Изобретение относится к станкостроению. .
Целью изобретения является повышение надежности работы станка путем упрощения конструкцин механизма автоматической смены приспособлений-спутников .
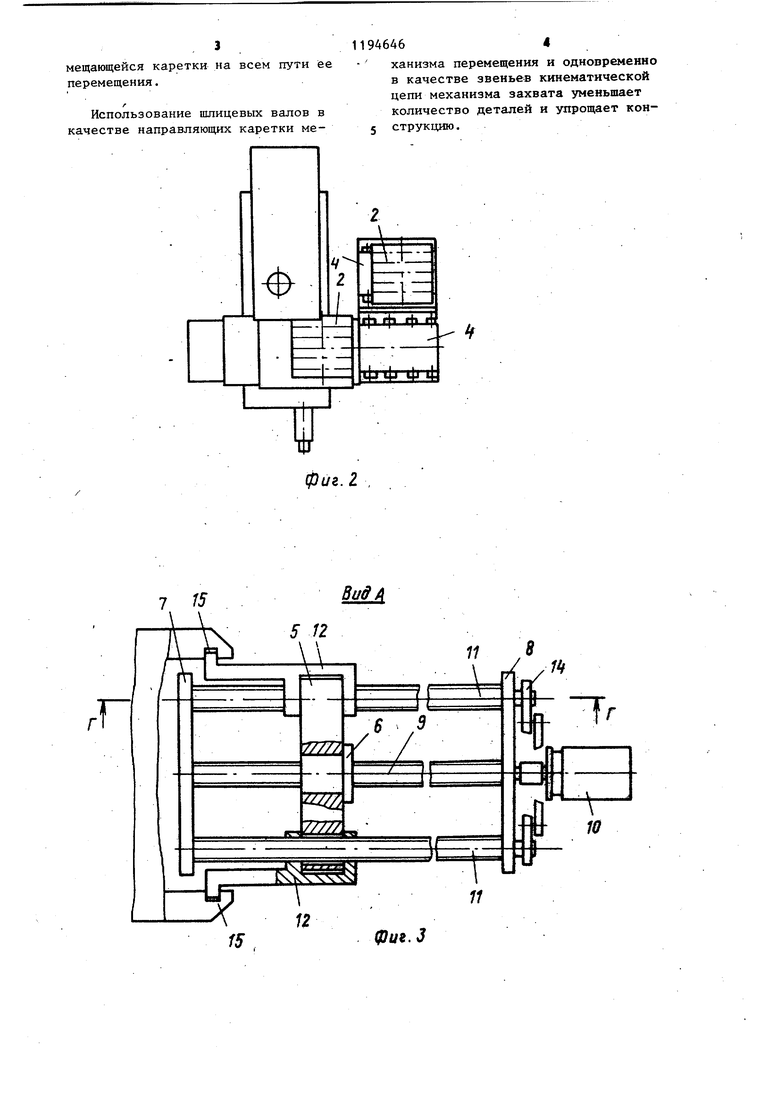
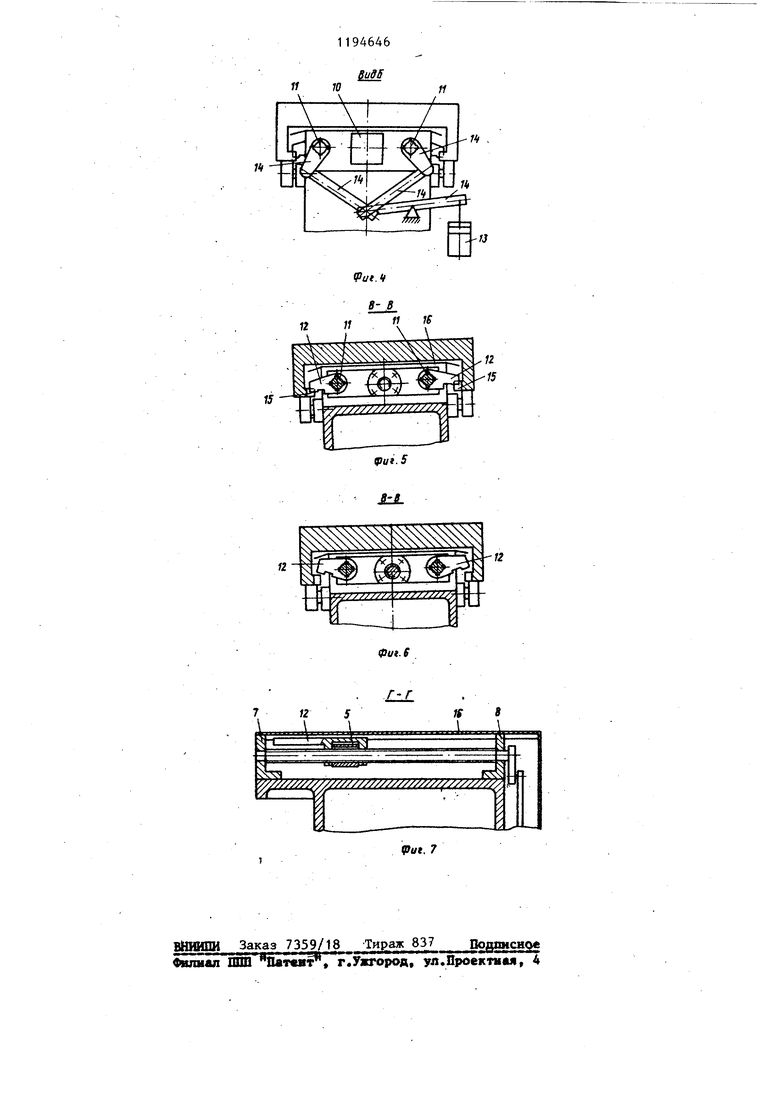
На фиг.1 показан многоцелевой станок, вид спереди; на фиг,2 то же, вид в плане; на фиг.З вид А на фиг.1, на фиг.4 - вид Б на фиг,1; на фиг.З - разрез В-В на фиг.1 (приспособление-спутник захвачено), на фиг.6 - то же (приспособление-спутник освобождено); на фиг.7 - разрез Г-Г на фиг.3.
