Изобретение относится к ткацкому машиностроению, конкретно к устройствам ротационных ремизоподъемных кареток для управления движением ремиз на бесчелночных и рапирных ткацких станках,
Цель изобретения - расширение технологических возможностей.
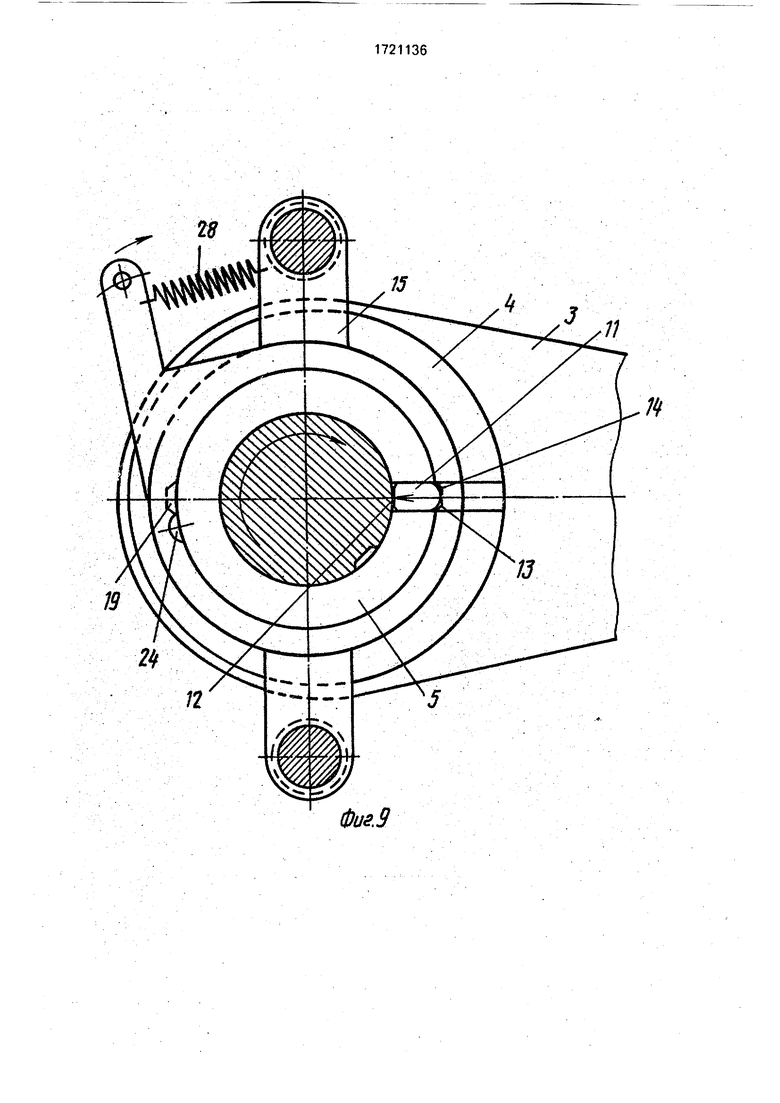
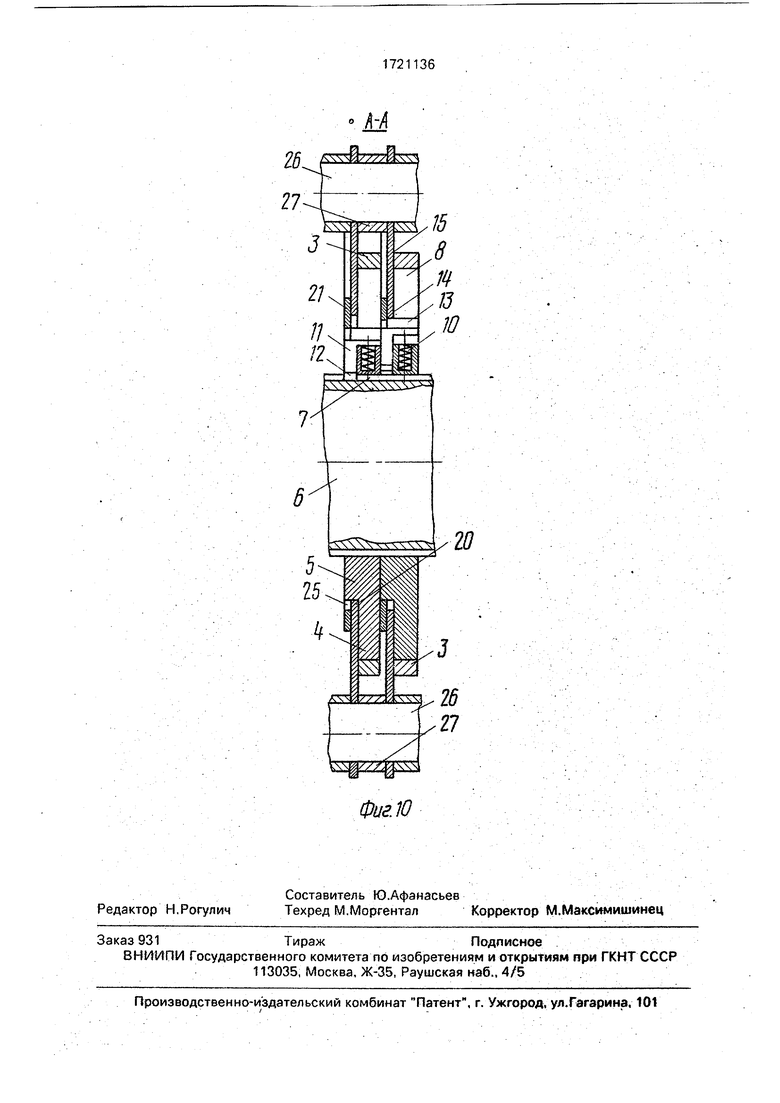
На фиг.1 изображена каретка при нижнем положении ремиз, общий вид; на фиг.2 - то же, при верхнем положении ремиз; на фиг 3 - устройство каретки, аксонометрия; на фиг.4 - то же, в исходном положении (нижний выстой ремизы); на фиг.5 - в момент сцепления шпонки с валом-ротором; на фиг.б - то же, в рабочем положении, в момент поднятия ремизы; на фиг.7 - то же, в рабочем положении, в момент верхнего положения ремизы; на фиг.8 - то же, в момент фиксации шпонки в верхнем положении (верхний выстой ремизы); на фиг.9 - устройство каретки, зафиксированное в верхнем положении; на фиг.10 - сечение А-А на фиг.4.
Предлагаемое устройство ротационной ремизоподъемной каретки (фиг.1) содержит рему: у 1, кинематически связанную через рычажной механизм 2 с шатуном 3, который расположен на диске эксцентрика 4 (фиг.З), выполненного заодно с кольцом 5 и расположенного с одной стороны, при этом кольцо 5 установлено на валу-роторе 6, имеющего два продольных диаметрально расположенных паза 7.
