Фиг.1
Изобретение относится к весоизмерительной технике, а именно к контролю массы движущихся по роликовому транспортеру изделий, и может быть использовано для контроля, разбраковки и сортировки по массе штучных изделий в различных отраслях промышленности.
Известно сгройство для транспортирования и взвешивания штучных грузов, использующее эффект гравитации, содержащее цепь последовательно установленных транспортирующих устройств, в которую параллельно введены два попеременно включаемых спиральных гравитационных спуска, причем спуски смонтированы на весах.
Наиболее близким по технической сущности к предлагаемому является устройство для взвешивания предметов, перемещаемых роликовым транспортером, содержащее роликовую грузоприемную платформу, расположенную между роликами транспортера на арретире с пневмоприводом, причем арретир выполнен в виде двух пар эксцентриков, установленных симметрично продольной оси роликовой грузоприемной платформы, шарнирно связанных посредством жестко посаженных на них коромысел с попеременными отсекателями предметов и пневмоприводом и контактирующих с вертикальными опорами, взаимодействующими с роликовой грузоприемной платформой.
Недостатками данного устройства являются сложность и материалоемкость конструкции, необходимость системы подвода сжатого воздуха для работы пневмоцилинд- ров, а также сложная система рычагов и кулачков с наличием дополнительной платформы.
Целью изобретения является увеличение быстродействия освобождения грузоприемной платформы от груза.
Поставленная цель достигается тем, что в грузоприемном устройстве для весов, встроенных в гравитационный роликовый конвейер, содержащем установленный на грузоприемной платформе рольганг, расположенный в плоскости роликового конвейера и арретирующий механизм, арретирующий механизм выполнен в виде электромагнита, связанного посредством подпружиненной тяги с ползуном, на котором закреплены упоры с обрезиненной скошенной поверхностью, причем арретирующий механизм установлен на грузоприемной платформе под роликами рольганга с возможностью контакта упоров скошенной обрезиненной поверхностью с роликами рольганга.
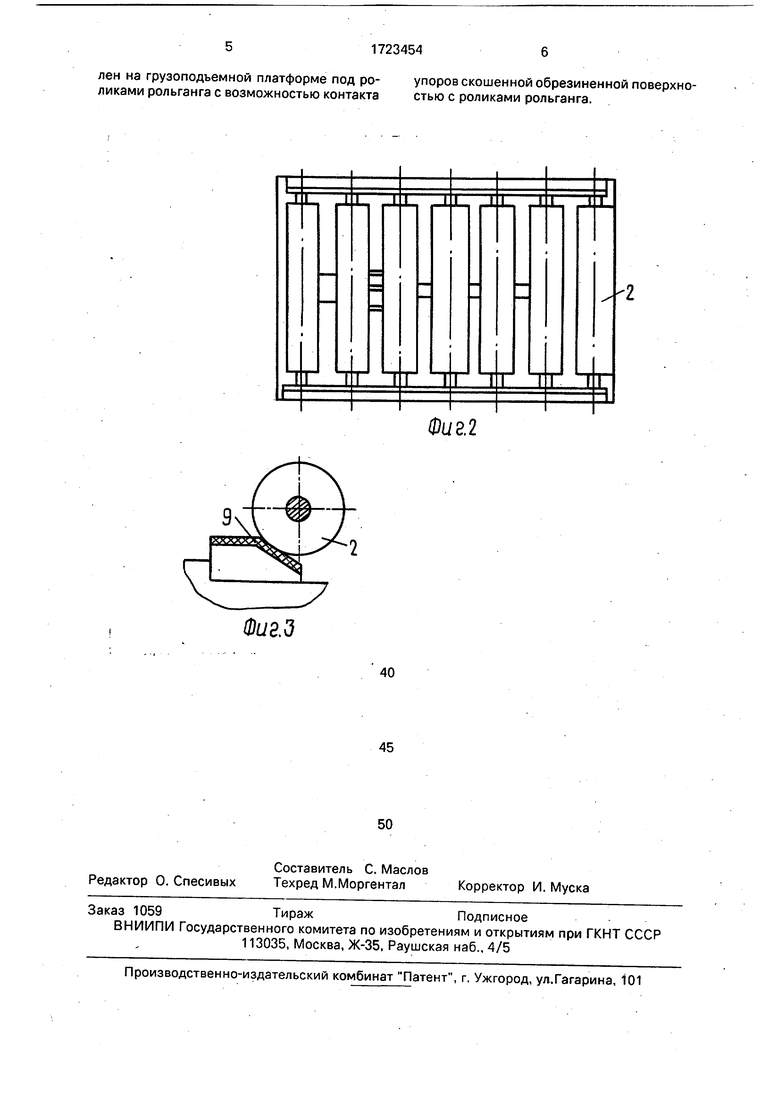
На фиг.1 изображена схема устройства, общий вид; на фиг.2 -тоже, вид сверху; на фиг.З - контакт фрикционного упора с роликом рольганга.
