Изобретение относится к станкостроению, может быть использовано для повышения точности перемещения или подвода суппорта станка, содержащего подающий винт, поворотную рукоятку и лимб.
Известен станок, в котором перемещение поперечного суппорта осуществляется подающим винтом с поворотной рукояткой и лимбом.
Известен станок, в котором перемещение поперечного суппорта осуществляется подающим винтом, снабженным механизмом, выполненным в виде червячного колеса и откидного червяка с дополнительным лимбом.
Известен станок, в котором перемещение поперечного суппорта осуществляется подающим винтом с установленным на нем червячным колесом, сцепляемым с откидным червяком, снабженным лимбом точной подачи.
Однако, использование червяка, и к тому же откидного, делает конструкцию механизма точной подачи суппорта сложной, увеличивает ее габариты, требует точного изготовления деталей механизма точной подачи. Вследствие большого числа рабочих стыков (ось поворота,зубчатое соединение, механизм фиксации червяка) снижается точность и стабильность подачи суппорта.
Цель изобретения - сократить габариты, упростить конструкцию механизма точной подачи, повысить точность перемещения исполнительного органа.
Цель изобретения достигается тем, что механизм точной подачи выполнен в виде установленного с возможностью осевого перемещения в опорном фланце параллельно оси подающего винта, пальца, на одном конце которого закреплен маховичок, а на другом - зубчатый венец, имеющий возможность периодического взаимодействия с зубчатым венцом, выполненным на внутренней поверхности лимба, закрепленного на фланце подающего винта.
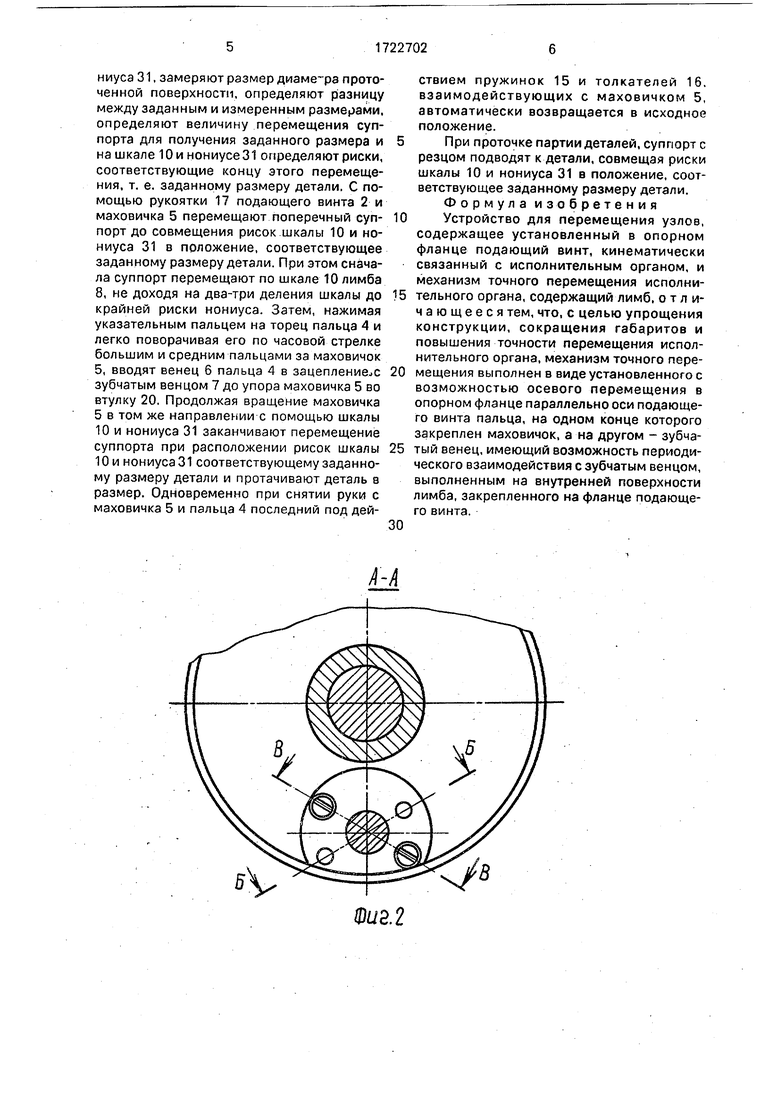
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 2.
