ляющей напряжения и в блок 13 опреде- 20 масштабном блоке 7 модуль толения мнимой составляющей напряжения, В блоке 12 по фазным напряжениям фаз А, В и С формируется сигнал U (проекция результирзпощего вектора напряжения на действительную ось), а в бл оке 13 по фазным напряжениям фаз В и С формируется сигнал и (проекция результирующего вектора напряжения на мнимую ось. Выходные сигналы датчиков тока фаз А, В и С подаются на детектор 6, а фаз В иС - на нуль-орган 5. В момент перехода линейного тока igp через, нуль на выходе нуль-органа 5 появляется сигнал, который на. время, равное периоду или кратное времени периода, открывает ключ 3 и импульсы от генератора 10 стабильной частоты начинают поступать на первый вход блока 11 преобразования координат.
Благодаря тому, что ключ 3 открывается, когда линейный ток фаз В и С проходит через нуль, осуществляется синхронизация работы устройства с положением вращающегося вектора тока. . Дпя повьппения точности синхредизации ° частота генератора 10 импульсов должна значительно (на два-четыре порядка) превосходить частоту сети. Так как блок преобразования координат относительно просто выполнить на функциях Уолща, то для их формирования частоту генератора 10 импульсов целесообразно принять 32- или 32 10 f или 32-10 f (f - частота питания двигателя).
Таким образом, на первый вход, блока 11 преобразования координат подается последовательность, импульсов
ка (выходной сигнал детектора 6).умножается на переходное индуктивное сопротивление статора X,, во втором масштабном блоке 8 модуль тока умно-
25 жается на индуктивное сопротивление рассеяния X,, а в третьем масштабном блоке 9 модуль тока умно.жается на активное сопротивление статора R. Первый масштабный блок 7 подает
30 сигнал, пропорциональный величине IX , на второй вход вычитателя 14, на первый вход которого подается сигнал и
Vo;
и на выходе первого вычи35
тателя 14 появляется сигнал U - IX, , Второй масштабный блок 8 подает
сигнал, пропорциональньй величине Ix,s на второй вход вычитателя 15, на первый вход которого подается сигнал U(yQ, и на, выходе второго вьгчита40 теля 15 появится сигнал Ис р. - 1х,.. Сигнал с первого вычитателя 14 подается на первый вход второго делителя 20, а сигнал с второго вычитателя 15 подается на первый вход первого
45 делителя 4, Третий масштабный блок 9 . подает сигнал, пропорциональный величине IR, на второй вход третьего вычитателя 16, на первый вход которого подается сигнал Uj , а на выходе
QQ третьего вычитателя 16 появится сигнал Ut -IR, который подается на вторые входы первого делителя 4 и второго делителя 20. Таким образом, в первом блоке 4 деления осуществля5g ется деление согласно первому члену выражения (1), а во втором блоке 20 деления осуществляется деление сог- ласно второму члену выражения (1), В блоках 18 и 19 осуществляется
20 масштабном блоке 7 модуль тока (выходной сигнал детектора 6).умножается на переходное индуктивное сопротивление статора X,, во втором масштабном блоке 8 модуль тока умно-
25 жается на индуктивное сопротивление рассеяния X,, а в третьем масштабном блоке 9 модуль тока умно.жается на активное сопротивление статора R. Первый масштабный блок 7 подает
30 сигнал, пропорциональный величине IX , на второй вход вычитателя 14, на первый вход которого подается сигнал и
Vo;
и на выходе первого вычи5
тателя 14 появляется сигнал U - IX, , Второй масштабный блок 8 подает
сигнал, пропорциональньй величине Ix,s на второй вход вычитателя 15, на первый вход которого подается сигнал U(yQ, и на, выходе второго вьгчита0 теля 15 появится сигнал Ис р. - 1х,.. Сигнал с первого вычитателя 14 подается на первый вход второго делителя 20, а сигнал с второго вычитателя 15 подается на первый вход первого
5 делителя 4, Третий масштабный блок 9 . подает сигнал, пропорциональный величине IR, на второй вход третьего вычитателя 16, на первый вход которого подается сигнал Uj , а на выходе
Q третьего вычитателя 16 появится сигнал Ut -IR, который подается на вторые входы первого делителя 4 и второго делителя 20. Таким образом, v в первом блоке 4 деления осуществляg ется деление согласно первому члену выражения (1), а во втором блоке 20 деления осуществляется деление сог- ласно второму члену выражения (1), В блоках 18 и 19 осуществляется
функциональное преобразование функ- JWH арктангенса.