Эксцентрик 4 и кольцо 5 имеют радиальный открытый паз 8, в котором выполнено глухое отверстие 9 под пружину 10.
Шпонка 11 выполнена L-образной и установлена в радиальном пазу 8. С одной стороны шпонка 11 имеет клин 12 для взаимодействия с продольными пазами 7 вала- ротора 6, а с другой - клин 13 и участок 14 цилиндрической поверхности.
На кольце 5 установлена пластина 15, выполненная, например, в виде кольца 6 с ушами. 16, которые имеют отверстия 17 для крепления. На внутренней цилиндрической поверхности 18 пластины 15 диаметрально друг другу выполнены клинообразные пазы 19 и 20 для взаимодействия с клином 13 шпонки 11, ось симметрии которых перпендикулярна оси симметрии отверстий 17.
Шпонка 11 связана с программным механизмом (не показан) посредством органа 21 управления, выполненного в виде диска с тягой 22. На внутренней поверхности 23 органа 21 управления, выполнены цилиндрические пазы 24 и 25 для взаимодействия с участком 14 цилиндрической поверхности шпонки 11. В исходном положении цилиндрический паз 24 совмещен с клинообразным пазом 19 пластины 15, а цилиндрический паз 25 смещен относительно оси симметрии клинообразных пазов 19 и 20 пластины 15, на величину ширины шпонки
11. Орган 21 управления установлен на кольце 5 с возможностью свободного вращения.
