Изобретение относится к станкостроению ti может быть использовано в многоцелевых станках.
Известны устройства шагового реверсивного перемещения спутника, содержащие два i программируемых привода, гидропривод механизма захвата и электропривод механизма перемещения.
Недостатком этих конструкций является наличие программируемого привода механизма захвата, требующего установки на робототележке гидросистемы, что усложняет конструкцию и снижает надежность. Недостатком конструкции, имеющей два жестких ловителя, является необходимость точно изготавливать гнезда под ловители на спутниках, что увеличивает трудоемкость изготовления спутников.
Целью изобретения является повыше- %ние надежности и упрощение конструкции за счет сокращения количества программируемых приводов,
Поставленная цель достигается тем, что устройство для автоматической смены приспособлений-спутников, содержащее каретку с приводом возвратно-поступательного перемещения и ловители, расположенные с двух сторон относительно вертикальной плоскости симметрии приспособления-спутника и взаимодействующие с зацепами, выполненными на внутренних боковых .сторонах направляющих спутника, снабжено планками, размещенными в каретке с возможностью взаимодействия с выступами, выполненными на приводе, а ловители.шарнирно закреплены на каретке посредством тяг, одни концы которых установлены с возможностью продольного перемещения в сухарях, установленных дополнительно в упомянутых планках с возможностью по.ворота, при этом каретка выполнена с возможностью поворота в вертикальной плоскости относительно дополнительно введенной оси, установленной на приводе.
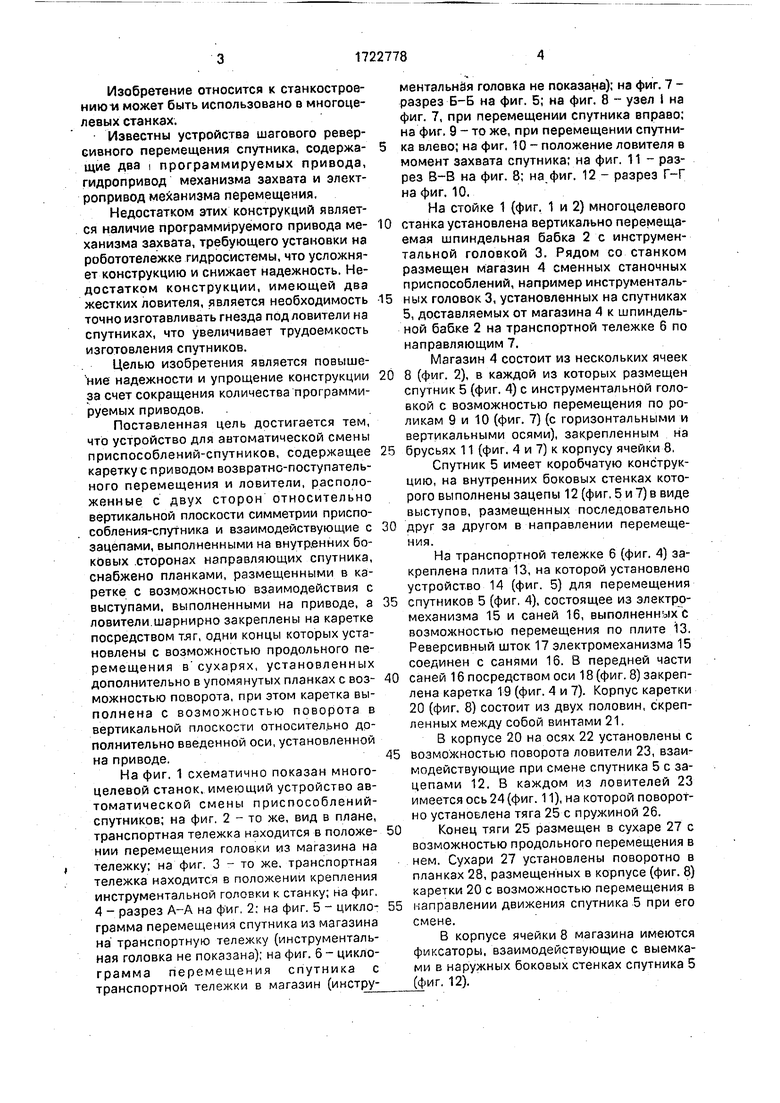