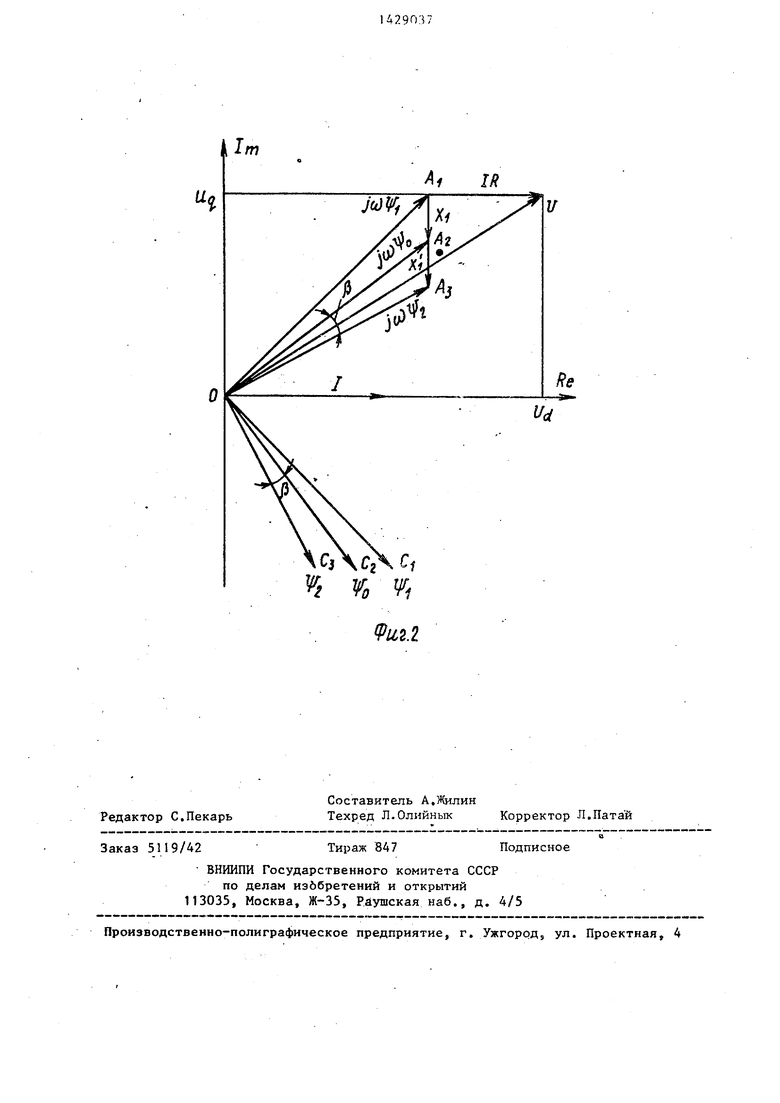
j Блок 18 розволяет определить фа- J30Bbiu сдвиг вектора СОЦ, а блок |19 фазовый сдвиг вектора JCOljJj от- |носительно вектора тока. Выходные сигналы функциональных преобразова- ;телей 18 и 19 подаются на входы чет- Iвертого вычитателя 17, который позволяет определить фазовый сдвиг вектора оац)д относительно вектора . На выходе четвертого вычитателя 17 появится сигнал, пропорциональный скольжению.
Таким образом, введение в устройство для определения скольжения асинхронного двигателя нуль-органа, детектора, дополнительных масштабных блоков, генератора импульсов, блока преобразования координат, блоков вьщеления составляющих напряжения статора, преобразователей функций арктангенса и дополнительного блока деления позволяет определить скольжение на основе анализа электромагнитных процессов в двигателе без применения токодатчика, что упрощает конструкцию, увеличивает точность и быстродействие устройства по сравнению с известным решением.
