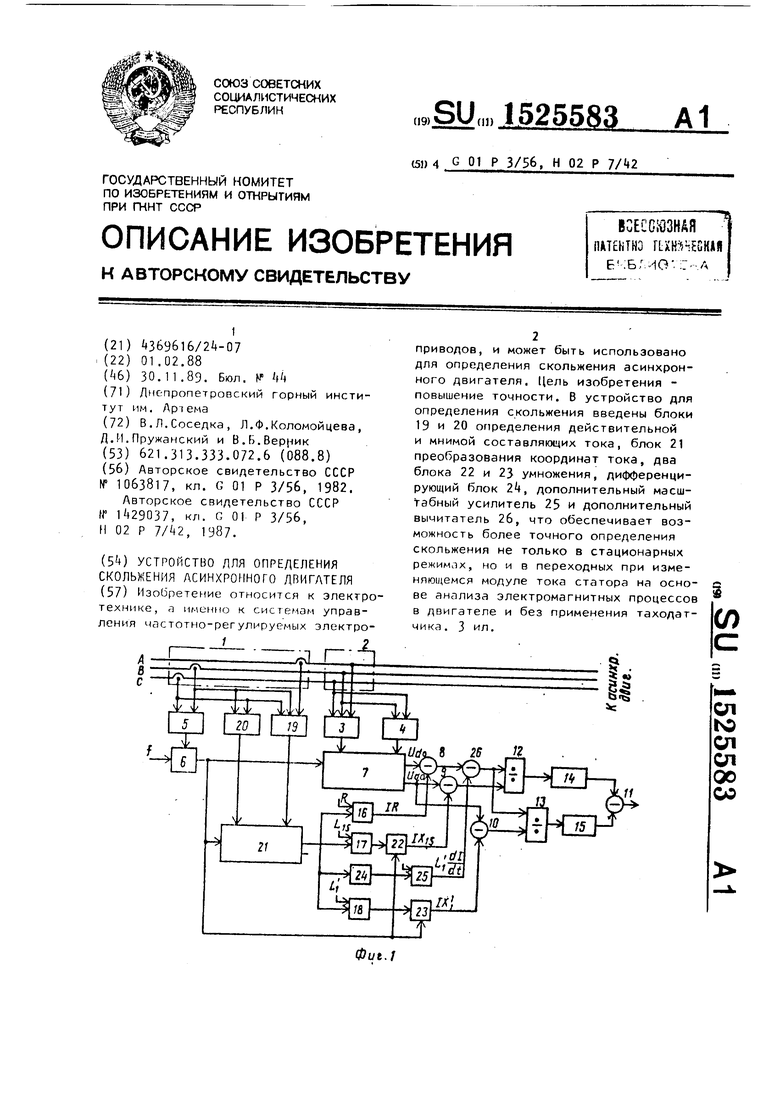
| Способ автоматического управления процессом упаривания мисцеллы и уваривания канифоли | 1982 |
|
SU1063817A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| (Б ) УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ | |||