Устройство содержит опорный фланец 1, подающий винт 2, исполнительный орган 3, палец 4, маховичок 5, зубчатый венец 6 на пальце, зубчатый венец 7 на лимбе, лимб 8 и фланец 9 на подающем винте 2.
Лимб 8 с круговой шкалой 10 имеет на внутренней поверхности зубатый венец 7 и прямоугольную канавку 11 для размещения головки 12 винта 13, выполненной со срезом так, чтобы при отвинчивании барашка 14
винт 13 не мог повернуться вокруг своей оси и выйти из канавки 11. Лимб 8 может при помощи винта 13 и барашка 14 неподвижно соединяться с фланцем 9, неподвижно сидящим на подающем винте 2.
Палец 4, имеющий на одном конце зубчатый венец 6 и на другом маховичок 5, под действием пружин 15 и толкателей 16 на фиг. 1, 3 и 4 показан выведенным из зацеп0 ления с зубчатым венцом 7 и не препятствует свободному вращению лимба 8 на фланце 9 при ослабленном барашке 14, а также вместе с фланцем 9 при перемещении суппорта рукояткой 17 подающего винта 2.
5 На гладком конце пальца 4 имеется отверстие 18 под конический штифт 19, выполняемое в сборе с маховичком 5 так, что после их соединения штифтом 19 и перемещение пальца 4 до упора маховичка 5 во
0 втулку 20, венец 6 пальца 40 находясь в зацеплении с зубчатым венцом 7, не выходит за зубчатый венец 7.
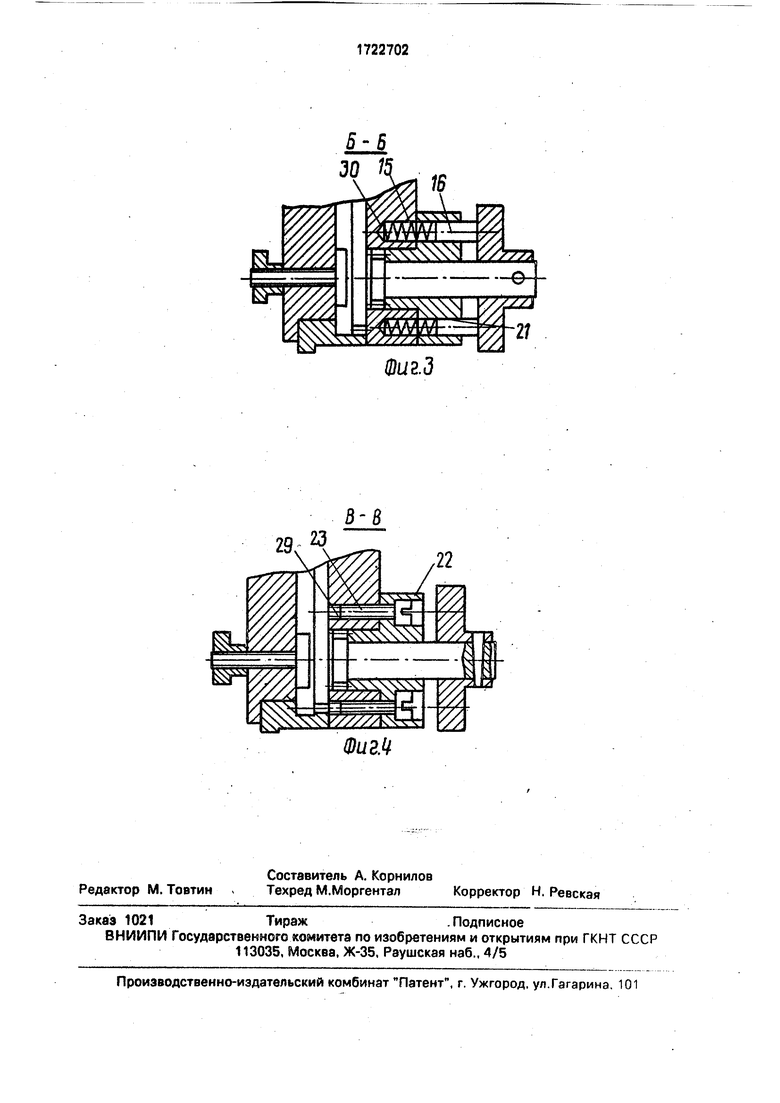
Втулка 20 имеет два отверстия 21 под толкатели 16 и два отверстия 22 под винты
5 крепления 23. Толкатели 16 свободно перемещаются в отверстиях 21 под действием пружинок 15. Пружинки 15 должны легко сжиматься указательным пальцем руки когда венец 6 пальца 4 вводится в зацепление
0 с зубчатым венцом 7 лимба 8 и выводить венец 6 из зацепления, возвращая в исходное положение при снятии указательного пальца.
