Изобретение относится к транспортным средствам, а именно к способам и устройствам управления тяговым приводом полноприводного колесного транспортного средства высокой проходимости, в частности управления при преодолении препятствий.
Целью изобретения является увеличение курсовой устойчивости транспортного средства и снижение динамической нагруженности привода, уменьшение динамической нагруженности.
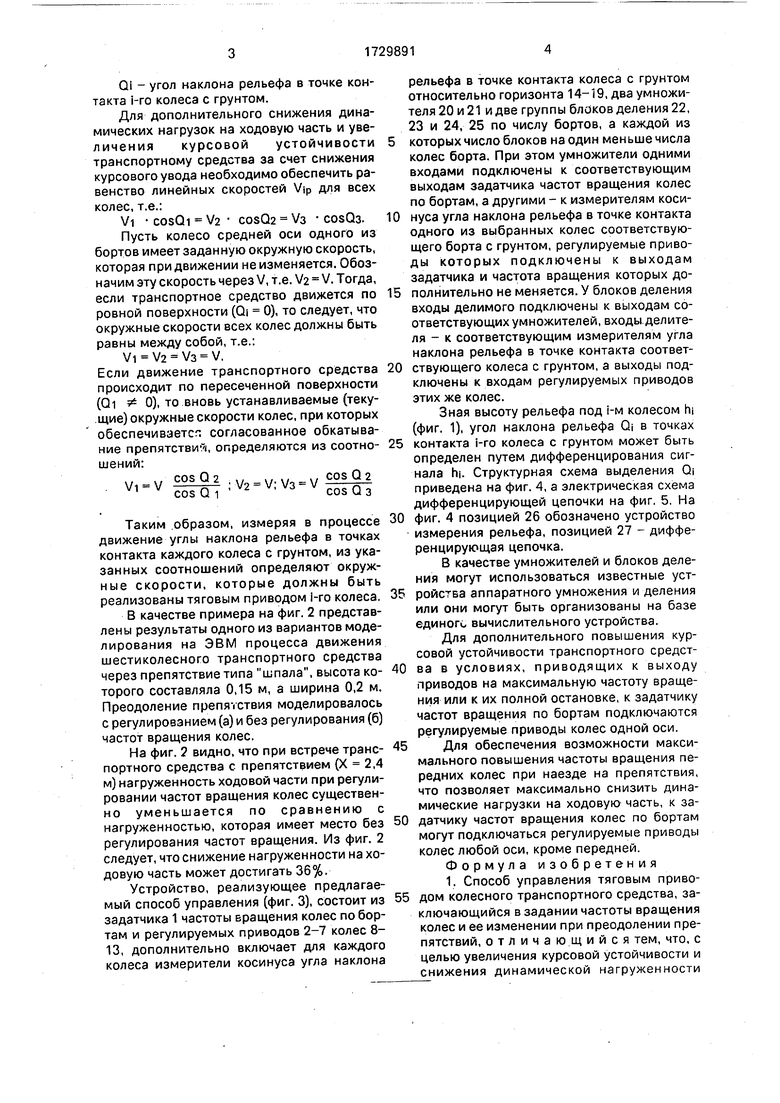
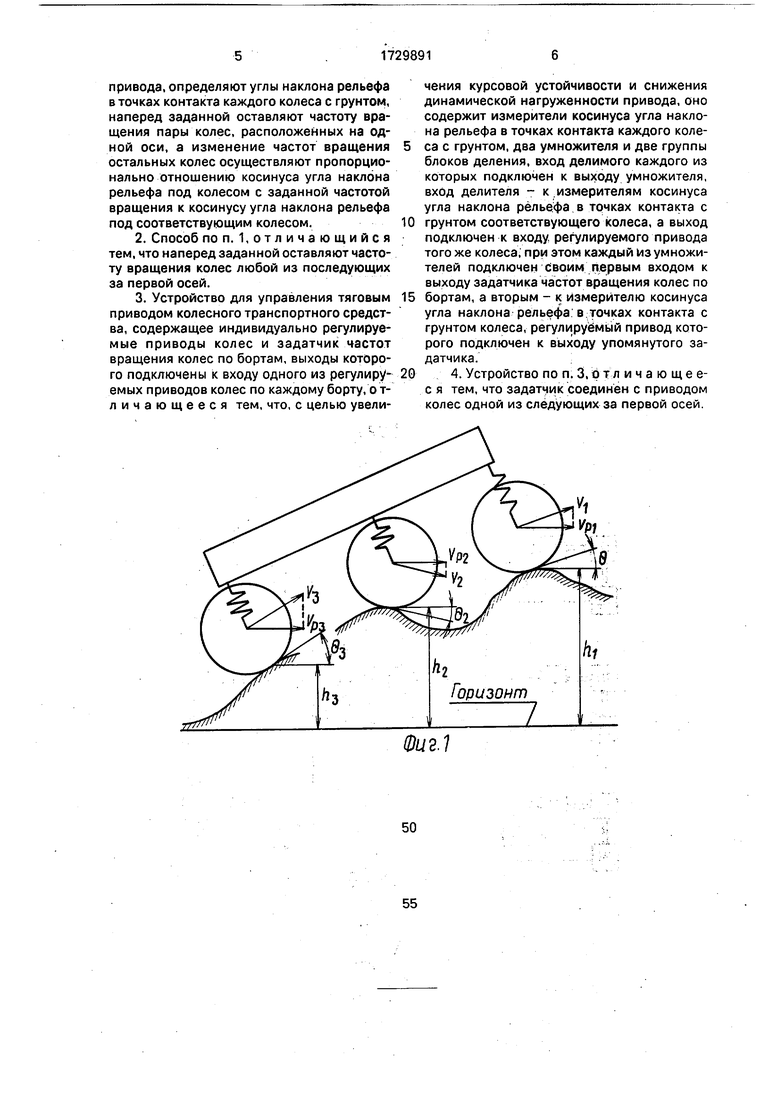
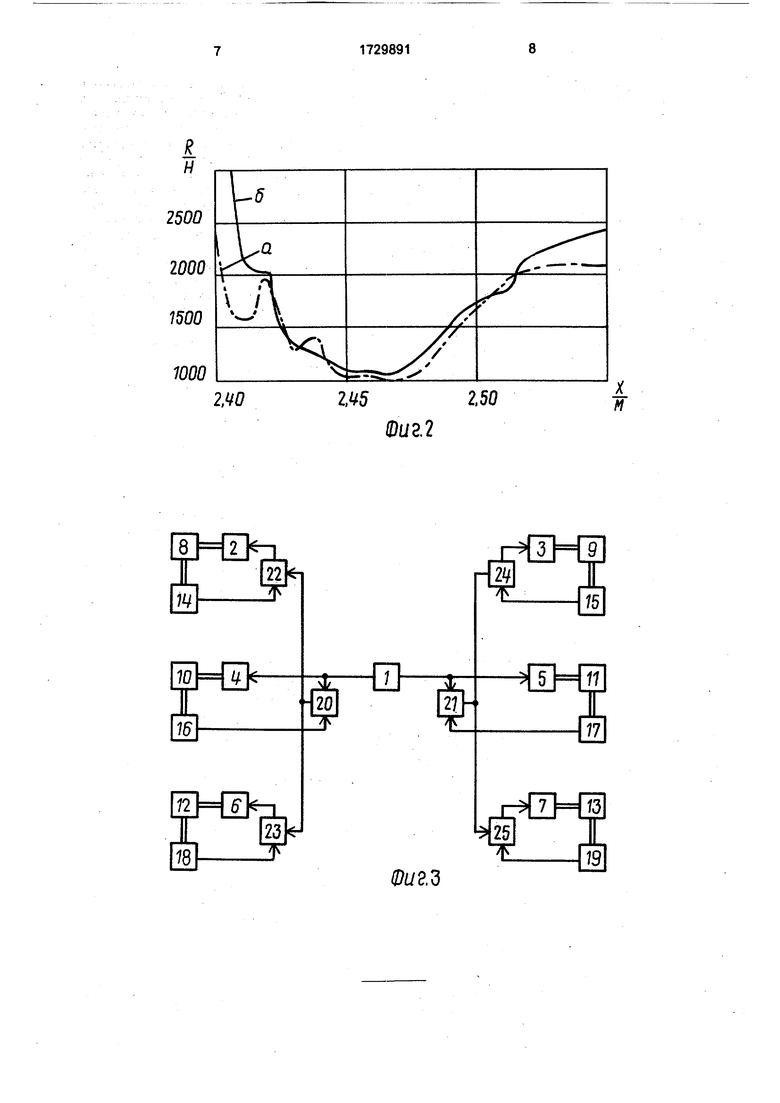
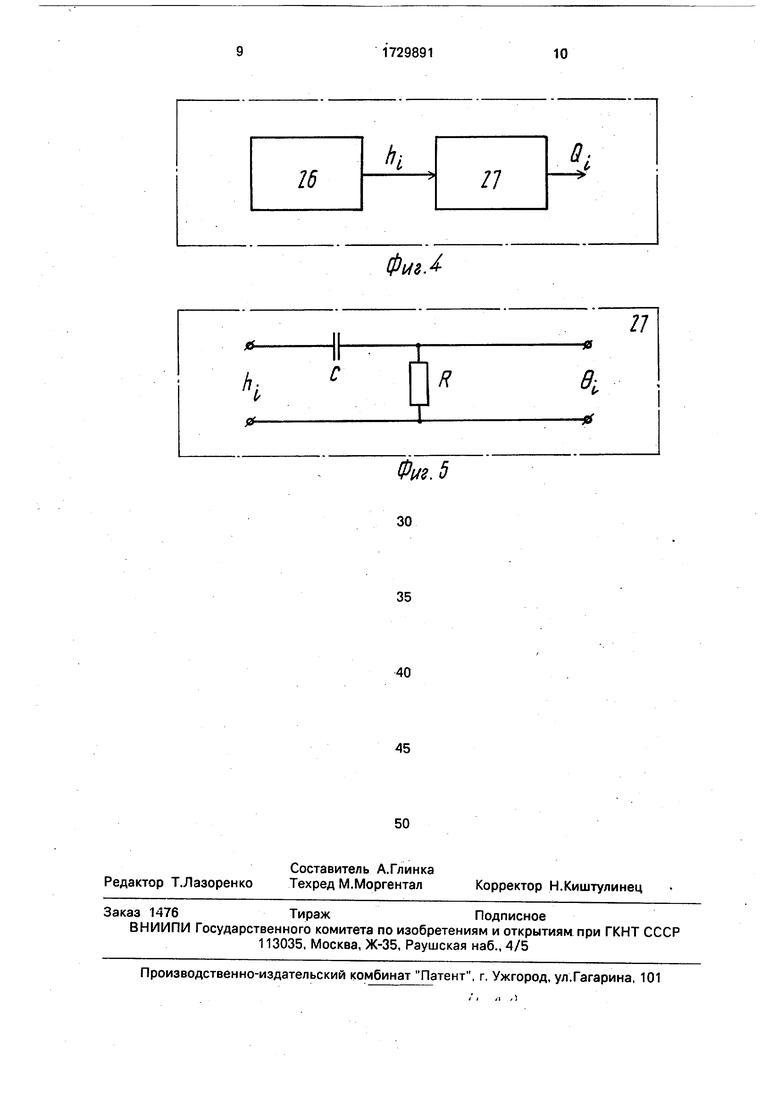
На фиг. 1 приведена схема для определения углов наклона рельефа при обкатывании препятствий в точках контакта колес с грунтом на примере одного борта шестико- лесного транспортного средства; на фиг. 2 - график изменения радиальной реакции на колеса передней оси при движении транспортного средства через препятствие типа шпала с регулированием (а) и без регулирования (б) частоты вращения колес в зависимости от пройденного расстояния X; на фиг. 3 - структурная схема устройства управления тяговым приводом; на фиг. 4 - структурная схема блока определения угла наклона рельефа в точках контакта i-ro колеса с грунтом; на фиг. 5 - электрическая схема дифференцирующей цепочки.
