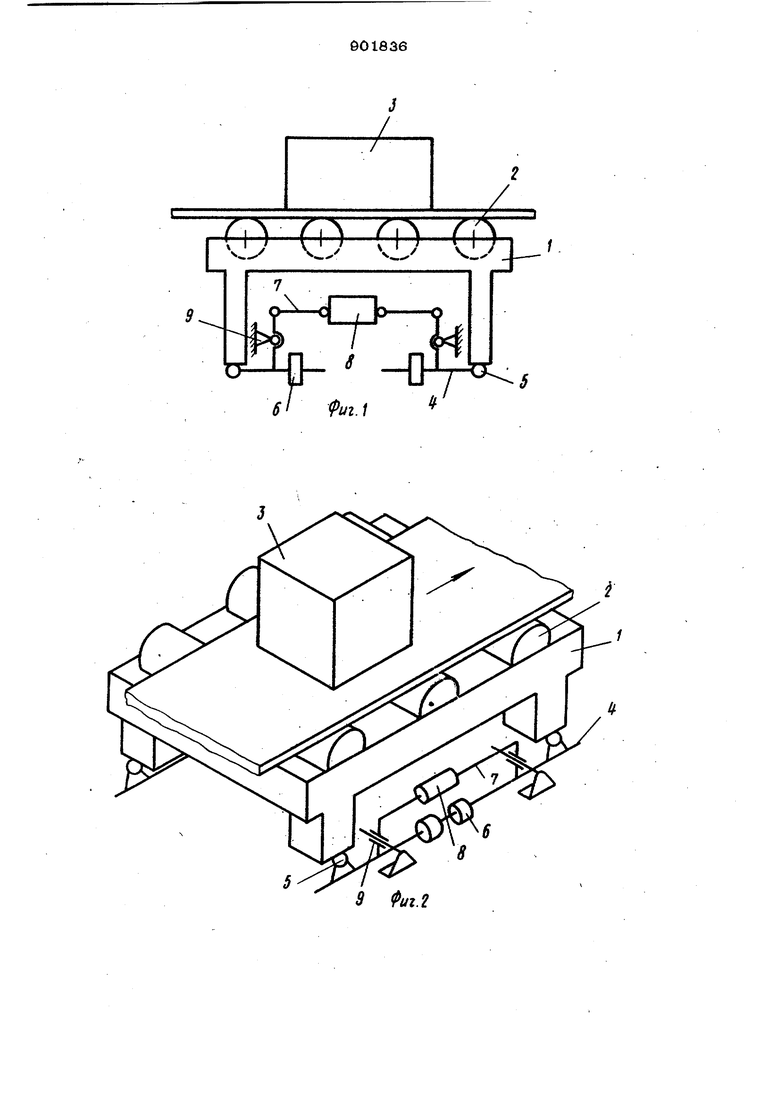
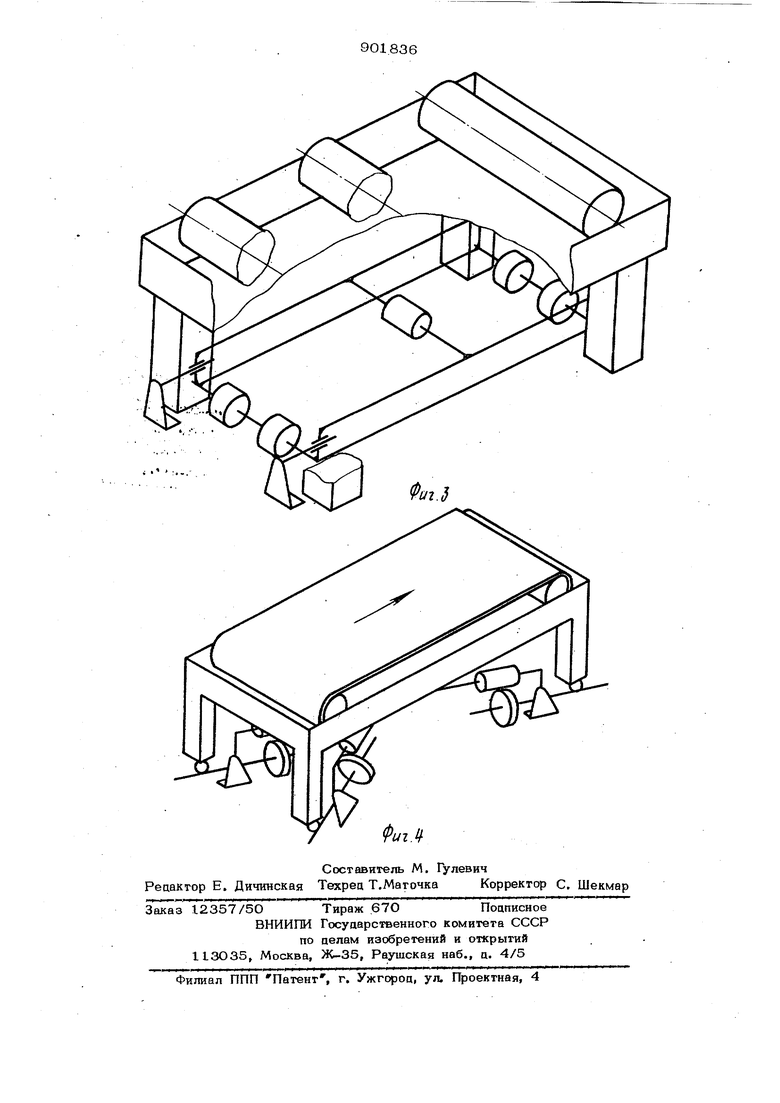
(54) КОНВЕЙЕРНЫЕ ВЕСЫ Изобретение относится к весоизмерительной технике и может быть использовано цля измерения массы движущихся объектов, впоточных технологических ли киях, в дозирующих и контрольно-сортировочных автоматах. Известны Конвейерные весы с площадкой, уравновешенной относительно оси, ко торая проходит через пару опор, расположенных вблизи одного из краев. При этом датчики располагаются над опорами, расположенными с противоположной стороны, а уравновешивание пустой площадки осуществляется за счет противовеса, вьгае- сенного за ось в противоположную относительно площадки сторону fl . Недостатком таких весов 5Шляется зависимость их показаний не только от величины находящегося на плсщадке груза, но и от положения его центра масс на платформе между осью поворота и точкой ее опирания на весовой датчик. Наиболее близким к предлагаемому является устройство, содержащее уравн(жешенную грузоприемную площадку,щар нирно установленную на горизонтальные плечи Т-образных рычагов, вертикальные плечи которых связаны с весовыми датчиками 2 . Недостатком устройства является отсутствие горизонтальной подвижности, и, слецсшательно, отсутствие возможности самоустанав;;иваться при случайных колебаниях положения центра масс груза на площадке, что приводит к снижению точности. Цель изобретения - повышение точности взвешивания. Поставленная цель достигается тем, что вертикальные плечи Т-образных рычагов установлены с возможностью поворота под нагрузкой в противоположных направлениях и попарно соединены между собой через весовой датчик с помощью шарниров, а точки опоры рычагов расположены выше точек их сочленения с грузоприе ной площадкой. Горизонтальные плечи Т-образных рычагов расположены 390 вдоль или поперек направления движения взвешиваемого обьекта. Горизонтальные плечи Т-образных рычагов расположены вдоль аиагоналей грузоприемной площадки. Вертикальные плечи Т-образных рычагов попарно жестко соединены. На фиг, 1 схематично представлены конвейерные весы; на фиг. 2 - конвейерные весы, изометрия; на фиг. 3 и 4 варианты расположения гс изонтальных плеч Т-образных рычагов. Конвейерные весы содержат грузо- приемную площадку I с роликоопорами 2,поддерживающими тяговую ветвь конвейера, переносящую взвещиваемый груз 3.