Изобретение относится к подъемно- транспортным машинам, предназначенным, в частности, для строительства крупнопанельных домов.
Цель изобретения - повышение надежности.
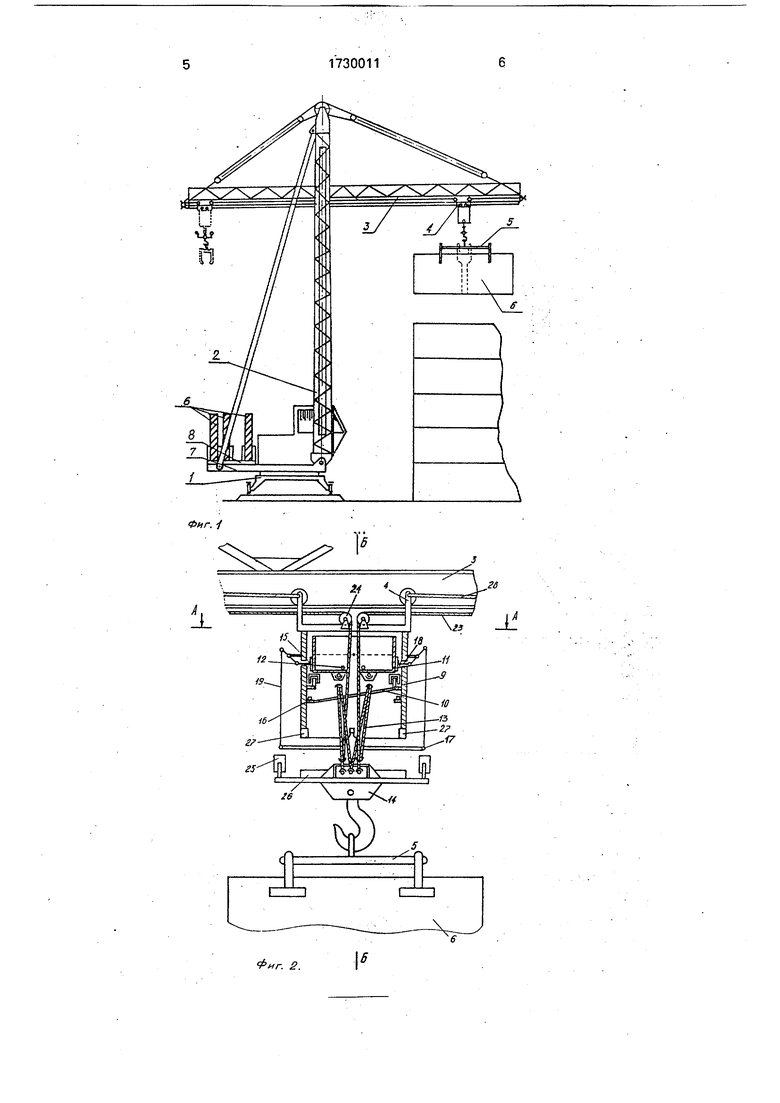
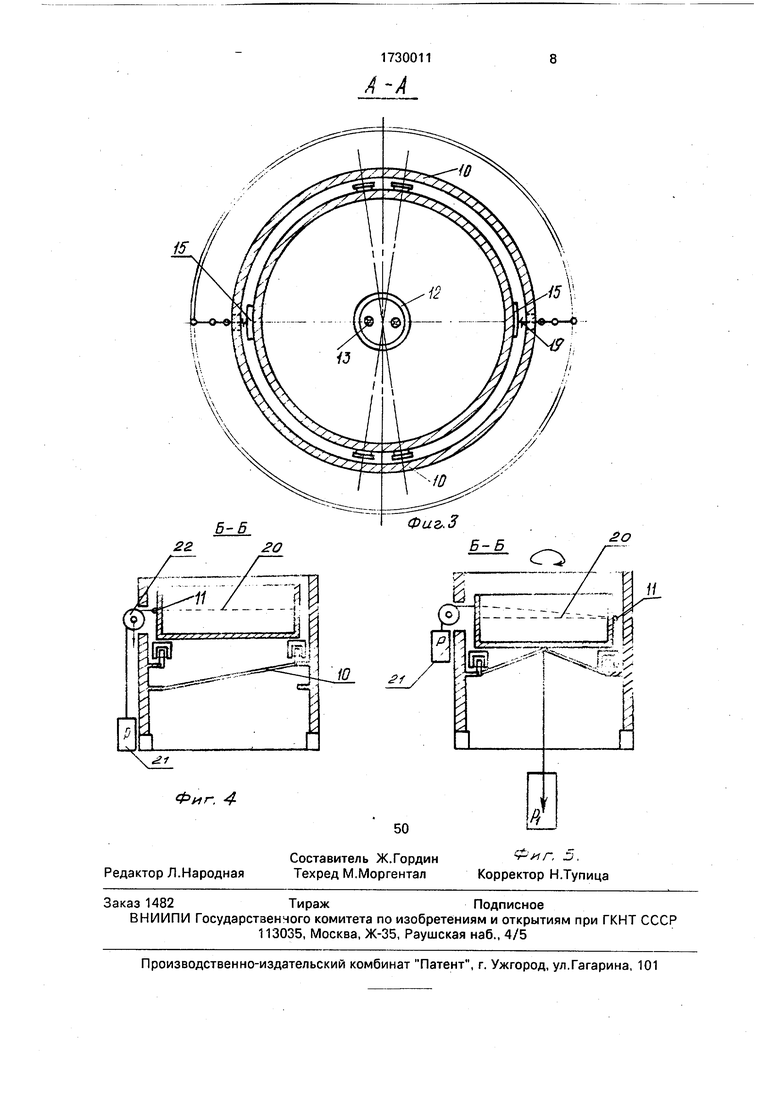
На фиг.1 схематически показан кран, общий вид; на фиг.2 - устройство ориентирования грузов на грузовой тележке, общий вид; на фиг.З - разрез А-А на фиг.2; на фиг.4 - сечение Б-Б на фиг.2, (каретка в верхнем положении); на фиг.5 - то же, каретка в нижнем положении.
Грузоподъемный кран, установленный на ходовой тележке 1, содержит башню 2, стрелу 3 с устройством ориентирования грузов, установленным на грузовой тележке 4,
захватное приспособление 5 для строповки строительного элемента 6, платформу 7 со съемным накопителем 8 для элементов.
Грузоподъемный кран может быть выполнен с установкой съемного накопителя 8 таким образом, что продольные оси строительных элементов 6 располагаются как параллельно плоскости башни 2 (фиг.1), так и перпендикулярно ей.
На грузовой тележке 4 установлено устройство ориентирования грузов, включающее цилиндрический корпус 9, направляющие 10, выполненные в виде двухзаходовых спиралей, на которых размещена цилиндрическая каретка 11 с верхниVJсо
о о
ми блоками 12 для грузового полиспаста 13.
Нижние блоки полиспаста установлены на грузовой подвеске 14. Угол наклона направляющих 10 выполнен большим угла трения качения каретки 11, при этом верхние точки направляющих соответствуют исходному положению каретки (фиг.4), а нижние- ее повороту на 90° (фиг.5).