Из геометрических построений (фиг. 1) следует, что проекция линейной скорости i-ro колеса на горизонтальную плоскость определяется зависимостью
Vip Vj cos Qi,
где Vip - проекция линейной скорости i-ro колеса на горизонтальную плоскость;
Vj - окружная скорость Qi-ro колеса;
Qi - угол наклона рельефа в точке контакта i-ro колеса с грунтом.
Для дополнительного снижения динамических нагрузок на ходовую часть и уве- личения курсовой устойчивости транспортному средства за счет снижения курсового увода необходимо обеспечить равенство линейных скоростей ЛР для всех колес, т.е.:
Vi cosCh V2 cosCh VG созОз.
Пусть колесо средней оси одного из бортов имеет заданную окружную скорость, которая при движении не изменяется. Обозначим эту скорость через V, т.е. V2 V. Тогда, если транспортное средство движется по ровной поверхности (Qi 0), то следует, что окружные скорости всех колес должны быть равны между собой, т.е.:
Vi V2 V3 V.
Если движение транспортного средства происходит по пересеченной поверхности (СИ 0), то вновь устанавливаемые (текущие) окружные скорости колес, при которых обеспечивается согласованное обкатывание препятствий, определяются из соотношений:
- V,-V V;V3 VCOSQ2
cos Q 1
cos Оз
Таким образом, измеряя в процессе движение углы наклона рельефа в точках контакта каждого колеса с грунтом, из указанных соотношений определяют окружные скорости, которые должны быть реализованы тяговым приводом i-ro колеса.
В качестве примера на фиг. 2 представлены результаты одного из вариантов моделирования на ЭВМ процесса движения шестиколесного транспортного средства через препятствие типа шпала, высота которого составляла 0,15 м, а ширина 0,2 м. Преодоление препятствия моделировалось с регулированием (а) и без регулирования (б) частот вращения колес.
На фиг. 2 видно, что при встрече транспортного средства с препятствием (X 2,4 м) нагруженность ходовой части при регулировании частот вращения колес существенно уменьшается по сравнению с нагруженностью, которая имеет место без регулирования частот вращения. Из фиг. 2 следует, что снижение нагруженности на ходовую часть может достигать 36%.
Устройство, реализующее предлагаемый способ управления (фиг. 3), состоит из задатчика 1 частоты вращения колес по бортам и регулируемых приводов 2-7 колес 8- 13, дополнительно включает для каждого колеса измерители косинуса угла наклона
рельефа в точке контакта колеса с грунтом относительно горизонта 14-19, два умножителя 20 и 21 и две группы блоков деления 22, 23 и 24, 25 по числу бортов, а каждой из
которых число блоков на один меньше числа колес борта. При этом умножители одними входами подключены к соответствующим выходам задатчика частот вращения колес по бортам, а другими - к измерителям коси0 нуса угла наклона рельефа в точке контакта одного из выбранных колес соответствующего борта с грунтом, регулируемые приводы которых подключены к выходам задатчика и частота вращения которых до5 полнительно не меняется. У блоков деления входы делимого подключены к выходам соответствующих умножителей, входы делителя - к соответствующим измерителям угла наклона рельефа в точке контакта соответ0 ствующего колеса с грунтом, а выходы подключены к входам регулируемых приводов этих же колес.
Зная высоту рельефа под i-м колесом hi (фиг. 1), угол наклона рельефа Qi в точках
5 контакта i-ro колеса с грунтом может быть определен путем дифференцирования сигнала hi. Структурная схема выделения Qi приведена на фиг. 4, а электрическая схема дифференцирующей цепочки на фиг. 5. На
0 фиг. 4 позицией 26 обозначено устройство измерения рельефа, позицией 27 - дифференцирующая цепочка.
В качестве умножителей и блоков деления могут использоваться известные уст5 ройства аппаратного умножения и деления или они могут быть организованы на базе единого вычислительного устройства.
Для дополнительного повышения курсовой устойчивости транспортного средст0 ва в условиях, приводящих к выходу приводов на максимальную частоту вращения или к их полной остановке, к задатчику частот вращения по бортам подключаются регулируемые приводы колес одной оси.
