Изобретение относится к сельскохозяйственному машиностроению, в частности к конструкции улавливающего устройства ягодоуборочной машины.
Цель изобретения - повышение полноты улавливания ягод и снижение повреждений растений.
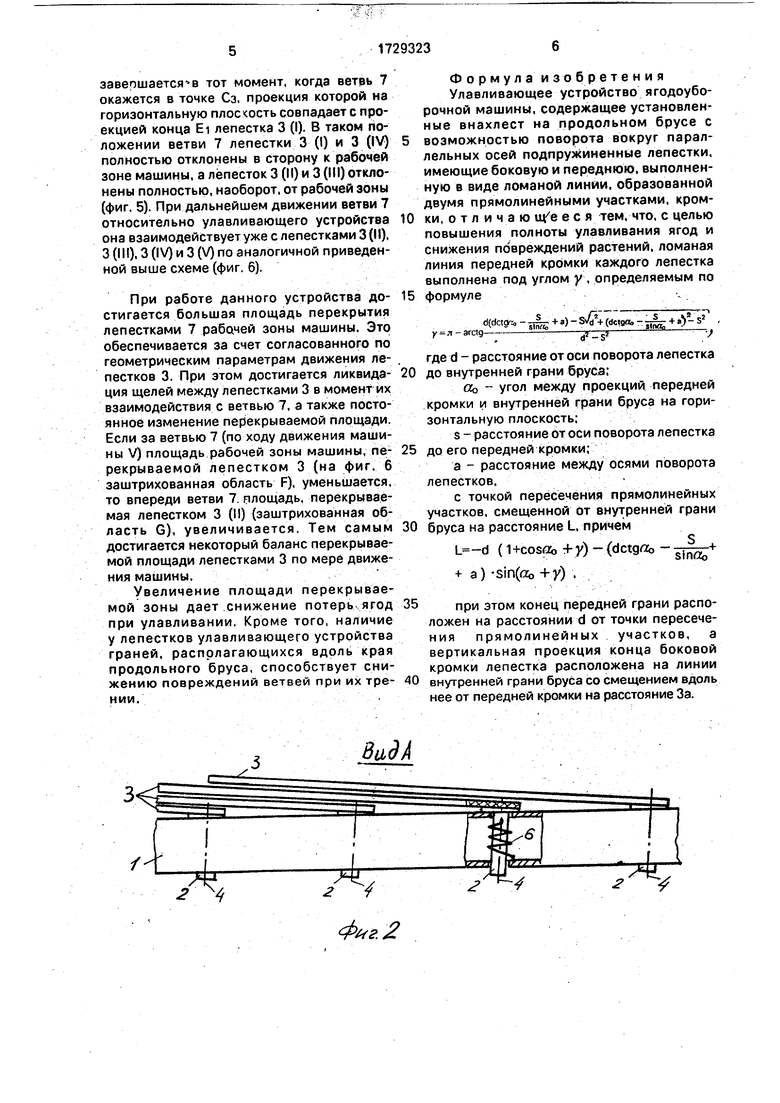