В цилиндрическом корпусе 9 имеются гнезда, в которых размещены с внутренней стороны подпружиненные тормозные колодки 15, взаимодействующие с цилиндрическим корпусом каретки 11. Направляющие 10, размещенные в цилинд- рическом корпусе 9, по концам имеют упоры 16.
Тормозные колодки 15 связаны с грузом 17 посредством рычагов 18, в средней части шарнирно закрепленных на корпусе 9, и тяг 19, прикрепленных к другим концам рычагов 18.
К цилиндрическому корпусу каретки 11 прикреплен охватывающий ее гибкий орган 20 с противовесом 21 на конце. Гибкий ор- ган 20 проходит через блок 22, установленный на корпусе 9.
На грузовой тележке 4 с помощью грузового каната 23, отводных блоков 24 и грузового полиспаста 13 подвешена грузовая подвеска 14, имеющая упоры 25 и прямолинейные направляющие 26, взаимодействующие соответственно с грузом 17 и ответно выполненными пазами 27 в нижней части корпуса 9. Грузовая тележка 4 снабжена приводным канатом 28.
Устройство работает следующим образом.
На консоль платформы 7 устанавливают привозимый на специальном автотранспор- те съемный накопитель 8 со строительными элементами 6, расположенными в порядке технологической последовательности их монтажа. С помощью грузовой тележки 4, оснащенной захватным приспособлением 5, осуществляют строповку строительного элемента 6 и его подъем с помощью полиспаста 13.