5 Для обеспечения возможности максимального повышения частоты вращения передних колес при наезде на препятствия, что позволяет максимально снизить динамические нагрузки на ходовую часть, к за0 датчику частот вращения колес по бортам могут подключаться регулируемые приводы колес любой оси, кроме передней. Формула изобретения 1. Способ управления тяговым приво5 дом колесного транспортного средства, заключающийся в задании частоты вращения колес и ее изменении при преодолении препятствий, отличающийся тем, что, с целью увеличения курсовой устойчивости и снижения динамической нагруженности
привода, определяют углы наклона рельефа в точках контакта каждого колеса с грунтом, наперед заданной оставляют частоту вращения пары колес, расположенных на одной оси, а изменение частот вращения остальных колес осуществляют пропорционально отношению косинуса угла наклона рельефа под колесом с заданной частотой вращения к косинусу угла наклона рельефа под соответствующим колесом.
2.Способ по п. 1,отличающийся тем, что наперед заданной оставляют частоту вращения колес любой из последующих за первой осей.
3.Устройство для управления тяговым приводом колесного транспортного средства, содержащее индивидуально регулируемые приводы колес и задатчик частот вращения колес по бортам, выходы которого подключены к входу одного из регулируемых приводов колес по каждому борту, отличающееся тем, что, с целью увеличения курсовой устойчивости и снижения динамической нагруженности привода, оно содержит измерители косинуса угла наклона рельефа в точках контакта каждого колеса с грунтом, два умножителя и две группы блоков деления, вход делимого каждого из которых подключен к выходу умножителя, вход делителя - к .измерителям косинуса угла наклона рельефа в точках контакта с
грунтом соответствующего колеса, а выход подключен к входу регулируемого привода того же колеса, при этом каждый из умножителей подключен Своим первым входом к выходу задатчика частот вращения колес по
бортам, а вторым - к измерителю косинуса угла наклона рельефа в.точках контакта с грунтом колеса, регулируемый привод которого подключен к выходу упомянутого задатчика.;
4. Устройство по п. 3, о т л и ч а ю щ е е- ся тем, что задатчик соединен с приводом колес одной из следующих за первой осей.
| название | год | авторы | номер документа |
|---|---|---|---|
| БАЛАНСИРНАЯ ПОДВЕСКА ЧЕТЫРЁХКОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2666080C1 |
| Устройство для автоматического напольного транспортирования груза | 1984 |
|
SU1263556A1 |
| СОЧЛЕНЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1994 |
|
RU2092364C1 |
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ ПРИВОДОМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2548832C2 |
| Устройство для измерения рельефа местности | 1982 |
|
SU1089414A2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ СКОРОСТИ ДРИФТА КОЛЕС АВТОМОБИЛЯ | 2018 |
|
RU2717121C2 |
| Шарнирный узел полноприводного автогрейдера тяжелого типа | 2024 |
|
RU2823972C1 |
| ШИНА ВЕЗДЕХОДА | 2010 |
|
RU2467882C2 |
| Устройство для измерения профиля местности | 1976 |
|
SU661235A1 |
| Способ определения угловой скорости дополнительного рыскания колёс автопоезда | 2023 |
|
RU2812026C1 |
Изобретение относится к транспортным роботам, к способам и устройствам управления тяговым приводом полноприводного колесного транспортного средства высокой проходимости, в частности управление при преодолении препятствий. Цель изобретения - увеличение курсовой устойчивости транспортного средства и снижение динамической нагруженности привода. Сущность способа и работа устройства заключаются в следующем. Определяют углы наклона рельефа в точках наклона каждого колеса с грунтом, выбирают по одному колесу на каждом борту транспортного средства, частоты вращения которых оставляют заданными и при обкатывании препятствий не изменяют, а частоты вращения остальных колес по каждому борту изменяют пропорционально отношению косинусов углов наклона рельефа под выбранным колесом борта и соответствующими остальными колесами того же борта. 2 с. и 2 з.п.ф-лы. 5 ил. со С
Фиг.1
Фм.4
Фиг. 5
| Авторское свидетельство СССР №1249832 | |||
| кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Полноприводное транспортное средство | 1986 |
|
SU1357296A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