Каждая из четырех опор площадки связана с горизонтальным Т-образным рычагом 4 с помощью шарниров 5, На противоположных концах этих плеч установлены противовесы 6. Вертикальные Плечи рьгаагов щарнирно связаны при помощи тяг 7 с весовыми датчиками 8. Опорные оси 9 расположены выще щар- ниров 5. Весы работают следующим образом. Под действием взвещиваемого груза 3 вертикальные плечи рычагов поворачиваются в противоположные стороны. Соединенные с каждой парой таких плач весовые датчики 8 гфепятствуют этому перемещению, нагружаются суммой усили пропорциональных двум опфным реакциям грузоприемной площадки, и выдают соответствующий им электрический сигна Сигналы двух установленных в весах датчиков электрически складьюаются, эта сумма пропорциональна массе груза 3, независимо от места его расположения на плгацадке. Каждая опорная реакция пустой грузоприемной площадки скомпенсирсжана про - тивовесом 6, в результате чего весовые датчики 3 воспринимают только нагрузку гфопорциональную массе груза 3. Горизонтальные плечи Т-образных рычагов могут располагаться вдоль направ ления движения взвещиваемого обьекта п площадке (фиг. I и 2), поперек этого направления (фиг. 3), а такжевдоль диаго налей грузоприемной плсщадки (фиг. 4). Возможно также жесткое механическое соединение поворачивающихся в одно направлении вертикальных Т-образных рычагов и замыкание всех усилий на оди весовой датчик (фиг. 3). 6 На грузоприемной площадке могут располагаться секции разнообразных транспортеров - ролики, поддерживающие тяговую ветвь длинного ленточного конвейера (фиг. I и 2), короткий автономный ленточный конвейер (фиг. 4), ролики рольганга (фиг. 3) и т.д. Обеспечиваемая конструкцией возможность самоустановки грузоприемной площадки под измеряемой нагрузкой позволяет повысить точность конвейерных весов. Кроме того, сокращение числа активно работающих элементов (в данном случае за счет соединительных тяг между вертикальными плечами Т-образных рычагов) приводит к повьпдению надежности весов. Формула изобретения 1.