Маховичок 5 на цилиндрической повер5 хности 24 имеет продольное рифление для удобства вращения и отверстие 25 под штифт 19 в ступице. Опорный фланец 1, закрепленный, например, на каретке 26 винтами 27 имеет отверстие 28 для посадки
0 втулки 20 и утопания венца 6 при выходе из зацепления с зубчатым венцом 7, имеет два резьбовых отверстия 29 для крепления втулки 20 винтами 23, два глухих отверстия 30 для пружинок 15. На цилиндрической на5 ружной поверхности фланца 1 нанесен нониус 31, служащий для более точного, чем на шкале 10 лимба 8 отсчета перемещений суппорта.
Устройство работает следующим обра0 зом.
Например, перемещая рукояткой суппорте резцом к вращающейся детали, касаются резцом ее поверхности. Коснувшись, совмещают одну из рисок шкалы 10с конеч5 ной риской нониуса 31. Затем лимб 8 с помощью винта 13 и барашка 14 закрепляют неподвижно на фланце 9 и делают пробную проточку детали.
С помощью средства измерения, точность которого не меньше чем точность нониуса 31, замеряют размер диаме рз проточенной поверхности, определяют разницу между заданным и измеренным размерами, определяют величину перемещения суппорта для получения заданного размера и на шкале 10 и нониусе31 определяют риски, соответствующие концу этого перемещения, т. е. заданному размеру детали. С помощью рукоятки 17 подающего винта 2 и маховичка 5 перемещают поперечный суп- порт до совмещения рисок шкалы 10 и нониуса 31 в положение, соответствующее заданному размеру детали. При этом сначала суппорт перемещают по шкале 10 лимба 8, не доходя на два-три деления шкалы до крайней риски нониуса. Затем, нажимая указательным пальцем на торец пальца 4 и легко поворачивая его по часовой стрелке большим и средним пальцами за маховичок 5, вводят венец 6 пальца 4 в зацепление с зубчатым венцом 7 до упора маховичка 5 во втулку 20. Продолжая вращение маховичка 5 в том же направлении с помощью шкалы 10 и нониуса 31 заканчивают перемещение суппорта при расположении рисок шкалы 10 и нониуса 31 соответствующему заданному размеру детали и протачивают деталь в размер. Одновременно при снятии руки с маховичка 5 и пальца 4 последний под дей
ствием пружинок 15 и толкателей 16. взаимодействующих с маховичком 5, автоматически возвращается в исходное положение.