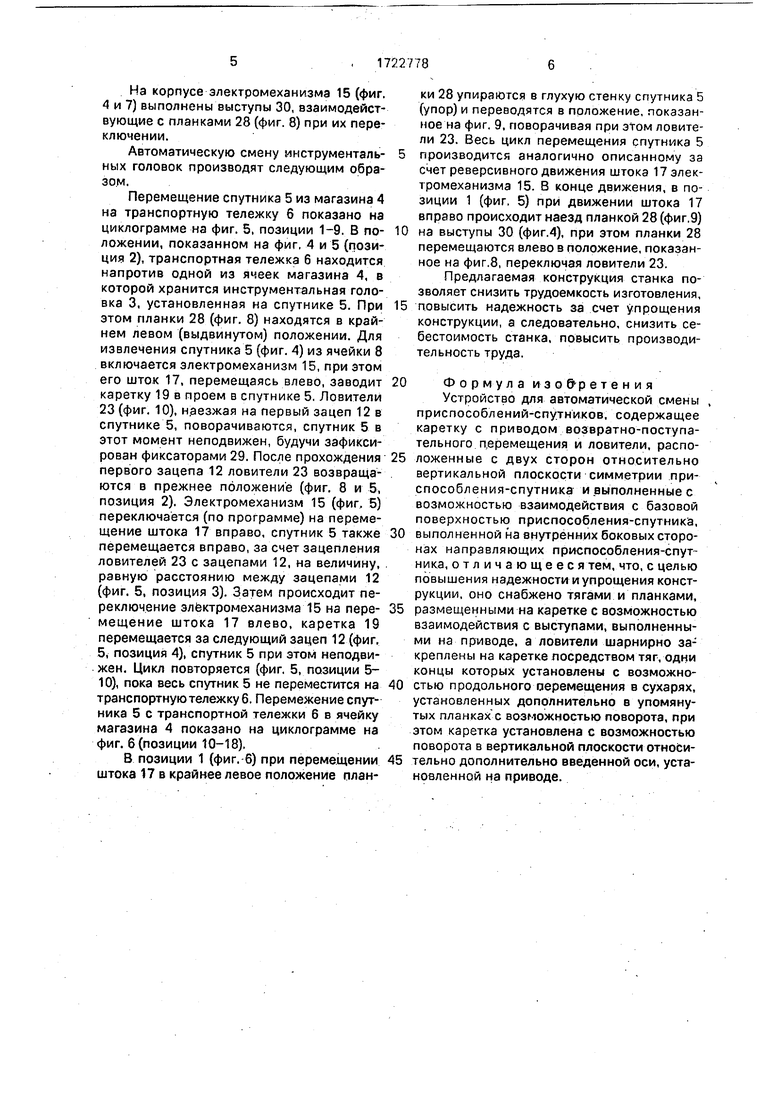
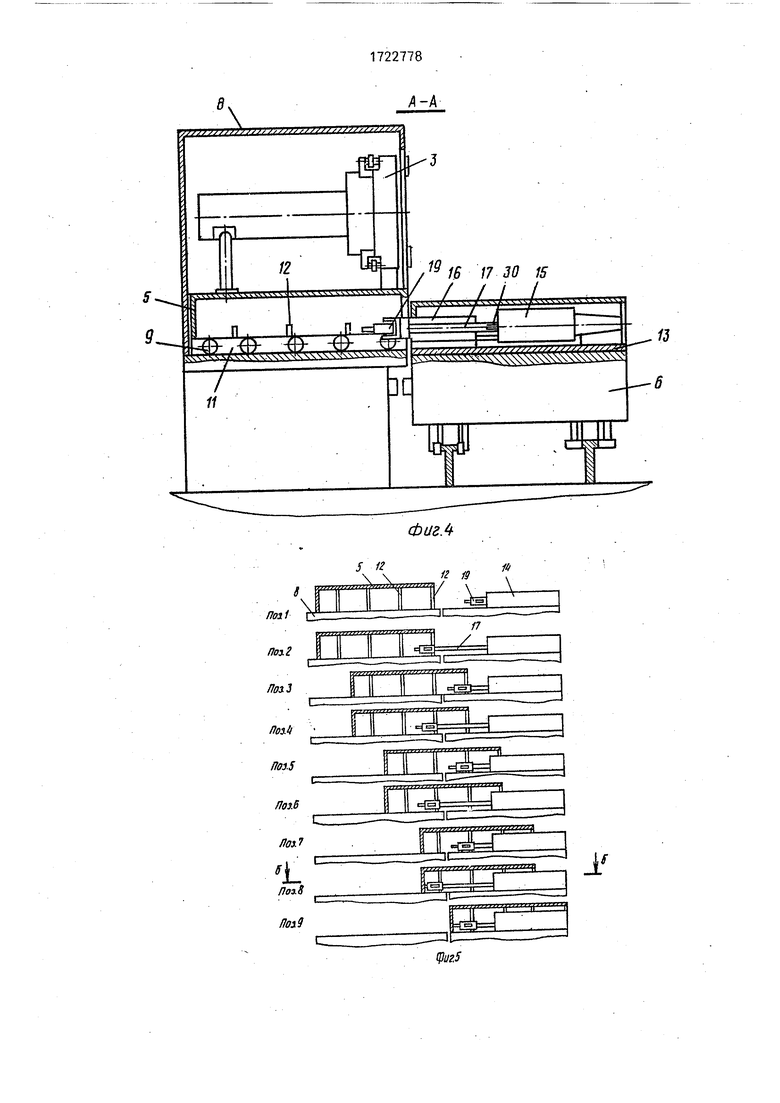
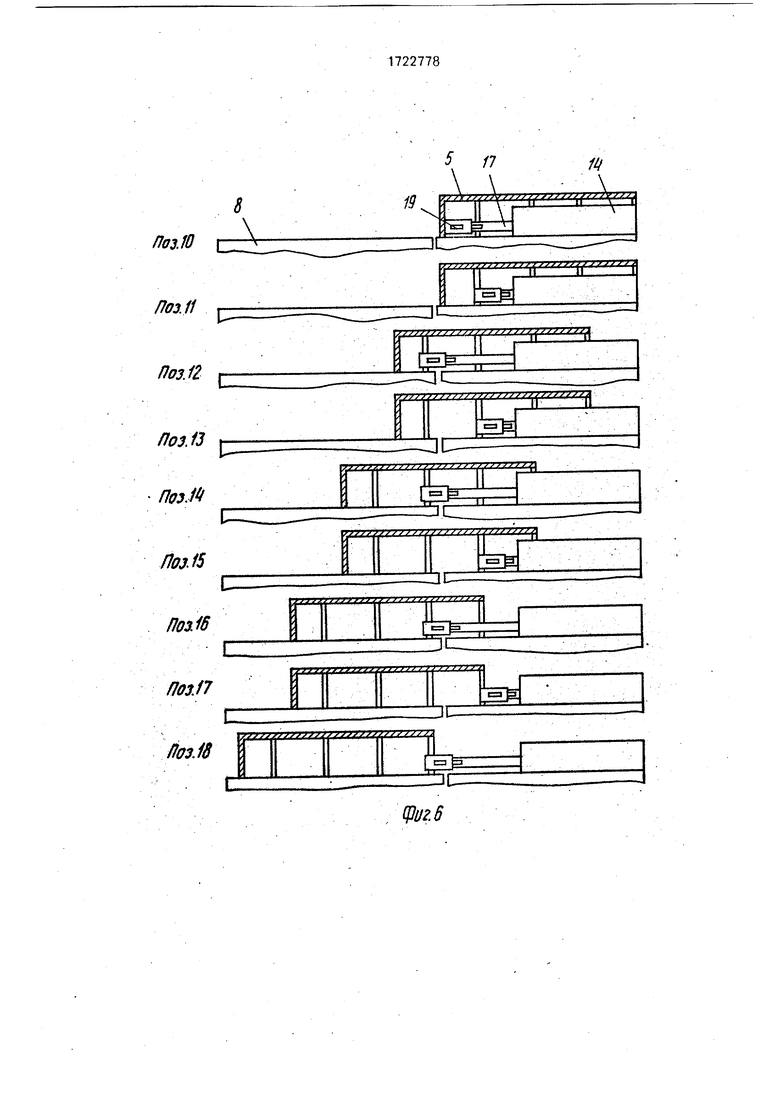
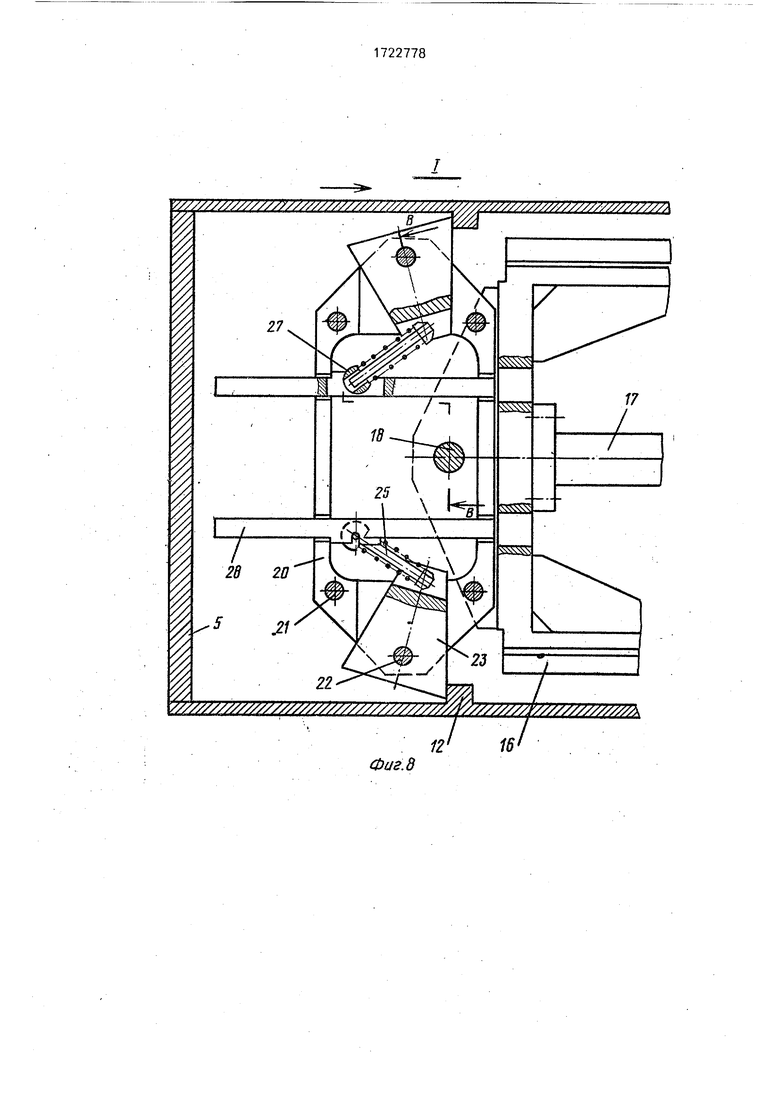
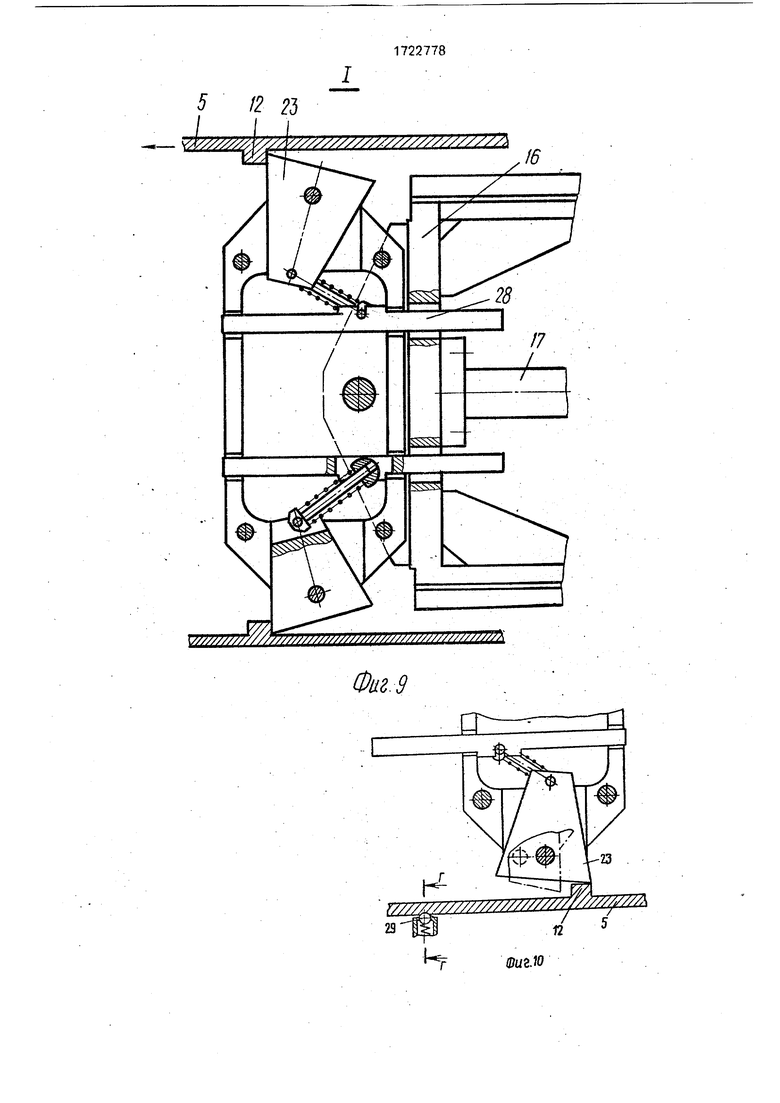
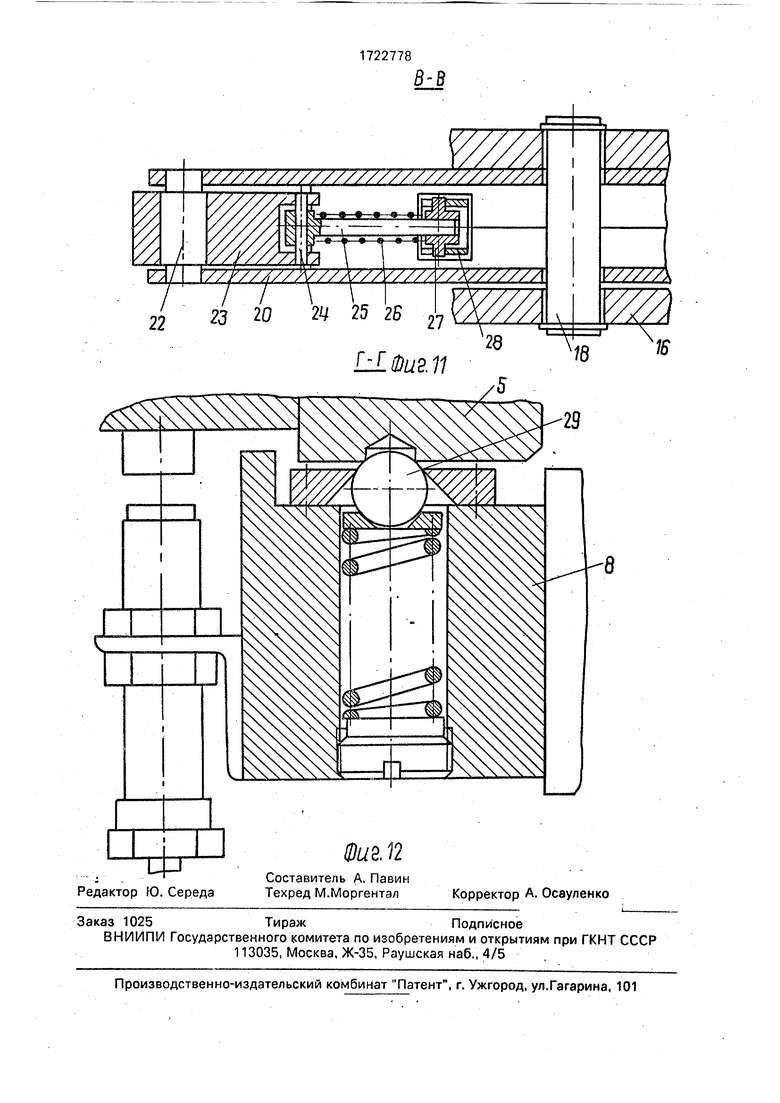
На фиг. 1 схематично показан многоцелевой станок, имеющий устройство автоматической смены приспособлений- спутников; на фиг. 2 - то же, вид в плане, транспортная тележка находится в положении перемещения головки из магазина на тележку; на фиг. 3 - то же. транспортная тележка находится в положении крепления инструментальной головки к станку; на фиг, 4 - разрез А-А на фиг. 2: на фиг. 5 - циклограмма перемещения спутника из магазина на транспортную тележку (инструментальная головка не показана); на фиг. 6 - циклограмма перемещения спутника с транспортной тележки в магазин (инструментальнйя головка не показана); на фиг. 7 - разрез Б-Б на фиг. 5; на фиг. 8 узел I на фиг. 7, при перемещении спутника вправо; на фиг. 9 - то же, при перемещении спутника влево; на фиг. 10 - положение ловителя в момент захвата спутника; на фиг. 11 - разрез В-В на фиг. 8; на фиг. 12 - разрез Г-Г на фиг. 10.