Приводные блоки каретки в сборе крепятся ушами 16, в отверстия 17 которых
0 устанавливаются оси 26 жестко соединенные с корпусом каретки (не тказан). Для обеспечения строгой цепочки линейных размеров приводных блоков, между пластинами 15 на осях 26 устанавливаются при5 ставные кольца 27. Пружина 28 возврата крепится на пластине 15 и тяге 22 органа 21 управления.
Устройство работает следующим образом.
0Вал-ротор 6 получает вращение от привода (не показан), который периодически изменяет его скорость вращения, имея два
полных останова за оборот при 0 и 180°. За несколько градусов до полного останова ва5 ла-ротора 6, с программного механизма на орган 2.1 управления подаются команды Сцепление или Расцепление (этим командам соответствует наличие или отсутствие отверстий в перфоленте программного
0 механизм).
В исходном положении (фиг.1) ремиза 1 находится внизу. В этом положении клино- образный паз 19, пластины 15 (фиг.4) и цилиндрический паз 24, орган 21 управления
5 совмещены, при этом противоположные пазы 20 и 25 не совмещены, перекрываясь внутренними поверхностями 18 и 23, соответственно пластины 15 и органа 21 управления. Шпонка 11 своим клином 13 и
0 участком цилиндрической поверхности 14 находится в зацеплении с совмещенными пазами 19 и 24 и под действием усилия пружины 10 надежно фиксирует ремизу 1 в исходном положении, а также препятствует
5 сцеплению клина 12 шпонки 11 с продольными пазами 7 вала-ротора 6.
В соответствии с цикловой диаграммой работы ткацкого станка, при наличии в перфоленте программного механизма - отвер0 стия, на орган 21 управления подается команда Сцепление. Орган 21 управления поворачивается, преодолевая сопротивление пружины 28 возврата и своим цилиндрическим пазом 24 давит на участок
5 цилиндрической поверхности 14 шпонки 11. Это происходит в тот момент, когда продольный паз 7, вала-ротора 6 начинает совмещаться с радиальным пазом 8 кольца 5 и, преодолевая сопротивление пружины 10, плавно заводит клин 12 шпонки 11 в продольный паз 7 вала-ротора б. Когда вал-ротор б сделает полный останов, клин 12 шпонки 11 полностью войдет в зацепление с продольным пазом 7 вала-ротора 6 (фиг.5) и полностью выйдет из зацепления клином 13 и участком цилиндрической поверхности 14, соответственно из клинообразного паза 19 и цилиндрического паза 24, Орган 21 управления повернется и своей внутренней поверхностью 23, препятствует расцепле- нию клина 12 шпонки 11 с продольным пазом 7 вал-ротора 6 до тех пор, пока шпонка .11, увлекаемая вал-ротором 6, зайдет клином 13 под внутреннюю поверхность 18 окружности пластины 15 и начнет скользить по ней. Только после этого орган 21 управления под действием усилия пружины 28 возврата повернется в исходное положение, при котором его цилиндрический паз
24совместится с клинообразным пазом 19 пластины 15 для фиксации шпонки 11 (фиг.6).
Внутреннюю поверхность 18 окружности пластины 15 препятствует расцеплению клина 12 шпонки 11 с пазом 7 вал-ротора 6. Вал-ротор б, передавая свое движение шпонке 1, вращает кольцо 5 с эксцентриком 4 и шатуном 3. В свою очередь, шатун 3 передает движение через рычажный механизм 2 ремизе 1 (фиг. 1), поднимает ее.
