Изобретение относится к станкостроению и может быть использовано в автоматических металлорежущих станках.
Цель изобретения - повышение надежности в работе и жесткости фиксирования шпинделя за счет обеспечения нормированного, контролируемого усилия сжатия плоскозубчатых муфт.
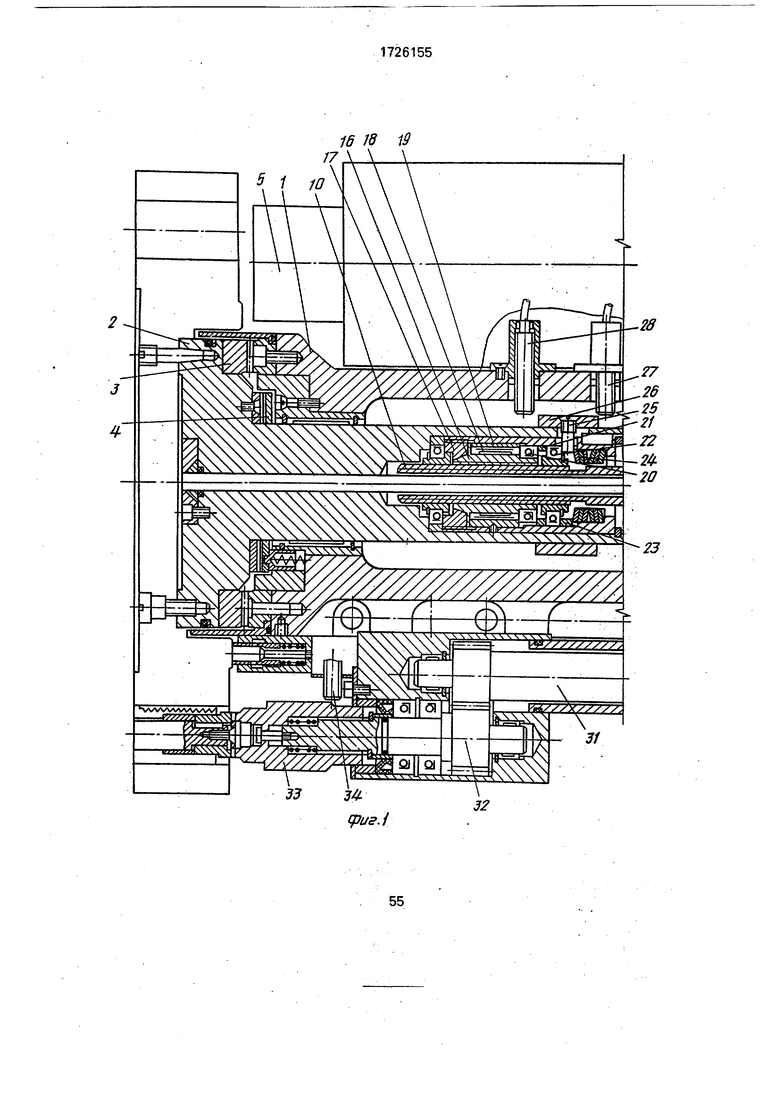
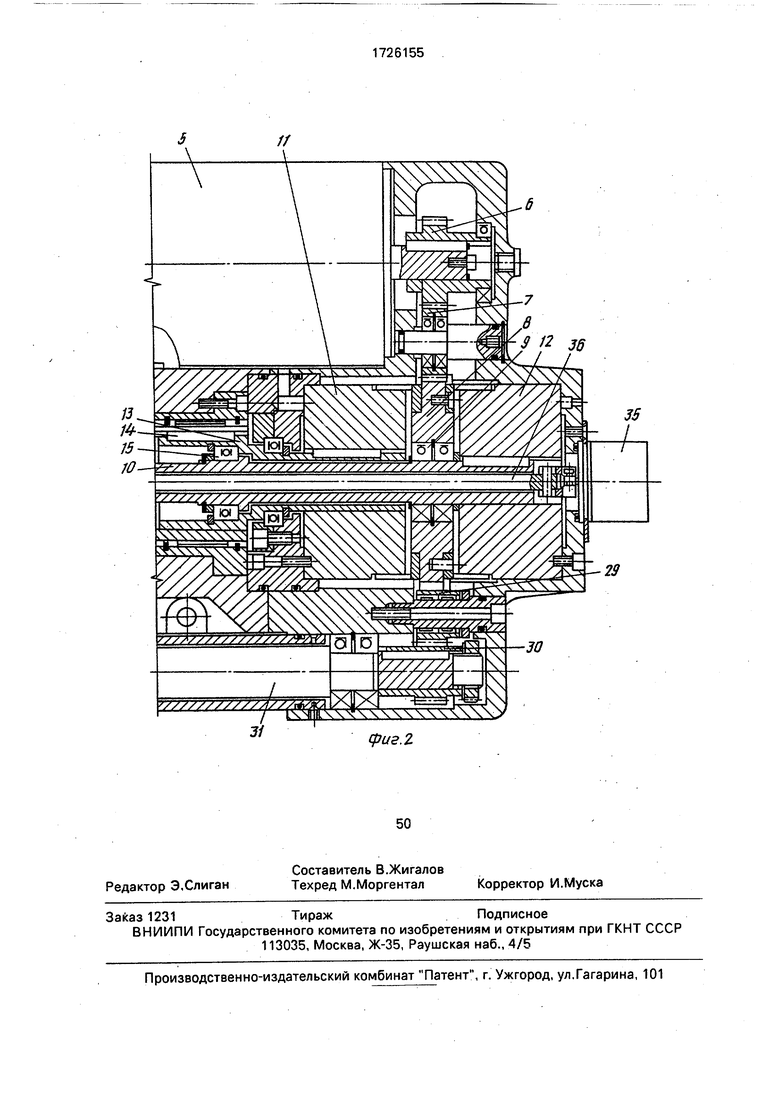
На фиг.1 показана передняя часть головки с преобразователем усилия зажима шпинделя; на фиг.2 - привод головки с преобразователем углового перемещения.
Револьверная головка содержит корпус 1, шпиндель 2, плоскозубчатые муфты 3, кулачковые муфты 4, связывающие шпиндель 2 с корпусом 1 в рабочих позициях, электродвигатель 5 подач, который через шестерни 6 и 7 соединен с колесом 8, которое на подшипниках 9 установлено на винте 10.
Колесо 8 может соединиться электромагнитными муфтами 11 и 12 с валом 13 привода вращения шпинделя 2 через шпонку 14 и винтом 10 соответственно. Осевое усилие винта воспринимается упорным подшипником 15, винт 10 взаимодействует с гайкой 16, которая удерживается кольцом 17, может вращаться в подшипнике 18, который устанавливается в эксцентриковой втулке 19. Осевое усилие зажима плоскозубчатой муфты 3, развиваемое гайкой 16, передается через упорный подшипник 20, кольцо 21, наружную обойму подшипника 22, кольцо 23 на тарельчатые пружины 24, деформация пружин воспринимается через винт 25 и кольцо 26 бесконтактным датчиком 27 зажима головки.
Перемещение кольца 26 в другую сторону контролируется бесконтактным датчиком 28 в момент размыкания плоскозубчатой муфты 3. Зубчатое колесо 8 кинематически, через шестерни 29 и 30, через вал-шестерни 31 и 32 связано с муфтой включения вращения инструмента в рабочей позиции 33. Это включение фиксируется датчиком 34. Поворот и позиционирование шпинделя 2 передается на преобразователь угловых перемещений 35 через стержень 36.