Далее грузовую тележку 4 перемещают вдоль стрелы до места установки строитель- ного элемента 6. В случае, если строительный элемент не требует поворота при его установке в проектное положение, грузовую подвеску 14 опускают до монтажного горизонта.
При необходимости поворота элемента 6 грузовую подвеску 14 поднимают до соприкосновения упоров 25 с грузом 17. При
этом тяги 19, ослабляясь, приводят в движение через рычаги 18 подпружиненные тормозные колодки 15, которые освобождаются от сцепления с цилиндрическим корпусом каретки 11. После этого каретка 11 под действием силы тяжести начинает вращательное движение по наклонным направляющим 10 до соприкосновения с упорами 16. При этом строительный элемент 6 оказывается повернутым на 90° . Устойчивое положение элемента обеспечивается взаимодействием прямолинейных направляющих 26 грузовой подвески 14 с пазами 27, выполненными в нижней части корпуса 9. Это положение достигается путем дальнейшего перемещения грузовой подвески 14 вверх. Затем строительный элемент 6 устанавливают в проектное положение.
После установки элемента 6 (снятие нагрузки) под действием противовеса 21 каретка 11 перемещается вверх в исходное положение (фиг.4). При этом подпружиненные тормозные колодки 15 прижимаются к цилиндрической каретке 11, так как груз 17, освобожденный от нагрузки упорами 25, через рычаг 18 возвращает тормозные колодки 15 до соприкосновения с кареткой 11. Далее процесс монтажа повторяется.
Формула изобретения Устройство для ориентирования грузовой подвески крана, содержащее установленный на грузовой тележке цилиндрический корпус, выполненный с направляющей на внутренней стороне, и каретку с блоками грузового полиспаста, установленную в направляющей, отличающееся тем, что, с целью повышения надежности, оно снабжено тормозными колодками, установленными с возможностью радиального перемещения между корпусом и кареткой, выполненной цилиндрической, рычагами, в средней .части шарнирно закрепленными на корпусе и связанными одними концами с тормозными колодками, тягами, прикрепленными к другим.концам рычагов грузом, расположенным под корпусом и соединенным с нижними концами тяг, упорами и прямолинейной направляющей, установленными на грузовой подвеске соответственно под грузом и корпусом, в нижней части которого ответно прямолинейной направляющей выполнен паз, отклоняющим блоком, установленным на корпусе, противовесом и гибким органом, огибающим отклоняющий блок и связанным концами с кареткой и противовесом.
Фиг. 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи грузов в проемы зданий | 1985 |
|
SU1361105A1 |
| Ограничитель высоты подъема грузовой подвески козлового крана | 1982 |
|
SU1084232A1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| Кран-манипулятор | 1988 |
|
SU1668278A1 |
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ РАСКАЧИВАНИЯ ГРУЗОЗАХВАТНОГО ОРГАНА | 1993 |
|
RU2049038C1 |
| Кран-манипулятор для монтажа зданий из сборного железобетона | 1984 |
|
SU1203011A1 |
| Автоматическая каретка подвесной канатной установки | 1973 |
|
SU495223A1 |
| РАБОЧАЯ ПЛОЩАДКА И СПОСОБ ЕЕ ПОДВЕСКИ | 1991 |
|
RU2020230C1 |
| Кран для гидротехнических затворов | 1988 |
|
SU1602851A1 |
Использование: подъемно-транспортные машины, предназначенные, в частности, для строительства крупнопанельных зданий. Сущность изобретения: устройство снабжено тормозными колодками, установленными с возможностью радиального перемещения между корпусом и кареткой, выполненной цилиндрической. В средней части корпуса шарнирно установлены рычаги, связанные одними концами с тормозными колодками.Другие концы рычагов связаны с тягами, соединенными с грузом, расположенным под корпусом. На грузовой подвеске под грузом и корпусом установлена прямолинейная направляющая и упоры. К цилиндрическому корпусу каретки прикреплен охватывающий ее гибкий орган с противовесом на конце, проходящий через установленный на корпусе блок. Упоры и прямолинейные направляющие взаимодействуют соответственно с грузом и ответно выполненными пазами в нижней части корпуса. 5 ил. сл
| Авторское свидетельство СССР № 1188085, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