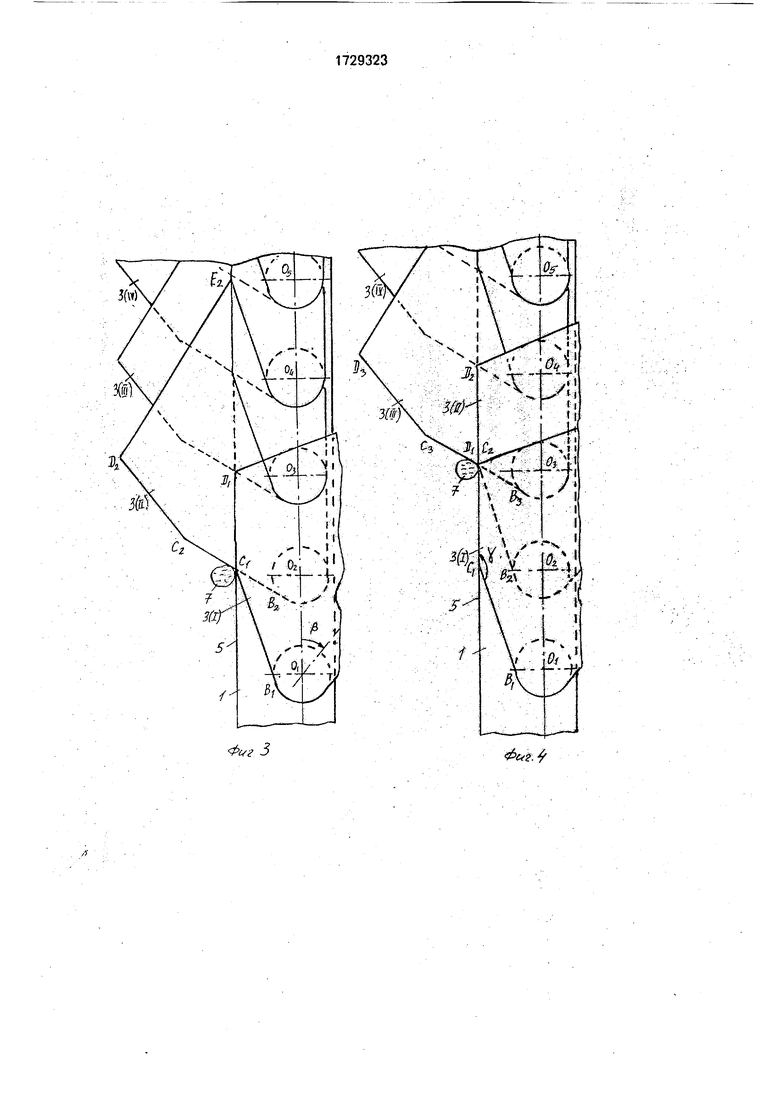
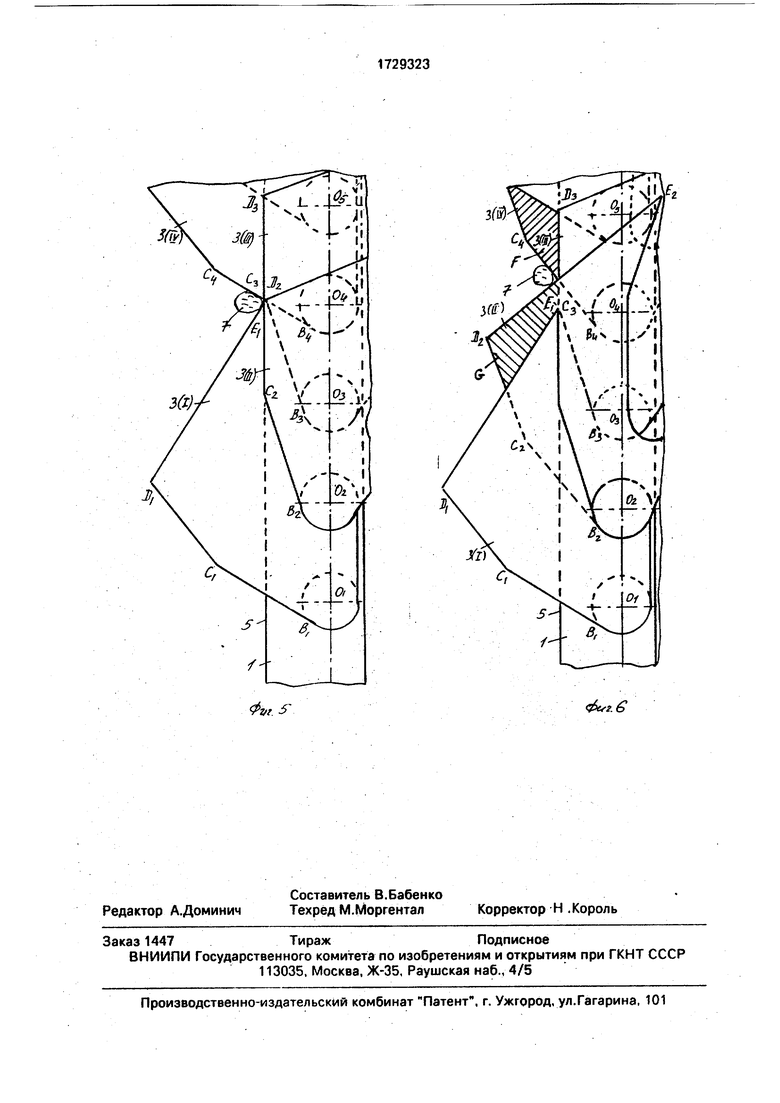
На фиг. 1 представлено устройство, вид сверху; на фиг. 2 - вид А на фиг. 1; на фиг. 3, 4, 5 и 6 - схема процесса взаимодействия лепестков улавливающего устройства с ветвью.
