Изобретение относится к подъемно- транспортным средствам, а именно к ) грузопод;ьемным устройствам, предназначенным для маневрирования гидротехническими затворами и для их тpaнcпopт фoвки.
Цель изобретения - снижение энергоемкости. ,
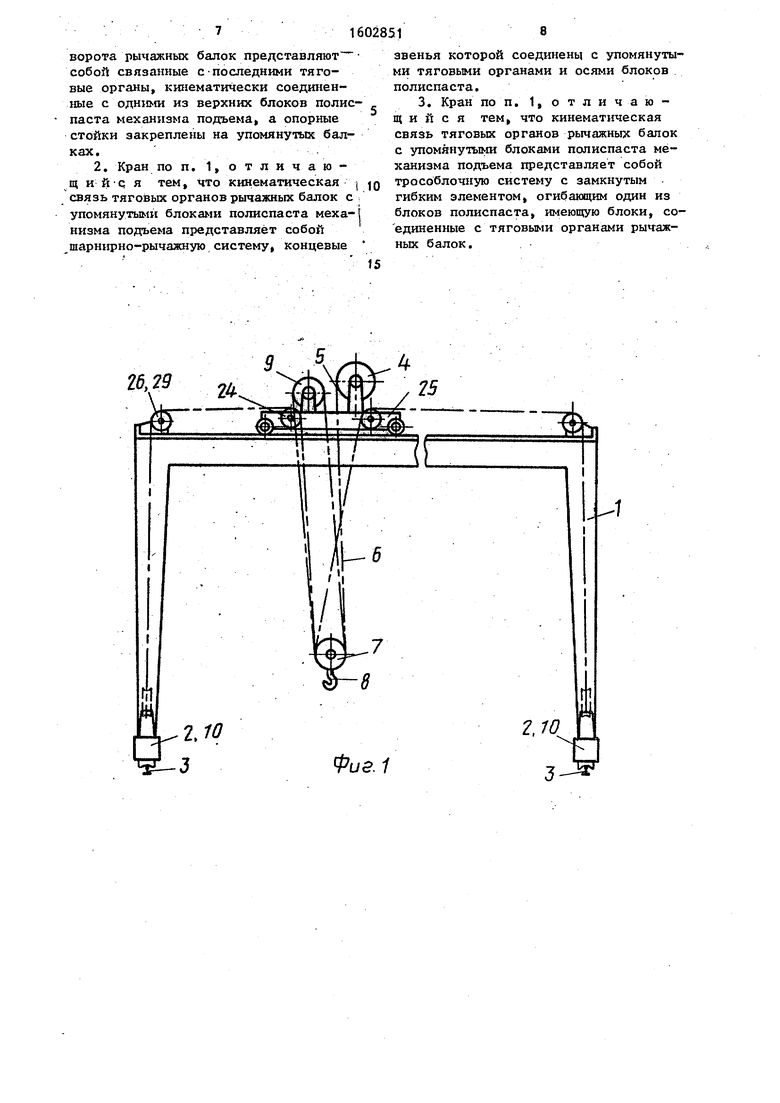
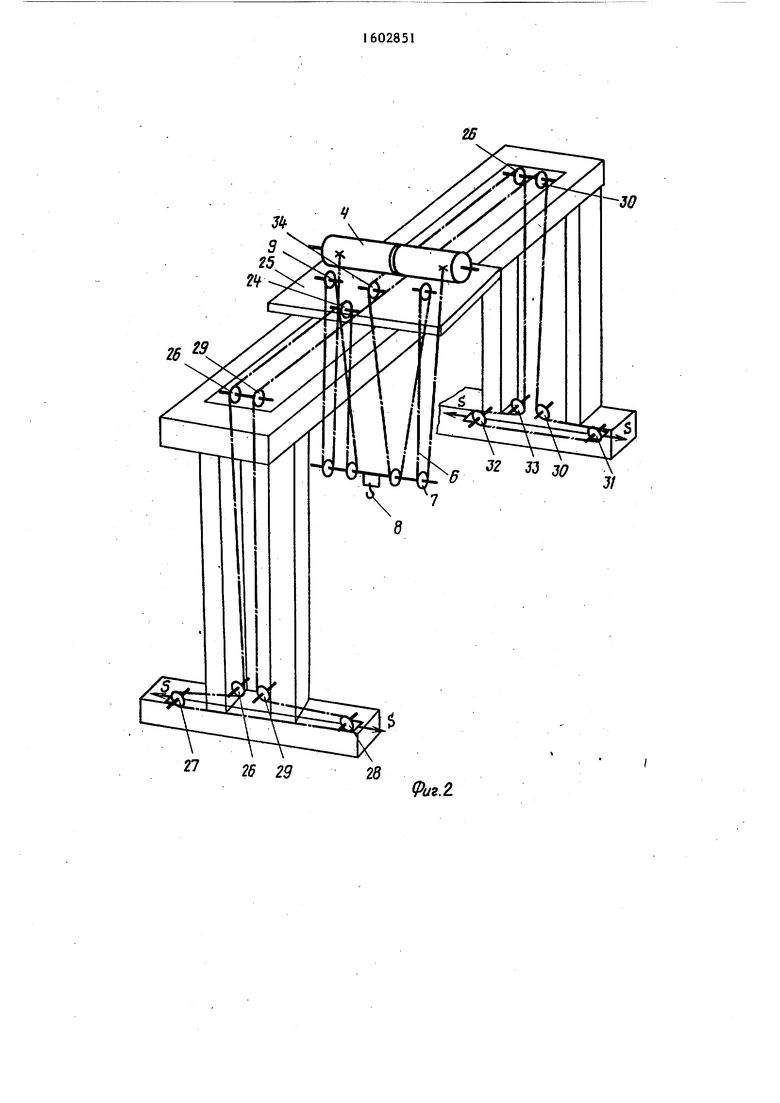
На фиг. 1 показано устройство с кинематической связью в виде тросо- блочной системы, общий вид; наг фиг.2 кинематическая схема устройства, изо термия; на фиг. 3 - кинематическая схема устройства с кинематической связью в виде шарнирно-рычажного механизма, изометрия; на фиг. 4 - колесная ходовая тележка с расчетной схемой.
Кран .содержит несущую конструкцию 1 с ходовыми колесными тележками 2, опирающимися на рельсы 3 рельсового пути и оснащенньми механизмом передвижения (не показан). На несущей конструкции 1 установлен грузовой барабан 4 механизма подъема с приводом (не показан) и гибкой, тягой 5, запасованной в сдвоенный полиспаст 6 через блоки 7 подвести 8 и верхние блоки 9, установленные на несущей конструкц1ш 1. Каждая из ходовых тележек 2 выполнена с рычажной балкой 10, соединенной с несущей конструкцией 1 посредством шарнира 11. Один конец рычажной балки 10 выполнен с опорным элементом 12, размещенным с возможностью взаимодействия с рельсом 3. Несущая констрзп ция 1 (или рычажная балка 10) выполнена с упорами 13, ограничивающими угол поворота рычажных балок 10. По крайней мере один из верхних блоков 9 шарнирно закреплен на коротком плече рычага 14, установленного на несуп1ей конструкции 1 посредством оси 15. Второе
0
5