Устройство содержит грузоприемную
платформу 1, на которой закреплены ролики 2 рольганга 3, расположенного в плоскости роликового конвейера. По роликам 2 перемещается взвешиваемый груз 4. На грузоприемной платформе 1 закреплен электромагнит 5, связанный тягой 6 с ползуном 7. На ползуне 7 закреплены упоры 8 со скошенной поверхностью и резиновыми прокладками 9. На тяге 6 закреплена пружина 10.
Устройство работает следующим образом.
Взвешиваемый груз 4 поступает на
рольганг 3, В это время срабатывает электромагнит 5 и прижимает упоры 8 скошенными поверхностями через резиновые прокладки 9 к роликам 2. Груз 4 останавливается, происходит взвешивание. При выключении электромагнита 5 пружина 10 через тягу 6 возвращает ползун 7 с закрепленными на нем упорами 8 в исходное состояние, при этом часть роликов 2 проворачивается вследствие трения резиновой прокладки 9 и груз 4 под действием этого и скатывающей силы освобождает грузоприемную платформу 1.
Экономический эффект от использования предлагаемого устройства по сравнению с прототипом достигается за счет повышения быстродействия процесса освобождения грузоприемной платформы от груза, а следовательно, повышения производительности труда и за счет упрощения
конструкции, уменьшения материалоемкости, так как исключается система обеспечения сжатым воздухом пневмоцилиндров и сложная система рычагов и кулачков, это, в свою очередь, повышает культуру производства и уменьшает уровень шума от пневматики.
Формула изобретения Грузоприемное устройство для весов, встроенных в гравитационный роликовый
конвейер, содержащее установленный на грузоприемной платформе рольганг, расположенный в плоскости роликового конвейера, и арретирующий механизм, отличающееся1 тем, что, с целью увеличения быстродействия, арретирующий механизм выполнен в виде электромагнита, связанного посредством подпружиненной тяги с ползуном, на котором закреплены упоры с обрезиненной скошенной поверхностью, причем арретирующий механизм установ
лен на грузоподъемной платформе под ро- упоров скошенной обрезиненной поверхно- ликами рольганга с возможностью контакта стью с роликами рольганга.
| название | год | авторы | номер документа |
|---|---|---|---|
| Контрольно-весовое устройство для отбраковки штучных грузов | 1979 |
|
SU859826A1 |
| Устройство для взвешивания слитков | 1990 |
|
SU1760364A1 |
| Весоизмерительное устройство | 1979 |
|
SU859825A1 |
| АВТОМАТИЗИРОВАННАЯ ВЕСОИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 1992 |
|
RU2088895C1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1938 |
|
SU57816A1 |
| Устройство для взвешивания предметов,перемещаемых роликовым транспортером | 1975 |
|
SU516911A1 |
| Аппарат для автоматического взвешивания,дозирования и упаковки штучных пищевых продуктов | 1972 |
|
SU518637A1 |
| Весоизмерительное устройство | 1990 |
|
SU1755057A1 |
| Устройство для взвешивания заготовок | 1991 |
|
SU1824524A1 |
| Конвейерные весы | 1980 |
|
SU901836A1 |
Изобретение относится к весоизмерительной технике. Цель изобретения -увеличение быстродействия устройства. Грузо- приемное устройство для весов встроено в гравитационный роликовый конвейер и содержит грузоприемную.платформу 1, рольганг 3, арретирующий механизм, выполненный в виде электромагнита 5, связанного посредством подпружиненной тяги 6 с ползуном 7, на котором закреплены упоры 8 с обрезиненной скошенной поверхностью, причем арретирующий механизм установлен на грузоприемной платформе под роликами рольганга с возможностью контакта упоров скошенной обрезиненной поверхностью с роликами рольганга. 3 ил.
Фив.З
Фи.2
| Устройство для транспортирования и взвешивания штучных грузов | 1947 |
|
SU74876A1 |
| Устройство для взвешивания предметов,перемещаемых роликовым транспортером | 1975 |
|
SU516911A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