Улавливающее устройство ягодоуборочной машины содержит установленный параллельно направлению движения машины V продольный брус 1, на котором размещены пальцы 2 крепления лепестков 3. Оси 4 пальцев 2 расположены в одной плоскости, параллельной краю 5 бруса 1, и имеют одинаковый наклон к его верхней поверхности. На пальцах 2 установлены пружины 6 кручения, возвращающие лепестки 3 в начальное положение после их принудительного отвода в сторону от рабочей зоны машины. Расстояние между осями 4 одинаково по всей длине бруса и равно а. Линия ОЮа, вдоль которой расположены оси 4, отстоит от грани 5 бруса 1 на расстояние d. Каждый лепесток 3 имеет переднюю кромку ВД, состоящую из двух прямолинейных участков ВС и СД. Расстояние от оси 4 (т.е. точки 00 до передней кромки составляет S, а угол, образуемый проекцией участка ВС передней кромки ВД и гранью 5 бруса 1 на горизонтальную плоскость составляет Оо Угол между участками ВС и СД определяется выражением
d{clCK} - - |-- + а) - S/o H. (ar.tv,a - -JL- + л ). s у-я -arag--- --..--.. .
причем вершина С образованного угла отстоит от грани 5 продольного бруса 1 на расстояние
1 -d (1 +cos«o + у) - (dctgao - + a) -sin(ab +y) ,
Длина участка СД передней кромки ВД лепестка 3 равна а, а вертикальная проекция конца Е боковой кромки ДЕ лежит на линии грани 5 бруса 1 со смещением вдоль нее от передней кромки на расстояние 3 а.
Улавливающее устройство ягодоуборочной машины работает следующим образом.
Ягодоуборочная машина, содержащая предлагаемое улавливающее устройство, двигаясь в направлении V в рабочей зоне, встречает куст, контактируя в начальный момент времени передней кромкой ВС лепестка 3 с ветвью 7 (фиг. 1). Последующее
движение машины в направлении V приводит к взаимодействию лепестков 3 и куста 6. На предлагаемой схеме взаимодействия лепестков 3 с кустом 6 (фиг. 3. 4, 5 и 6) будем
рассматривать лишь одну ветвь 7, считая, что другие ветви, находящиеся у грани 5 бруса 1 будут воздействовать на лепестки 3 таким же образом, как и одиночная ветвь 7, при этом увеличивая лишь зону контакта
ветвей с лепестками 3. Так как в процессе работы с ветвью 7 будут взаимодействовать несколько лепестков 3, то для удобства описания процесса первый по ходу движения лепесток 3 будем обозначать с добавлением
римской цифры 3 (I), второй - 3 (II), третий - 3(111) и т.д., а соответствующие им элементы буквами с аналогичными индексами (Bid, C2D2, ЕЗ и т.д.).
После возникновения контакта с передней кромкой BiCi лепестка 3 (I) ветвь 7, скользя вдоль грани 5 бруса 1, воздействует на кромку ВiCi, заставляя лепесток 3 (I) поворачиваться вокруг оси 4 в точке Oi в сторону от рабочей зоны машины (фиг. 3).
Поворот лепестка 3 (I) будет осуществляется до тех пор, пока ветвь 7 не достигнет точки Ci. К этому моменту времени лепесток 3 () повернется на угол , а проекция его передней грани CiDi на горизонтальную плоскость совпадает с проекцией грани 5 бруса 1 на ту же плоскость (фиг. 3). Достигнув точки Ci, ветвь 7 встречает на своем пути переднюю кромку ВаС2 лепестка 3 (II) и при дальнейшем своем движении постепенно
отклоняет лепесток 3 (II) также в сторону от рабочей зоны машины, при этом лепесток 3 (I) неподвижен, хотя ветвь 7 и скользит вдоль его грани CiDi. Контактное усилие лепестка 3 () и ветви 7 на этом участке по
мере продвижения последних от точки Ci к точке DI снижается, поэтому снижается и вероятность повреждения ветви 7 вследствие трения о кромку CiDi. Достигнув точки DL а соответственно, и точки С 1 лепестка 3
(II), ветвь 7 повернут последний, так как и лепесток 3 (I) на угол/ (фиг. 4).