плечо рычага 14 шарнирно соединено посредством тяги 16 с плечом 17 трех- плечего спаренного рычага 18. Плечи 19 и 20 рычага 18 шарнирно соединены посредством тяговых органов 21 и 22 со вторыми фигурными плечами 23 рычажных балок Ю.
Согласно второму варианту выполнения кинематической связи полиспаста с балками 10 гибкая тяга 5 сдвоенного полиспаста 6 сходит с грузового барабана 4, огибает последовательно блоки 7 и 9 полиспаста. Затем с блока 9 гибкая тяга уходит на отклоняю- 0 Щий блок 24, расположенный на метал- локонстрзгкции тележки 25, огибает отклоняющие блоки 26, расположенные., на стойках портала несущей конструкции 1 и затем огибает блоки 27 и 28, закрепленные на фигурных плечах 23, являющихся в данном случае тяговыми органами, рычажных балок Ю, контактирующих с рельсом- 3, затем огибает отклоняющие блоки 29, расположенные на одном уровне с блоками 26. Затем гибкая тяга 5 уходит на блоки 30, последовательно огибает блоки 31 и 32, закрепленные на фигурных плечах 23 рычажньк балок 10, контактирующих с рельсом 3, блоки 33 и 34, затем последовательно огибает блоки 9 и 7 полиспаста 6 и закрепляется 1на барабане 4. Участки гибкой тяги 5 :между блоками 24, 26 и 30, 34 соосны между собой и перпендикулярны рель-. .сам 3.
5
0
5
0
Таким образом, согласно второму варианту выполнения полиспаст 6 свя- зан с рычажными балками 10 посредством трособлочной системы. Кинемати- - ческая связь полиспаста 6 с рычажными балками 10 может быть выполнена комбинированной из шарнирно-рычажг
ньк механизмов и трособлочной системы..
Подъемно-транспортное устройство работает следующим образом.