Револьверная головка работает следующим образом.
При включении электродвигателя 5 подач в направлении отжима по команде системы управления (не показана) вращение через шестерни 6 и 7 передается колесу 8. По команде системы управления включаетсл С
4 Ю ON
icn
СЛ
ся электромагнитная муфта 12 и вращение передается на винт 10, при этом гайка 16 свинчивается, перемещая шпиндель 2 в осевом направлении до момента попадания кольца 26 в зону срабатывания бесконтакт- ного датчика 28. После этого включается электромагнитная муфта 11, которая передает вращение от колеса 8 на вал 13, и через шпонку 14 вращается шпиндель 2, который через стержень 36 связан с преобразовате- лем 35 угловых перемещений. Сигналы угло- вых перемещений воспринимаются системой управления, и она в нужной позиции с помощью двигателя 5 подач останавливает шпиндель 2 и дает команду на отключение электромуфты 11 и включение вращения двигателя 5 подач в направлении зажима. Шпиндель 2 удерживается в нужной позиции муфтой 4. Это так называемая предварительная фиксация, Вращение пе- редается через шестерни 6 и 7, колесо 8, электромагнитную муфту 12 на винт 10. Гайка 16, наворачиваясь на винт 10, через упорный подшипник 20, кольцо 21, наружную обойму подшипника 22, кольцо 23, тарель- чатые пружины 24 перемещает шпиндель 2 до момента смыкания плоскозубчатой муфты 3. В этот момент гайка 16 удерживается от вращения кольцом 17, которое предварительно сжимает через гайки 16, упорный подшипник 20, кольцо 21, наружную обойму подшипника 22, кольцо 23, тарельчатые пружины 24.
