Изобретение относится к вычислительной технике и может использоваться в системах функционального диагностирования для контроля хода программ и микропрограмм.
Цель изобретения - повышение достоверности контроля.
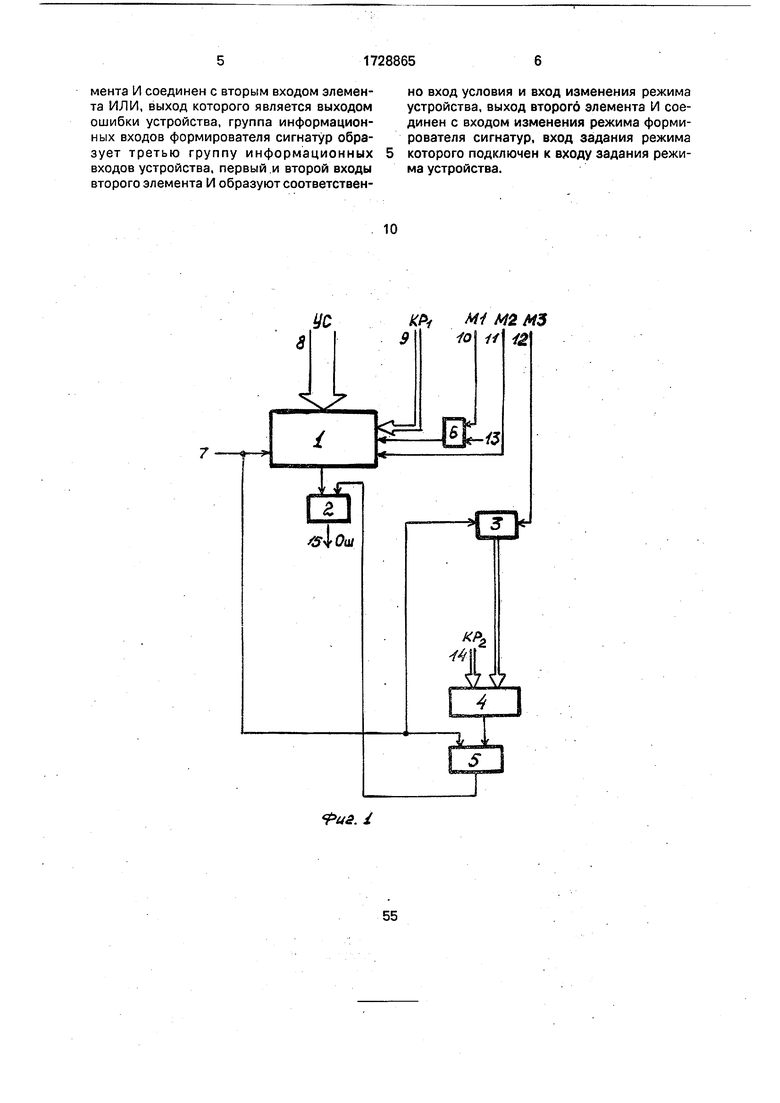
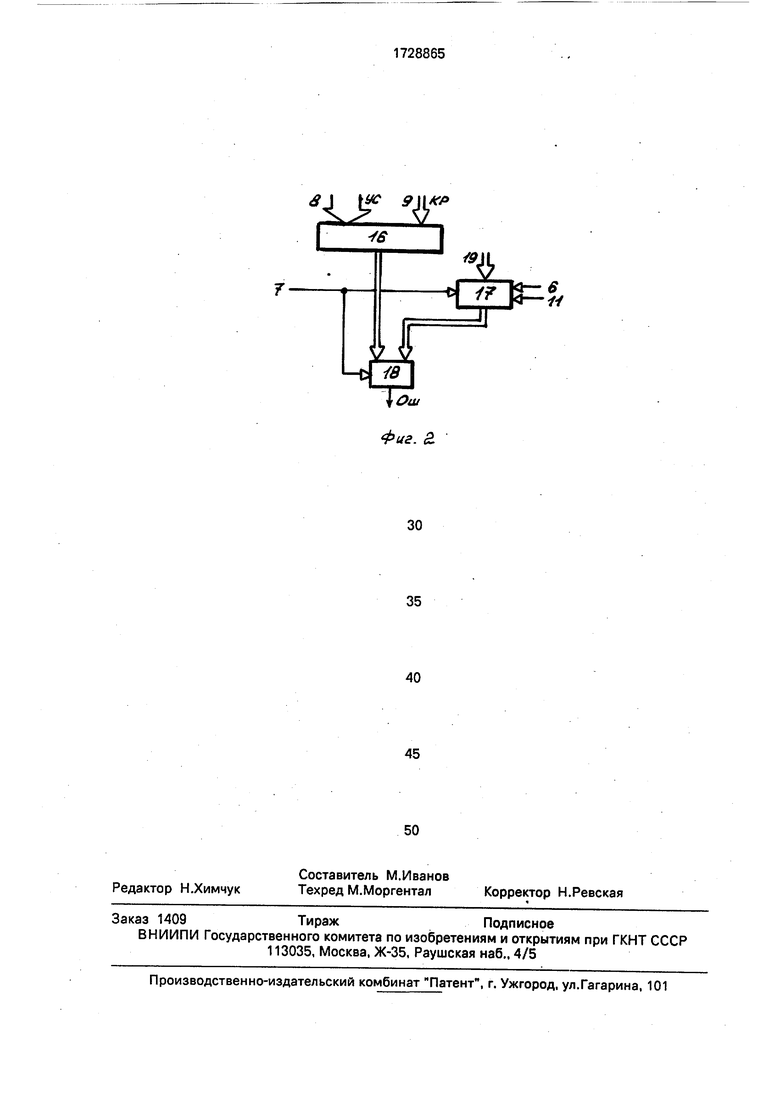
На фиг.1 приведена структурная схема устройства для контроля хода микропрограмм; на фиг.2 - вариант схемы формирователя сигнатур.