При отсутствии нагрузки на подвеске 8 или при нагрузке на подвеске 8, не превьшающей нагрузку or пе - ревозимого груза (затвора) (не показан) , устройство опирается на рельсы 3 посредством колесных ходовых тележек 2. При этом колеснвш ходовые тележки 2, воспринимая через рычажные балки Ю нагрузки от массы несущей конструкции 1, нагружают балки 10 усилиями, обеспечивающими на кон-; це фигурных плеч 23 усшшя, превышающие усилия от нагрузки на подвеске 8, которая передается на плечи 23 балок 10 через шарнирно-рычажную
(1 вариант выполнения) или трособлоч- ную (II вариант) системы. При возрастании нагрузки на подвеске 8 (например, на начальном участке подъема затвора) до расчетной велшшны, превышающей допустимую нагрузку от перевозимого груза, усилие в гибкой тяге 5 возрастает, что пр1гоодит к увели- ченшо усилий, воздействующих непосредственно на плечи 23 рычажных балок 10, до величины, создающей момент, достаточный для поворота рычахшых балок 10 вокруг шарищта 11 до взаимодействия опорных элементов 12 с рельсами 3. В момент разворота рычажных балок 10 подвеска 8 с затвором неподвижна, а разворот рычажных балок 10 происходит за счет навивки гибкой тяги 5 на грузовой барабан f, При этом в устройстве по 1 варианту выполнения конец короткого плеча рычага 1А опускается, а конец длинного плеча рычага 14 поднргмается, разворачивая рычалсные балки 10 (через кинематическую цепь тяга 16 - рычаг 18 - тяговый орган 21 (22)) до упора опорных элементов 12 в рельсы 3. В устройстве по II варианту выполнения навивка гибкой тяги 5 на грузовой барабан 4 цри неподвижно подвеске
8 приводит к уменьшению расстояния между блоками 27 и 28 (32 и 31) и как следствие к развороту рычажньгк балок 10 вокруг шарнира 11 до упора опорных элементов 12 в рельсы 3.
После снгшения нагрузки на подвеске 8 до величины, соотвотств тощей допустимой нагрузки от перевозимого груза. Происходит разворот рычажных
-
028516
балок,1.О в транспортное положение под действием массы несущей конструкции 1. При этом между опорными элементами .12 рычажных балок Ю и рельсами 3 образуется зазор, а рычажные балки 10 приходят во взаимодействие посредством упоров 13 с несущей конструкцией 1. Таким образом устройство вновь опирается на ходовые телезкКй 2.
Работа устройства при восприятии максимальной нагрузки может быть описана следующим уравнением (без учета КПД)
10
15
SH - eN - fN., О,
х.т.
(О
N
где S - усилие, возникающее на конце плеча 23 рычажной балки 10 от нагрузки на подвеске 8; нагрузка на ходовую тележку;
нагрузка на опорный элемент; плечи приложения усилий относительно шарнира 11.
х.т.
NO H,e,f
S
О и. к + (2)
где О
и.к
Q I
масса несущей конструкции 1 с размещенными на ней механизмами; нагрузка на подвеске 8; коэффициент пропорциональности, учитывающий передаточное число кинематичёЬ- кой связи и количество опор.
При отсутствии нагрузки на подвеске или при нагрузке, не превышающей допустимую нагрузку в транспортном полохсении устройства, реакция М заменяется на NO, действующую на рычажную балку 10 со стороны упора 13. Это положение устройства описьшается
(3).
н и я
1. Кран для гидротехнических затворов, содержшдий несуигую конструкцию, связанную с опорными стойками и соед1П1С,нную через ритажные балки с ходовыми тележками, средства пово- рота рыча;кных балок и механизм подъема, включающий в,себя полиспаст-с грузовой подвескор, отличающийся тем, что, с целью снилсе- ния энергоемкости, средства для поворота рычажных балок представляют собой связанные с-последними тяговые органы, кинематически соединен- 1ше с одними из верхних блоков полиспаста механизма подъема а опорные стойки закреплены на упомянутых балках,
2. Кран по п. 1, отличаю- щ и й-q я тем, что кинематическая I связь тяговых органов рычажных балок с : упомянутыми блоками полиспаста меха-t низма подъема представляет собой шарн1фно-рычажную систему, концевые
звенья которой соединены с упомянутыми тяговыми органами и осями блоков полиспаста.