Конвейернь весы, содержащие уравновешенную грузоприемную площадку, шарнирно установленные на горизонтальные плечи Т-образных рычагов, вертикальные плечи которых связаны с весовыми датчиками, отличающиеся тем, что, с целью повышения точности взвешивания, вертикальные плечи Т-образных рычагов установлены с возможностью поворота под нагрузкой в противоположных направлениях и попарно соединены между собой через весовой датчик с помощью шарниров, а точки оперы рьпагов расположены выше точек их сочленения с грузоприемной плсяцадкой. 2,Весы по п. 1, отличающиеся тем, что горизонтальные плечи Т-образных рычагов расположены вдоль или поперек направления движения взвешиваемого обьекта. 3.Весы ПОП.1, отличающиеся тем, что горизонтальные плечи Т-образных рычагов расположены вдоль диагоналей грузоприемной площадки. 4.Весы по пп. I и 2, отличающиеся тем, что вертикальные плечи Т-образных рычаге попарно жестко соединены. Источники информации, принятые во внимание при экспертизе 1.Карпин. Е. Б. Средства автоматизации для измерения и дозирования массы. М., Машиностроение 1971, с. 424. 2.Авторское свидетельство СССР № 561090, кл. GOIG 11/00, 1976 (гфототип).
ГО (I) Г|)
fl (риг.
/

| название | год | авторы | номер документа |
|---|---|---|---|
| Конвейерные весы | 1982 |
|
SU1242717A1 |
| КОНВЕЙЕРНЫЕ ВЕСЫ | 2002 |
|
RU2232979C2 |
| Конвейерные весы | 1976 |
|
SU561090A1 |
| СПОСОБ НЕПРЕРЫВНОГО ИЗМЕРЕНИЯ ВЕСА ПЕРЕМЕЩАЕМЫХ МАТЕРИАЛОВ НА ЛЕНТОЧНЫХ КОНВЕЙЕРАХ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И ВЕСОВАЯ РОЛИКООПОРА ЛЕНТОЧНОГО КОНВЕЙЕРА | 2009 |
|
RU2401994C1 |
| Конвейерные весы | 1990 |
|
SU1735723A1 |
| Конвейерные весы | 1983 |
|
SU1439409A1 |
| Конвейерные весы | 1987 |
|
SU1587343A1 |
| Аппарат для автоматического взвешивания,дозирования и упаковки штучных пищевых продуктов | 1972 |
|
SU518637A1 |
| Способ поверки конвейерных весов | 1989 |
|
SU1663445A1 |
| Конвейерные весы конвейеров прямого и реверсивного хода | 2016 |
|
RU2625042C1 |