На стойке 1 (фиг, 1 и 2) многоцелевого
0 станка установлена вертикально перемещаемая шпиндельная бабка 2с инструментальной головкой 3. Рядом со станком размещен магазин 4 сменных станочных приспособлений, например инструменталь5 ных головок 3, установленных на спутниках 5, доставляемых от магазина 4 к шпиндельной бабке 2 на транспортной тележке 6 по направляющим 7.
Магазин 4 состоит из нескольких ячеек
0 8 (фиг. 2), в каждой из которых размещен спутник 5 (фиг. 4) с инструментальной головкой с возможностью перемещения по роликам 9 и 10 (фиг. 7) (с горизонтальными и вертикальными осями), закрепленным на
5 брусьях 11 (фиг. 4 и 7) к корпусу ячейки 8,
Спутник 5 имеет коробчатую конструкцию, на внутренних боковых стенках которого выполнены зацепы 12 (фиг. 5 и 7) в виде выступов, размещенных последовательно
0 друг за другом в направлении перемещения.. .
На транспортной тележке 6 (фиг. 4) закреплена плита 13, на которой установлено устройство-14 (фиг. 5) для перемещения
5 спутников 5 (фиг. 4), состоящее из электромеханизма 15 и саней 16, выполненных с возможностью перемещения по плите 13. Реверсивный шток 17 электромеханизма 15 соединен с санями 16. В передней части
0 саней 16 посредством оси 18 (фиг. 8) закреплена каретка 19 (фиг. 4 и 7). Корпус каретки 20 (фиг. 8) состоит из двух половин, скрепленных между собой винтами 21.
В корпусе 20 на осях 22 установлены с
5 возможностью поворота ловители 23, взаимодействующие при смене спутника 5 с зацепами 12. В каждом из ловителей 23 имеется ось 24 (фиг. 11), на которой поворотно установлена тяга 25 с пружиной 26.
0 Конец тяги 25 размещен в сухаре 27 с возможностью продольного перемещения в нем. Сухари 27 установлены поворотно в планках 28, размещенных в корпусе (фиг. 8) каретки 20 с возможностью перемещения в
5 направлении движения спутника 5 при его смене.
В корпусе ячейки 8 магазина имеются фиксаторы, взаимодействующие с выемками в наружных боковых стенках спутника 5 (фиг. 12).
На корпусе электромеханизма 15 (фиг. 4 и 7) выполнены выступы 30, взаимодействующие с планками 28 (фиг. 8) при их переключении.
Автоматическую смену ииструменталь- ных головок производят следующим образом.
Перемещение спутника 5 из магазина 4 на транспортную тележку б показано на циклограмме на фиг. 5, позиции 1-9. В по- ложении, показанном на фиг, А и 5 (позиция 2), транспортная тележка 6 находится напротив одной из ячеек магазина 4, в которой хранится инструментальная головка 3, установленная на спутнике 5. При этом планки 28 (фиг. 8) находятся в крайнем левом (выдвинутом) положении. Для извлечения спутника 5 (фиг. 4) из ячейки 8 включается электромеханизм 15, при этом его шток 17, перемещаясь влево, заводит каретку 19 в проем в спутнике 5. Ловители 23 (фиг. 10), наезжая на первый зацеп 12 в спутнике 5, поворачиваются, спутник 5 в этот момент неподвижен, будучи зафиксирован фиксаторами 29. После прохождения первого зацепа 12 ловители 23 возвращаются в прежнее положение (фиг. 8 и 5, позиция 2). Электромеханизм 15 (фиг. 5) переключается (по программе) на перемещение штока 17 вправо, спутник 5 также перемещается вправо, за счет зацепления ловителей 23 с зацепами 12, на величину, равную расстоянию между зацепами 12 (фиг. 5, позиция 3). Затем происходит переключение злёктромеханизма 15 на пере- мещение штока 17 влево, каретка 19 перемещается за следующий зацеп 12 (фиг, 5, позиция 4), спутник 5 при этом неподвижен. Цикл повторяется (фиг. 5, позиции 5- 10), пока весь спутник 5 не переместится на транспортную тележку 6. Перемежение спутника 5 с транспортной тележки 6 в ячейку магазина 4 показано на циклограмме на фиг. 6 (позиции 10-18),
В позиции 1 (фиг. б) при перемещении штока 17 в крайнее левое положение планки 28 упираются в глухую стенку спутника 5 (упор) и переводятся в положение, показанное на фиг, 9, поворачивая при этом ловители 23. Весь цикл перемещения спутника 5 производится аналогично описанному за счет реверсивного движения штока 17 электромеханизма 15. В конце движения, в позиции 1 (фиг, 5) при движении штока 17 вправо происходит наезд планкой 28 (фиг.9) на выступы 30 (фиг.4), при этом планки 28 перемещаются влево в положение, показанное на фиг.8, переключая ловители 23.