Устройство для контроля хода микропрограмм (фиг.1) содержит формирователь 1 сигнатур, элемент ИЛИ 2, счетчик 3, блок 4 сравнения, элементы И 5,6, тактовый вход 7, первую группу 8 и вторую группу 9 информационных входов, вход 10 изменения режима, вход 11 задания режима, вход 12 разрешения, вход 13 условия, третью группу информационных входов 14, выход 15 сигнала ошибки.
При контроле хода программ каждая микрокоманда (МК) должна содержать помимо адресного поля и поля управляющих сигналов (УС) (микроопераций) поля: KPi и КР2 контрольных разрядов, М1 -метки МК, в которых происходит анализ сигнала условия (У), М2 - метки МК, соответствующих точкам слияния ветвей. МЗ - метки МК, в которых происходит изменение состояния счетчика 3 участков.
Вариант схемы формирователя 1 сигнатур (фиг.2) содержит блок 16 пространственного сжатия информации (БПС), генератор псевдослучайных ходов (ГПК) 17 и блок 18 сравнения. На группу информационных входов 19 формирователя подается код с выходов шифратора, который преобразует состояние ГПК 17 в код, обеспечивающий выравнивание состояний ГПК в точках слияния ветвей.
Перед началом работы формирователь 1 и счетчик 3 устанавливаются в исходное состояние, например в нулевое. Цепи установки начального состояния на фиг.1 условно не показаны.
VI
to
00 00
о ел
Контроль хода микропрограмм осуществляется путем сравнения сигнатуры, сформированной из всех микрокоманд, предшествующих очередной и считанных ранее из памяти микропрограмм, с кодовым эталоном, извлекаемым из поля контрольных разрядов KR регистра МК. Если полученный в формирователе сигнатур контрольный код совпадает с эталонной сигнатурой, считанной из поля KPi регистра МК, делается вывод, что микропрограмма выполняется правильно, в противном случае на выходе формирователя 1 появляется сигнал ошибки. Подобным образом устройство функционирует только при воспроизведении линейных, а также ветвящихся участков программы, не содержащих точек слияния ветвей. В этом случае каждой МК может быть поставлена в соответствие только одна сигнатура. Указанное обстоятельство дает возможность вычислить и разместить заранее в поле контрольных разрядов KPi блока памяти микропрограмм массив эталонных сигнатур, а затем использовать их.
Чтобы обеспечить контроль хода программы, имеющей точки слияния ветвей, каждой из указанных точек ставится в соответствие свое вполне определенное начальное состояние формирователя 1, своего рода код-идентификатор данной точки слияния. При этом в поле KPi МК, соответствующих точкам слияния ветвей, хранятся начальные состояния формирователя 1, соответствующие указанным точкам. Шифратор, входящий в состав формирователя 1, преобразует код сигнатуры,-полученной после прохождения точек микропрограммы, предшествующих точке слияния, в код начального состояния формирователя 1. Каждому выходному коду указанного шифратора соответствует несколько входных - по числу ветвей, сходящихся е данной точке слияния.