При проточке партии деталей, суппорт с резцом подводят к детали, совмещая риски шкалы 10 и нониуса 31 в положение, соответствующее заданному размеру детали. Формула из-обретения Устройство для перемещения узлов, содержащее установленный в опорном фланце подающий винт, кинематически связанный с исполнительным органом, и механизм точного перемещения исполнительного органа, содержащий лимб, отличающееся тем, что, с целью упрощения конструкции, сокращения габаритов и повышения точности перемещения исполнительного органа, механизм точного перемещения выполнен в виде установленного с возможностью осевого перемещения в опорном фланце параллельно оси подающего винта пальца, на одном конце которого закреплен маховичок, а на другом - зубчатый венец, имеющий возможность периодического взаимодействия с зубчатым венцом, выполненным на внутренней поверхности лимба, закрепленного на фланце подающего винта.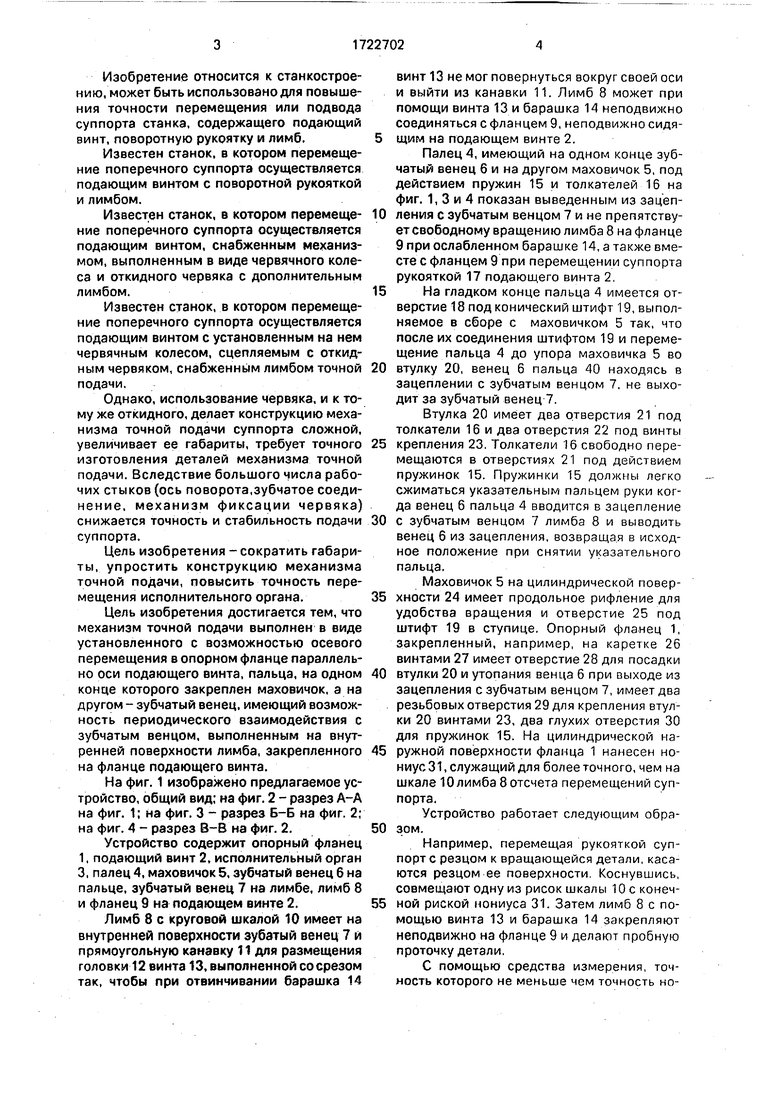
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ИСПОЛНИТЕЛЬНОГО ОРГАНА СТАНКА | 1990 |
|
RU2022757C1 |
| Устройство для точного перемещения рабочего органа станка | 1983 |
|
SU1199461A1 |
| Устройство для точного перемещения рабочего органа станка | 1990 |
|
SU1824256A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОКАРНЫМ СТАНКОМ | 1940 |
|
SU63198A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ТОКАРНЫЙ СТАНОК | 1996 |
|
RU2103114C1 |
| Механизированный привод самоцентрирующего кулачкового патрона | 1984 |
|
SU1166907A1 |
| Устройство для метания моделей | 1980 |
|
SU911593A1 |
| РАСТОЧНАЯ ГОЛОВКА | 1965 |
|
SU223566A1 |
| Борштанга к резьбонарезному станку | 1978 |
|
SU749586A1 |
| Дисковые ножницы | 1984 |
|
SU1186406A1 |
Изобретение относится к станкостроению и может быть использовано для повы- йения точности перемещения, например, суппорта станка, содержащего подающий винт, поворотную рукоятку и лимб. Устройство содержит опорный фланец 1, подающий винт 2, лимб 8 с круговой шкалой и внутренней зубчатой нарезкой 7. Параллельно винту 2 в опорном фланце размещен палец 4, с маховичком 5 на одном конце и с зубчатым венцом 6 на другом. Палец установлен в опорном фланце с возможностью вращения и осевого перемещения. В процессе работы винтом 2 исполнительный орган перемещается в заданное положение, а точная установка исполнительного органа осуществляется посредством введения венца 6 в зацепление с венцом 7 с последующим поворотом пальца 4. В процессе поворота пальца 4 зубчатый венец 6 вращает лимб 8, осуществляя тем самым точную подачу исполнительного органа. 4 ил.
Фиг. 2
ФигЛ
ФигЗ
| Малов А | |||
| Н | |||
| Механизация и автоматизация универсальных металлорежущих станков | |||
| М.: Машиностроение, 1969, с | |||
| Приспособление для получения кинематографических снимков или для проектирования их на экран при помощи фотографического аппарата или волшебного фонаря | 1914 |
|
SU501A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