Формула изобретения
Устройство для определения скольжения асинхронного двигателя, содержащее датчики фазных токов и напряжений статора, управляемый ключ и первый блок деления, о т л и ч а ю - щ е е с я тем, что,.с целью повышения точности и увеличения быстродействия,- введены нуль-орган, детектор, первый, второй к третий масщтаб ные блоки, генератор импульсов,блок преобразования координат с тремя управляющими входами, блок выделения
действительной составляющей напряжения статора, блок выделения мнимой составляющей напряжения статора, первый - четвертый вычитатели, первый и второй функциональные преобразователи функции арктангенса и второй блок деления, при этом выходы датчика фазных токов статора подключены
к входам нуль-органа и детектора соответственно, выход которого подключен к входам указанных масштабных блоков, выход нуль-органа подключен к управляющему входу управляемого ключа, соединенного входом с выходом генератора импульсов, а выходом ,,- с первым управляющим входом блока преобразования координат, второй и третий управляющий входы которого соответственно через блок выделения действительной составляющей напряже-.. ния статора и блок вьщеления мнимой составляющей напряжения статора подключены к соответствующим выходам
датчика фазных напряжений, первый и второй выходы блока преобразования координат подключены к первьм входам первого и второго вычитателя соответственно, вторые входы которых
соединены соответственно с выходами, первого и второго масштабных блоков, второй выход блока преобразования координат и выход третьего масштабного блока подключены к входам третьего вычитателя, выходь первого и второго вычитателей подключены к входам первого блока деления, а выходы первого и третьего вычитателей подключены к входам второго блока деления, выходы первого и второго блоков деления соответственно через первый и второй функциональные преобразователи функций арктангенса подключены к входам четвертого вычитателя, выход
которого образует выхед устройства для определения скольжения асинхронного двигателя.
«2 f
Ц % Щ Ри.г.
AI IR
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения скольжения асинхронного двигателя | 1988 |
|
SU1525583A1 |
| Устройство для определения скольжения асинхронного двигателя | 1989 |
|
SU1720137A1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1605307A1 |
| Частотно-регулируемый электропривод | 1991 |
|
SU1823125A1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1372581A1 |
| Устройство для определения скольжения асинхронного двигателя | 1986 |
|
SU1415399A1 |
| Асинхронный электропривод | 1990 |
|
SU1767690A1 |
| Преобразователь перемещений | 1989 |
|
SU1670362A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Частотно-управляемый электропривод | 1990 |
|
SU1778906A1 |
Изобретение относится к электротехнике и может быть использовано в общепромышленных механизмах.Целью изобретения является повьппение точности и увеличение быстродействия, С этой целью устройство для определения скольжения асинхронного двигателя снабжено ключом 3, управляемым по сигналам нуль-органа 5 и генератора -импульсов 10, блоком 11 преобразования координат, детектором 6, выходом соединенным с входа.п-1 масштабных блоков 7-9, Входы детектора б к нуль-орг знй 5 подк.гЕочены к дат- чиклм токов ujv; Yпрзвля1оа;ий вход блока 11 соединен с выходом ключа 3, а два других упрявляюпдак входа fino- ка 11 через блоки 1., 13 выдепекия действительной и мнимой составляюя.,т5Х напряжения - с зыходаьш датчиков 2 напряжения статора асинхронного двигателя- Первый выход блока 1 подключен к первому входу вычитателя (в) а второй Еыуод - к первым входам В 15,;;5s Е- оры яходь укагяанных вычн- тателгй подклю чень; к выходам масштабных блокоз 7-9, Выход В 54 соединен с первыми входами блоко : 4. 20 деления; вторые входы которых подключены к выходам В 15,16, Выходь; блоков 4j 20 через функднокальные преобраэова- телк arctg 8,20 связаны с. вxoдa ш В 17. В результате в устройстве опре- дапекие скольжения производят на основе анализа электромагнитных процесS сов в двигателе без применения токо- датчика. 2 кл.
Редактор С.Пекарь
Составитель А.Жилин
Техред Л.Олнйнык Корректор Л.Пата й
Заказ 5119/42
Тираж 847
ВНИИПИ Государственного комитета СССР
по делам иэЬбретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Подписное
| Устройство для измерения скольженияАСиНХРОННОгО дВигАТЕля | 1979 |
|
SU817880A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кристаллизатор непрерывного действия | 1960 |
|
SU140043A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