МногЪцелевой станок содержит рабочий стол 1 с устройством для фиксации (не показано) приспособлений-спутников 2 и расположенное у станка основание 3, на котором размещены два устройства 4 для автоматической смены приспособлений-спуников. Устройство 4 включает в себя механизмы захвата и перемещения.
Механизм перемещения приспособления-спутника 2 содержит каретку 5, на которой жестко закреплена гайка На основании 3 закреплены кронштейны 7 и 8, в которых установлены винт 9 с приводом его вращения 10 и щлицевые валы 11. В каретке 5 вьтолнены два отверстия, сопряженны с наружными цилиндрическими поверхностями шлицевых валов 11.
Механизм захвата приспособленияспутника 2 состоит из ловителей 12, расположенных с двух сторон относительно вертикальной плоскости симметрии приспособления-спутника 2, и привода их поворота. Ловители 12 имеют шлицевые отверстия, сопряженн с шлицевыми валами 11 с возможностью поворота ловителей 12 относительно каретки 5. Привод поворота ловителей 12 выполнены в виде гидроцилиндра 13 и системы рычагов 14, конечные звенья которых закреплены .на шлицевых валах 11.
1
С внутренних боковых сторон направляющих приспособления-спутника 2 расположены гнезда 15 под ловители 12.
На кронштейнах 7 и 8 закреплена защитная крьшжа 16, расположенная над механизмами захвата и переме94646J
щения по всей длине механизма перемещения.
Многоцелевой станок работает следующим образом.
5 Закрепляют подлежащую обработке деталь (не показана) на приспособлении-спутнике 2, установленном на устройстве 4. При поступлении команды на загрузку станка рабочий стол 1 перемещается на позицию смены против загруженного приспособления-спутника 2. Приводной гидроцилиндр 13 через .систему рычагов 14 и шлицевые валы 11 поворачивает ловители 12, вводя их в гнезда 15 загруженного приспособленияспутника 2. Приводом 10 перемещают каретку 5 с приспособлением-спутником 2 в крайнее переднее положение
20 на рабочий стол 1 станка. После зтого гидроцилиндр 13 производит поворот ловителей 12, выводя их из . гнезд 15 приспособления-спутника 2. Затем приспособление -спутник 2
25 закрепляется устройством для фиксации на рабочем столе 1.Механизм перемещения отводит каретку 5 в крайнее Зещнее положение.
После окончания цикла загрузки
30 начинается цикл обработки детали, когда производят загрузку второго приспособления-спутника 2.
По окончании обработки детали подается команда на смену приспособления-спутника 2. При этом рабочий стол 1 возвращается на предьщущую позицию смены и начинается цикл разгрузки. Ловители 12 перемещаются в крайнее переднее положение, пово Q рачиваются и входят в гнезда 15
приспособления-спутника 2. Последний расфиксируется на рабочем столе 1 и механизм перемещения устанавливает его на устройство 4. После этого
рабочий стол 1 перемещается в позицию смены.против второго приспособления-спутника 2. Цикл загрузки станка приспособлением-спутником 2 аналогичен описанному вьш1е.