Предлагаемая конструкция станка позволяет снизить трудоемкость изготовления, повысить надежность за счет упрощения конструкции, а следовательно, снизить себестоимость станка, повысить производительность труда.
Формула изо&ретения Устройство для автоматической смены приспособлений-спутников, содержащее каретку с приводом возвратно-поступательного перемещения и ловители, расположенные с двух сторон относительно вертикальной плоскости симметрии приспособления-спутника и выполненные с возможностью взаимодействия с базовой поверхностью приспособления-спутника, выполненной на внутренних боковых сторонах направляющих приспособления-спутника, отличающеес я тем, что, с целью повышения надежности и упрощения конструкции, оно снабжено тягами и планками, размещенными на каретке с возможностью взаимодействия с выступами, выполненными на приводе, а ловители шарнирно закреплены на каретке посредством тяг, одни концы которых установлены с возможностью продольного перемещения в сухарях, установленных дополнительно в упомянутых планках с возможностью поворота, при этом каретка установлена с возможностью поворота в вертикальной плоскости относительно дополнительно введенной оси, установленной на приводе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкая производственная система | 1985 |
|
SU1321549A1 |
| Гибкий производственный модуль | 1987 |
|
SU1419852A1 |
| Многооперационный станок с ЧПУ | 1985 |
|
SU1305000A1 |
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |
| Металлорежущий станок с автоматической сменой инструментальных головок | 1987 |
|
SU1463427A1 |
| Устройство для перемещения изделий | 1987 |
|
SU1495055A1 |
| Многоцелевой станок с автоматической сменой инструмента | 1981 |
|
SU1009706A1 |
| МНОГОЦЕЛЕВОЙ СТАНОК | 1993 |
|
RU2108219C1 |
| Многоцелевой станок с автоматической сменой инструмента | 1991 |
|
SU1817747A3 |
| Гибкая производственная система | 1989 |
|
SU1672704A1 |
Изобретение относится к станкостроению и может быть использовано в тяжелых многоцелевых станках с числовым программным управлением и автоматической Сменой станочных приспособлений. Цель изобретения - повышение надежности и упрощение конструкции за счет сокращения количества приводов. Устройство для автоматической смены приспособлений-спутников содержит каретку 19. с приводом возвратно-поступательного перемещения 15 и расположенные с двух сторон относительно вертикальной плоскости симметрии приспособления-спутника ловители, которые взаимодействуют с зацепами 12, выполненными на внутренних боковых сторонах направляющих спутника. Устройство снабжено планками, размещенными в каретке 19с возможностью взаимодействия с выступами 30, выполненными на приводе 15, а ловители шарнирно закреплены на каретке 19 посредством тяг, одни концы которых установлены с возможностью продольного перемещения в поворотных сухарях, которые установлены в планках. Каретка 19 выполнена с возможностью поворота в вертикальной плоскости относительно дополнительной оси, установленной на приво де 15. 12 ил. сл с
«У/
Е&
,11-U.
Ъ1.ИШ
Э
8
А -А
Фаг Л
Роз. 11
Поз.12
По3.13
Поз.15
Поз.1б
Поз.П
5 П
Фиг. 8
12
16
/////////////////////// ////{//////////////////{////////{Л
Фиг. 9
Редактор Ю. Середа
Составитель А. Павин Техред М.Моргентал
Заказ 1025ТиражПодписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., 4/5
Корректор А. Осауленко
| Многоцелевой станок | 1984 |
|
SU1194646A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