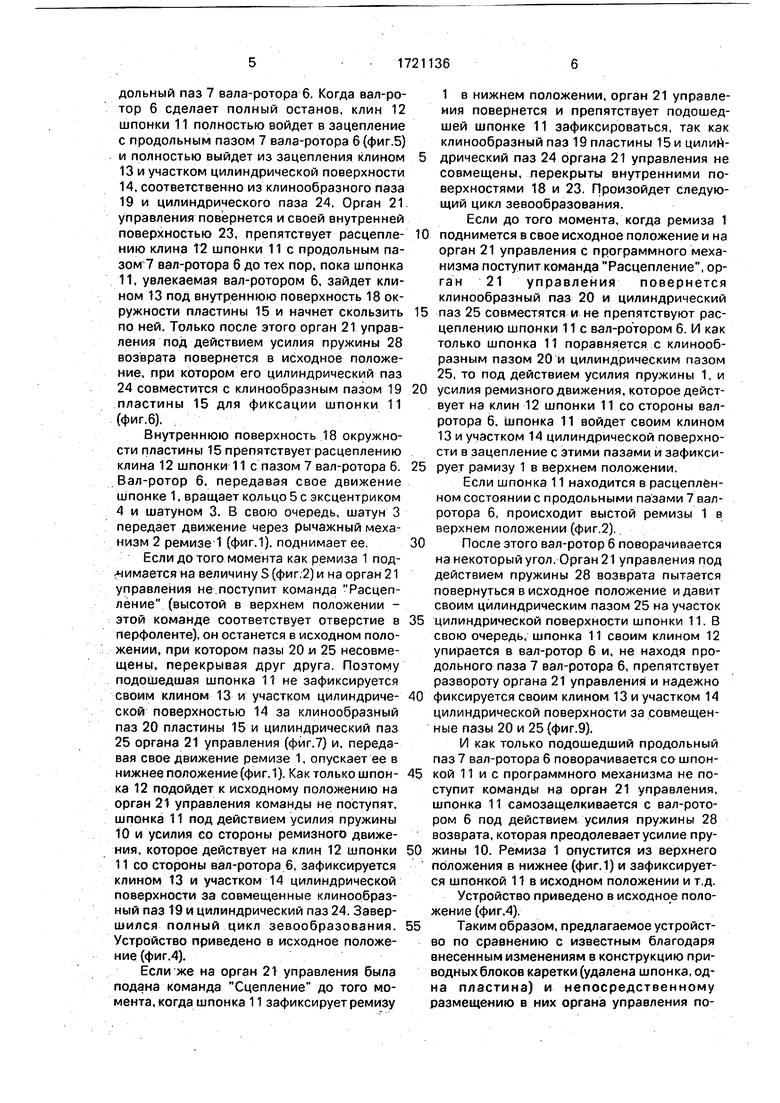
Если до того момента как ремиза 1 под- лшмается на величину 5(фиг.2) и на орган 21 управления не.поступит команда Расцепление (высотой в верхнем положении - этой команде соответствует отверстие в перфоленте), он останется в исходном положении, при котором пазы 20 и 25 несовмещены, перекрывая друг друга. Поэтому подошедшая шпонка 11 не зафиксируется своим клином 13 и участком цилиндриче- ской поверхностью 14 за клинообразный паз 20 пластины 15 и цилиндрический паз
25органа 21 управления (фйг.7) и, передавая свое движение ремизе 1, опускает ее в нижнее положение (фиг. 1). Как только шпон- ка 12 подойдет к исходному положению на орган 21 управления команды не поступят, шпонка 11 под действием усилия пружины
10и усилия со стороны ремизного движения, которое действует на клин 12 шпонки
11со стороны вал-ротора 6, зафиксируется клином 13 и участком 14 цилиндрической поверхности за совмещенные клинообразный паз 19 и цилиндрический паз 24. Завершился полный цикл зевообразования. Устройство приведено в исходное положение (фиг.4).
Если же на орган 21 управления была подана команда Сцепление до того момента, когда шпонка 11 зафиксирует ремизу
1 в нижнем положении, орган 21 управления повернется и препятствует подошедшей шпонке 11 зафиксироваться, так как клинообразный паз 19 пластины 15 и цилиндрический паз 24 органа 21 управления не совмещены, перекрыты внутренними поверхностями 18 и 23. Произойдет следующий цикл зевообразования.
Если до того момента, когда ремиза 1 поднимется в свое исходное положение и на орган 21 управления с программного механизма поступит команда Расцепление, ор- ган 21 управления повернется клинообразный паз 20 и цилиндрический паз 25 совместятся и не препятствуют расцеплению шпонки 11 с вал-ротором 6. И как только шпонка 11 поравняется с клинообразным пазом 20 и цилиндрическим пазом 25, то под действием усилия пружины 1, и усилия ремизного движения, которое действует на клин 12 шпонки 11 со стороны вал- ротора 6, шпонка 11 войдет своим клином 13 и участком 14 цилиндрической поверхности в зацепление с этими пазами и зафиксирует рамизу 1 в верхнем положении.