В процессе выполнения микропрограммы в каждый момент считывания МК, соответствующей точке слияния ветвей, на блок сравнения, входящий в состав формирователя 1, поступает не текущее значение сигнатуры, а код с выходов шифратора. Аналогично в формировании следующего значения сигнатуры участвует код-инденти- фикатор соответствующей точки слияния. Если код начального состояния формирователя 1, считанный из поля KPi регистра МК, не совпадает с кодом-идентификатором, полученным на выходе шифратора на основе анализа предшествующего поведения МПУУ, значит произошла замена одной точки слияния другой и на выходе формирователя 1 появляется сигнал ошибки.
Исключить необнаруживаемые переходы в микропрограмме можно, если разбить ее на участки таким образом, чтобы на каждом из участков отсутствовали повторяющиеся состояния формирователя 1. В результате в случае любого из ранее не обнаруживаемых неправильных переходов состояние счетчика 3 будет отличаться от ожидаемого, считанного из поля КР2 регист0 ра МК. На выходе блока 4 появится сигнал Лог. 1, поэтому после прихода очередного тактового импульса на выходе элемента 5 появится сигнал ошибки.
Другой возможный вариант исключения
5 необнаруживаемых неправильных переходов в микропрограмме - это использование формирователя сигнатур, показанного на фиг.2. Если в первом случае, рассмотренном на фиг.1, код KPi -это код эталонной сигна0 туры (или код-идентификатор точки слияния ветвей), то для случая, рассмотренного на фиг.2, код со входов 9 подбирается заранее таким образом, чтобы после свертки кодов УС и КР в блоке пространственного сжатия
5 16, на выходе последнего сформировался код текущего состояния ГПК 17. Для обнаружения всех неправильных переходов в программе необходимо только, чтобы число состояний ГПК было больше или равно чис0 лу микрокоманд.
Таким образом, положительный эффект от использования изобретения заключается в повышении достоверности контроля путем обнаружения всех неправильных пере5 ходов в микропрограмме.
Формула изобретения Устройство для контроля хода микропрограмм, содержащее формирователь сигнатур, первый элемент И и блок сравнения,
0 выход которого соединен с первым входом первого элемента И, первая группа входов блока сравнения подключена к первой группе информационных входов устройства, второй вход первого элемента И соединен с
5 тактовым входом формирователя сигнатур и образует тактовый вход устройства, первая группа информационных входов формирователя сигнатур образует вторую группу информационных входов устройства, от л и0 чающееся тем, что, с целью повышения достоверности контроля, устройство содержит элемент ИЛИ, второй элемент И и счетчик, группа разрядных выходов которого соединена с второй группой входов блока
5 сравнения, тактовый вход счетчика подключен к тактовому входу устройства, вход разрешения счетчика подключен к входу разрешения устройства, выход ошибки формирователя сигнатур соединен с первым входом элемента ИЛИ, выход первого элемента И соединен с вторым входом элемента ИЛИ, выход которого является выходом ошибки устройства, группа информационных входов формирователя сигнатур образует третью группу информационных входов устройства, первый .и второй входы второго элемента И образуют соответственно вход условия и вход изменения режима устройства, выход второго элемента И соединен с входом изменения режима формирователя сигнатур, вход задания режима которого подключен к входу задания режима устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля хода микропрограмм | 1990 |
|
SU1734096A1 |
| Устройство для контроля хода программ | 1987 |
|
SU1578713A1 |
| Устройство для контроля хода программ | 1987 |
|
SU1508215A1 |
| Устройство для контроля цифровых узлов | 1983 |
|
SU1166120A1 |
| Устройство для контроля и диагностики цифровых блоков | 1982 |
|
SU1067506A1 |
| Микропрограммное устройство управления модуля вычислительной системы | 1982 |
|
SU1034037A1 |
| Устройство автоматизированной подготовки программ для станков с ЧПУ | 1986 |
|
SU1354160A1 |
| Устройство для контроля цифровых узлов | 1984 |
|
SU1231506A1 |
| Устройство для контроля цифровых узлов | 1985 |
|
SU1238085A2 |
| Процессор программируемого контроллера | 1985 |
|
SU1406595A1 |
Изобретение относится к вычислительной технике и может использоваться в системах функционального диагностирования микроЭВМ. Цель изобретения - повышение достоверности контроля. Устройство содержит формирователь, сигнатур, блок памяти, два элемента И, элемент ИЛИ, блок сравнения. При использовании устройства программа или микропрограмма разбиваются на участки, на каждом из которых отсутствуют повторяющиеся состояния формирователя сигнатур. В результате все неправильные переходы в программе или микропрограмме будут обнаружены. 2 ил.
УС
8
JL
/S+Ош
PU2.1
Kfy Mi MU MS
10
//
/Ј
Z
1 ЦП
г Ц
Co
| Авторское свидетельство СССР № 1300479, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для контроля хода программ | 1987 |
|
SU1508215A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