50 Предложенная конструкция позволяет обеспечить надежную работу станка при относительно упрощенной конструкции устройства смены изделий. Надежность работы обеспечивается
55 защитой механизмов от осыпающейся с приспособления-спутника стружки и ста1бильным положением приспособления-спутника относительно перемещающейся каретки на всем пути ее перемещения.
f
Использование шлицевых валов в качестве направляющих каретки ме11946464
ханизма перемещения и одновременно в качестве звеньев кинематической цепи механизма захвата уменьшает количество деталей и упрощает конструкцию.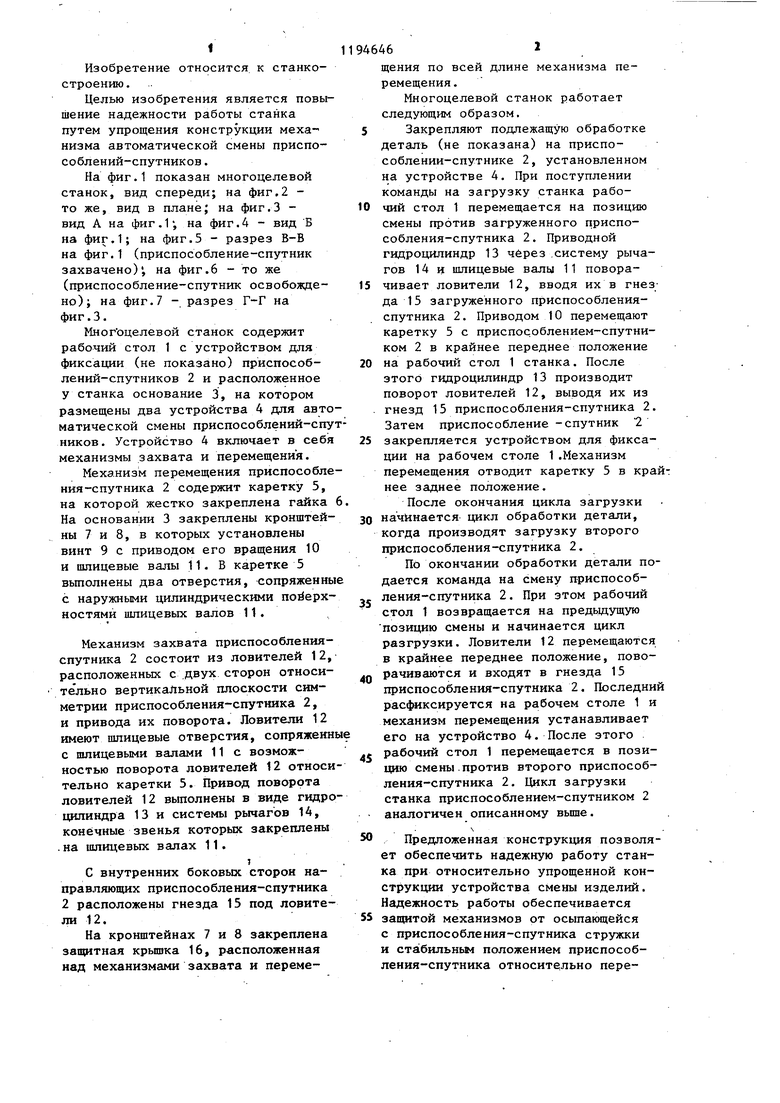
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоцелевой станок | 1986 |
|
SU1465239A2 |
| Многоцелевой станок с ЧПУ | 1983 |
|
SU1090538A1 |
| Устройство для автоматической смены приспособлений-спутников | 1989 |
|
SU1722778A1 |
| Многоцелевой станок | 1989 |
|
SU1660937A1 |
| Многопозиционный агрегатный станок | 1981 |
|
SU988529A1 |
| Металлорежущий станок с устройством для автоматической смены обрабатываемых деталей | 1977 |
|
SU742105A1 |
| Многоцелевой станок с ЧПУ | 1983 |
|
SU1166965A1 |
| Металлорежущий станок с устройством для автоматической смены обрабатываемых деталей | 1977 |
|
SU745649A1 |
| Гибкая производственная система | 1989 |
|
SU1672704A1 |
| МНОГОЦЕЛЕВОЙ СТАНОК С УСТРОЙСТВОМ АВТОМАТИЧЕСКОЙ СМЕНЫ ИНСТРУМЕНТА | 1994 |
|
RU2108218C1 |
1. МНОГОЦЕЛЕВОЙ СТАНОК, содержащий установленный на основании с возможностью перемещения стол с устройством фиксации приспособлений-спутников, устройство для автоматической смены приспособлений-спутников, включающее механизм перемещения с направляющими и механизм захвата приспособленийспутников с ловителями, о т л ичающийся тем, что, с целью повышения надежности в работе, устройство для автоматической смены приспособлений-спутников снабжено защитной крьшкой, размещенной над механизмами захвата и перемещения, при этом ловители расположены с двух сторон относительно вертикальной плоскости симметрии приспособления-спутника, а гнезда под ловители выполнены на внутренних боковых сторонах направляющих спутника.. 2. Станок по п.1, о т л ичающийся тем, что, с целью упрощения конструкции, направляющие механизма перемещения выполнены в виде пшицевых валов, соединенных с ловителями и кинематически связанных между собой. Од 4 Од
i
фиг. 2
В ид А
Ф
фиг. J
и
12
ш //м//м // / / //Щ
№ 8
L
| Прицепной каток для уплотнения грунта | 1951 |
|
SU95624A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