Если шпонка 11 находится в расцепленном состоянии с продольными пазами 7 вал- ротора 6, происходит выстой ремизы 1 в верхнем положении (фиг.2)..
После этого вал-ротор б поворачивается на некоторый угол. Орган 21 управления под действием пружины 28 возврата пытается повернуться в исходное положение и давит своим цилиндрическим пазом 25 на участок цилиндрической поверхности шпонки 11. В свою очередь, шпонка 11 своим клином 12 упирается в вал-ротор 6 и, не находя продольного паза 7 вал-ротора б, препятствует развороту органа 21 управления и надежно фиксируется своим клином 13 и участком 14 цилиндрической поверхности за совмещенные пазы 20 и 25 (фиг.9).
И как только подошедший продольный паз 7 вал-ротора б поворачивается со шпонкой 11 и с программного механизма не поступит команды на орган 21 управления, шпонка 11 самозащелкивается с вал-ротором 6 под действием усилия пружины 28. возврата, которая преодолевает усилие пружины 10. Ремиза 1 опустится из верхнего положения в нижнее (фиг.1) и зафиксируется шпонкой 11 в исходном положении и т.д. Устройство приведено в исходное положение (фиг.4).
Таким образом, предлагаемое устройство по сравнению с известным благодаря внесенным изменениям в конструкцию приводных блоков каретки (удалена шпонка, одна пластина) и непосредственному размещению в них органа управления позволяет расширить технологические возможности каретки обеспечить ее работу от общепринятых стандартных программ, конструкция устройства проще и, следовательно, технологична в изготовлении.
Ф о р м у л а и з о б р е т е н и я
1. Ротационная ремизоподъемная каретка к ткацкому станку, содержащая связанный с приводом вал-ротор, имеющий два продольных диаметрально расположенных паза, приводные блоки по числу ремиз, каждый из которых имеет свободно установленное на валу-роторе кольцо, в радиальном пазу которого установлена подпружиненная шпонка, кинематически связанная по- средством органа управления с программирующим устройством, эксцентрик, жестко связанный с кольцом и кинематически связанный с ремизкой, и жестко соединенную с корпусом каретки пластину, посредством кольцевой проточки свободно установленную на кольце взаимодействующую со шпонкой, один конец которой имеет цилиндрическую поверхность, а другой
клин для взаимодействия с продольными пазами вала-ротора, отличаю щ а я с я тем, что, с целью расширения технологических возможностей, пластина на кольцевой
проточке имеет два диаметрально расположенных клинообразных паза, а орган управления выполнен в виде диска с тягой, соосно установленного на кольце с возможностью свободного вращения и имеющего на внутренней поверхности два цилиндрических паза, причем пазы на диске размещены таким образом, что при совмещении одного клинообразного паза с цилиндрическим пазом второй цилиндрический паз диска смещен относительно второго клинообразного паза на ширину шпонки, а шпонка дополнительно имеет клин для взаимодействия с клинообразными пазами пластины и установлена с возможностью взаимодействия
цилиндрической поверхностью с цилиндрическими пазами диска.