При сжатии плоскозубчатых муфт 3 с усилием больше усилия предварительного сжатия тарельчатых пружин 24 гайка 16 получает возможность вращаться в подшипнике 18, обкатываясь по винту 10. Таким образом, вращение винта 10 преобразуется в осевое сжатие плоскозубчатых муфт с по- мощью известной передачи по формуле d2 Т
D2-1
1 S где h - ход передачи;
S - шаг резьбы винта и гаек;
5 10 15 0 5 0
5 0
5
d2 - средний диаметр резьбы винта;
D2 - средний диаметр резьбы гайки .
Осевое усилие сжатия плоскозубчатых муфт 3, развиваемое гайкой 16, воспринимается преобразователем усилия зажима шпинделя при фиксации, выполненным в виде тарельчатых пружин 24 и датчика 27, и с помощью винта 25 перемещает кольцо 26, которое при достижении усилия сжатия плоскозубчатых муфт взаимодействует с бесконтактным датчиком 27. При этом электромагнитная муфта 12 отключается. Одновременно происходит заклинивание винта 10 и гайки 16 по резьбе за счет самоторможения.
Двигатель 5 подач включается системой управления на необходимые режимы для привода вращения инструмента в рабочей позиции. Зубчатое колесо 8 передает вращение на муфту включения вращения в рабочей позиции инструмента 33 через шестерни 29 и 30, через вал-шестерни 31 и 32; это включение вращения фиксируется датчиком 34.
Формула изобретения Револьверная головка, содержащая установленный в корпусе шпиндель, соединенный кинематической цепью с электродвигателем, плоскозубчатые муфты позиционирования шпинделя, датчик позиционирования, выполненный в виде преобразователя угловых перемещений шпинделя, отличающ а я с я тем, что, с целью повышения надежности работы и жесткости фиксирования шпинделя, кинематическая цепь снабжена двумя управляе- мыми электромагнитными муфтами, установленными между электродвигателем и цепями деления и фиксирования шпинделя, а головка также снабжена преобразователем усилия зажима при фиксации шпинделя, выполненным в виде пары винт - гайка с подпружиненной в осевом направлении гайкой, и преобразователем осевого перемещения шпинделя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Инструментальная револьверная головка | 1987 |
|
SU1484457A1 |
| РЕВОЛБВЕРНАЯ ГОЛОВКА | 1969 |
|
SU234106A1 |
| Револьверная головка Барановского В.В. | 1990 |
|
SU1818173A1 |
| Револьверная головка | 1989 |
|
SU1757782A1 |
| Револьверная головка | 1990 |
|
SU1787697A1 |
| РЕВОЛЬВЕРНАЯ ГОЛОВКА | 1988 |
|
RU2044608C1 |
| Автоматическая многорезцовая головка | 1986 |
|
SU1395429A1 |
| Устройство для непрерывной намотки нитевидного материала на катушки | 1977 |
|
SU679500A1 |
| Механизм зажима и подачи прутка токарного многошпиндельного автомата | 1977 |
|
SU657917A1 |
| Револьверная головка | 1988 |
|
SU1593785A1 |
Изобретение может быть использовано в станкостроении, автоматических металлорежущих станках. Цель изобретения - повышение надежности работы и жесткости фиксирования шпинделя. Револьверная головка содержит шпиндель, который соединен через электромагнитные муфты с двигателем. Преобразователь усилия зажима при фиксации шпинделя выполнен в виде передачи винт - гайка с подпружиненной гайкой.2 ил.
| Револьверная головка | 1986 |
|
SU1342611A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