Дальнейшее движение ветви 7 вдоль грани 5 бруса 1 будет сопровождаться контактом ветви 7 с кромками лепестков 3 (I). 3
(II) и 3 (III). От взаимодействия ветви 7 с кромкой ВзСз лепесток 3 (III) будет повора- . чиваться в сторону от рабочей зоны машины; лепесток 3 (И) будет неподвижен (контакт осуществляется с кромкой C2D2);
лепесток 3 (I) начнет обратный ход в сторону к рабочей зоне машины. Величина обратного хода лепестка 3 (I) зависит от точки контакта ветви 7 с боковой кромкой DiEi лепестка 3 (I). Обратный ход лепестка 3 (I)
завершается в тот момент, когда ветвь 7 окажется в точке Сз. проекция которой на горизонтальную плоскость совпадает с проекцией конца EI лепестка 3 (I). В таком положении ветви 7 лепестки 3 (I) и 3 (IV) полностью отклонены в сторону к рабочей зоне машины, а лепесток 3 (II) и 3 (III) отклонены полностью, наоборот, от рабочей зоны (фиг. 5). При дальнейшем движении ветви 7 относительно улавливающего устройства она взаимодействует уже с лепестками 3 (И), 3 (III). 3 (IV) и 3 (V) по аналогичной приведенной выше схеме (фиг. 6).
При работе данного устройства достигается большая площадь перекрытия лепестками 7 рабочей зоны машины. Это обеспечивается за счет согласованного по геометрическим параметрам движения лепестков 3. При этом достигается ликвида- ция щелей между лепестками 3 в момент их взаимодействия с ветвью 7, а также постоянное изменение перекрываемой площади. Если за ветвью 7 (по ходу движения машины V) площадь рабочей зоны машины, ле- рекрываемой лепестком 3 (на фиг. 6 заштрихованная область F), уменьшается, то впереди ветви 7. площадь, перекрываемая лепестком 3 (II) (заштрихованная область G), увеличивается. Тем самым достигается некоторый баланс перекрываемой площади лепестками 3 по мере движения машины.
Увеличение площади перекрываемой зоны дает снижение потерь ягод при улавливании. Кроме того, наличие у лепестков улавливающего устройства граней, располагающихся вдоль края продольного бруса, способствует снижению повреждений ветвей при их тре-
НИИ..
Формула изобретения Улавливающее устройство ягодоубо- рочной машины, содержащее установленные внахлест на продольном брусе с возможностью поворота вокруг параллельных осей подпружиненные лепестки, имеющие боковую и переднюю, выполненную в виде ломаной линии, образованной двумя прямолинейными участками, кромки, о т л и ч а ю ш/е е с я тем, что, с целью повышения полноты улавливания ягод и снижения повреждений растений, ломаная линия передней кромки каждого лепестка выполнена под углом у , определяемым по формуле....
5 -&Ј
.л-атаД - + а)
+(, + а)-5;
где d - расстояние от оси поворота лепестка до внутренней грани бруса;
OQ - угол между проекций передней кромки и внутренней грани бруса на горизонтальную плоскость;
s - расстояние от оси поворота лепестка до его передней кромки;
а - расстояние между осями поворота лепестков.
с точкой пересечения прямолинейных участков, смещенной от внутренней грани бруса на расстояние L, причем
с
L -d (1 +cosob + у)-(dctgob - + + a) -sin(oo +-У) .
при этом конец передней грани расположен на расстоянии d от точки пересечения прямолинейных участков, а вертикальная проекция конца боковой кромки лепестка расположена на линии внутренней грани бруса со смещением вдоль нее от передней кромки на расстояние За.