2. Каретка по п. 1,отличающаяся тем, что шпонка выполнена L-образной, а кольцо расположено по одну сторону от эксцентрика.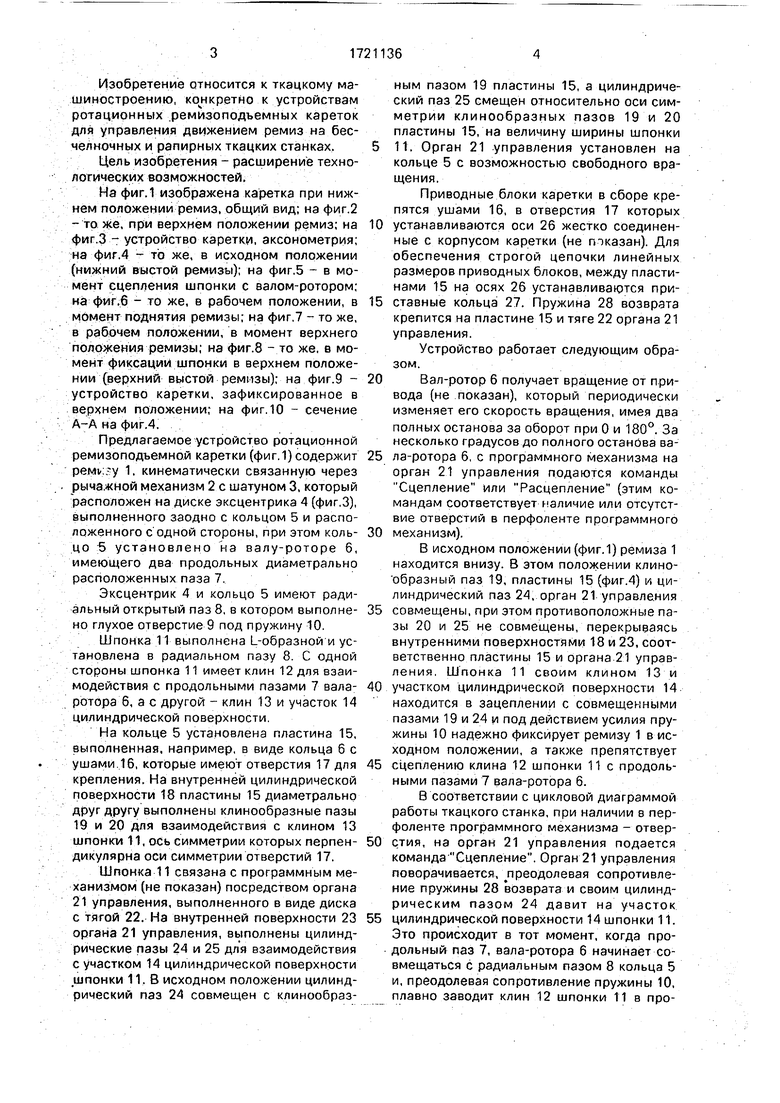

| название | год | авторы | номер документа |
|---|---|---|---|
| Ротационная ремизоподъемная каретка к ткацкому станку | 1988 |
|
SU1548289A1 |
| Ротационная ремизоподъемная каретка к ткацкому станку | 1987 |
|
SU1447950A1 |
| Ротационная ремизоподъемная каретка ткацкого станка | 1979 |
|
SU978736A3 |
| Ремизоподъемная каретка для ткацкого станка | 1975 |
|
SU973678A1 |
| Ремизоподъемная каретка для ткацкого станка | 1978 |
|
SU739143A1 |
| Ротационная ремизоподъемная каретка для ткацкого станка | 1979 |
|
SU1109055A3 |
| Ротационная ремизоподъемная каретка ткацкого станка | 1981 |
|
SU1114345A3 |
| Ротационная ремизоподъемная каретка для ткацкого станка | 1979 |
|
SU1009280A3 |
| Ремизоподъемная каретка к ткацкому станку | 1976 |
|
SU735680A1 |
| РЕМИЗОПОДЪЕМНАЯ КАРЕТКА К ТКАЦКОМУ СТАНКУ | 1995 |
|
RU2090675C1 |

Изобретение относится к ткацкому машиностроению. С целью расширения технологических возможностей в каретке, содержащей вал-ротор, приводные блоки по числу ремиз, каждый из которых имеет эксцентрик с кольцом, две подпружиненные .. 14 шпонки, две пластины, шатун, кинематически связанный с ремизой на внутренней поверхности 18 пластины 15. Имеются, два диаметрально расположенных клинообразных паза 19,20, Орган управления 21 выполнен в виде диска с тягой, установлен на. кольце 5 эксцентрика 4с возможностью свободного вращения и имеет на внутренней поверхности 23 два цилиндрических паза 24,25. Один паз 24 в исходном положении совмещен с клинообразным пазом 19 пластины 15, а второй смещен относительно клинообразного паза 2о на величину шпонки 11, которая выполнена L-образной и взаимодействует в процессе работы с пазами пластины 15, органа управления 21, продольными пазами 7, пазами вала-ротора 6. 1 з.п. ф-лы, 10 ил. 2S . Ј VI Ю 00 сх tfas.3
. И1:
Фиг.1
9С11Ш
W;ty
Z-глф
9ШШ
19
П
Фие.9
11
27
| Ротационная ремизоподъемная каретка к ткацкому станку | 1988 |
|
SU1548289A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