| название | год | авторы | номер документа |
|---|---|---|---|
| Улавливающее устройство ягодоуборочной машины | 1983 |
|
SU1158082A1 |
| Улавливающее устройство | 1986 |
|
SU1329664A2 |
| Улавливающее устройство ягодоуборочной машины | 1979 |
|
SU871762A1 |
| Улавливатель ягодоуборочной машины | 1987 |
|
SU1508991A1 |
| ЯГОДОУБОРОЧНАЯ МАШИНА | 1999 |
|
RU2153243C1 |
| Улавливающее устройство ягодоуборочной машины | 1983 |
|
SU1093285A1 |
| ЯГОДОУБОРОЧНАЯ МАШИНАВПТ51 ^^'^^;^Д ттт I | 1972 |
|
SU453154A1 |
| Встряхиватель ягодоуборочной машины | 1985 |
|
SU1335174A1 |
| ЯГОДОУБОРОЧНАЯ МАШИНА | 1971 |
|
SU297343A1 |
| Улавливающее устройство | 1985 |
|
SU1271432A1 |
Изобретение относится к области сельскохозяйственного машиностроения, в частности к машинам для сбора ягод/Цель изобретения - повышение полноты улавливания ягод и снижение повреждений растений. Улавливающее устройство ягодоуборочной машины содержит установленные внахлест на продольном брусе 1 лепестки 3. имеющие возможность отклонения в сторону от рабочей зоны машины. Передняя кромка ВС лепестка 3 выполнена ломаной и состоит из двух прямолинейных участков ВС и СД, угол между которыми равен у, а точка С смещена от грани 5 бруса 1 на расстояние L. При этом длина СД передней кромки грани равна межцентровому расстоянию а расстановки лепестков 3, а расстояние между передней кромкой ВД и концом Е задней кромки грани ЕД вдоль линии грани 5 составляет 3 а. При полном отклонении лепестка 3 в сторону от рабочей зоны машины участок СД совпадает с гранью 5, а конец Д передней кромки грани СД проецируется на переднюю кромку последующего лепестка 3. 6 ил. ч W Ё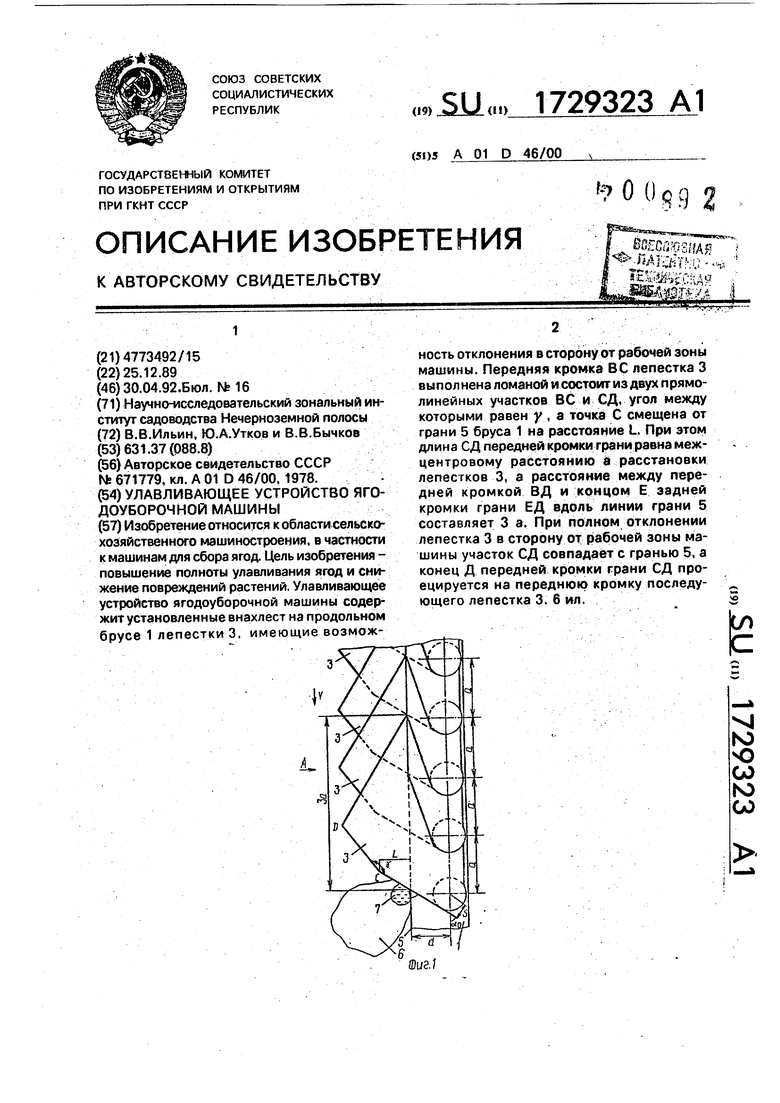
Вид А
Фиг 3
. f
Фъ1. 5
.6
| Улавливающее устройство ягодоуборочной машины | 1978 |
|
SU671779A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