3. Кран по п. 1,отличаю- щ и и с я тем, что кинематическая связь тяговых органов рычажных балок с упомянутыми блоками полиспаста механизма подъема представляет собой трособлочную систему с замкнутым гибким элементом, огибающим один из блоков полиспаста, имеющую блоки, со- единенные с тяговыми органами рычажных балок.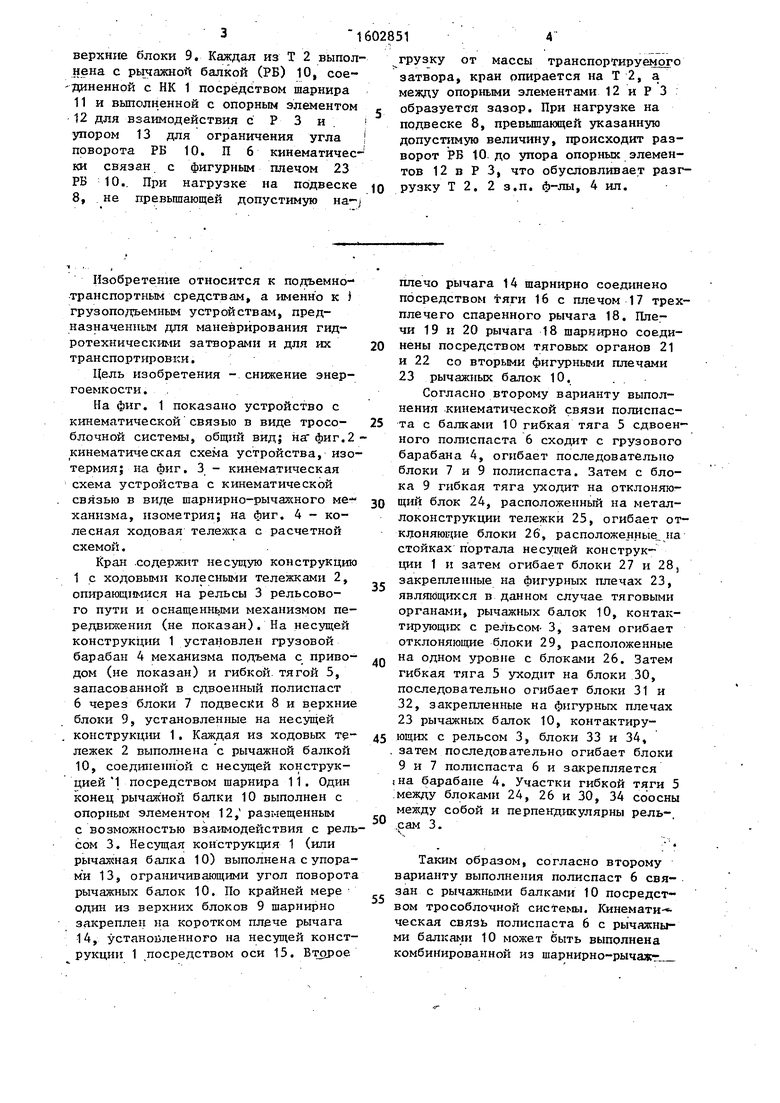

| название | год | авторы | номер документа |
|---|---|---|---|
| Кран для гидротехнических затворов | 1988 |
|
SU1602850A1 |
| Подъемно-транспортное устройство для гидротехнических затворов | 1988 |
|
SU1696373A1 |
| Подъемно-транспортное устройство для гидротехнических затворов | 1988 |
|
SU1749159A1 |
| Подъемно-транспортное устройство для гидротехнических затворов | 1989 |
|
SU1794859A2 |
| Козловой кран для гидротехнического затвора | 1986 |
|
SU1402554A1 |
| Подъемно-транспортное устройство для гидротехнических затворов | 1989 |
|
SU1765100A2 |
| Подъемно-транспортное устройство для гидротехнических затворов | 1989 |
|
SU1765101A1 |
| Козловой кран для гидротехнического затвора | 1986 |
|
SU1428683A2 |
| Подъемно-транспортное устройство для гидротехнических затворов | 1989 |
|
SU1765099A2 |
| Подъемно-транспортное устройство для гидротехнических затворов | 1989 |
|
SU1794857A2 |
Изобретение относится к подъемно-транспортным средствам и предназначено преимущественно для маневрирования гидротехническими затворами и для их транспортировки. Цель изобретения - снижение энергоемкости. Кран содержит несущую конструкцию (НК) 1 с ходовыми тележками (Т) 2, опирающимися на рельсы (Р) 3. На НК 1 установлен стационарно или подвижно грузовой барабан (Б) 4 механизма подъема с приводом и гибкой тягой 5, запасованной в сдвоенный полиспаст (П) 6 через нижние блоки 7 подвески 8 и верхние блоки 9. Каждая из Т 2 выполнена с рычажной балкой (РБ) 10, соединенной с НК 1 посредством шарнира 11 и выполненной с опорным элементом 12 для взаимодействия с Р3 и упором 13 для ограничения угла поворота РБ 10. П 6 кинематически связан с фигурным плечом 23 РБ 10. При нагрузке на подвеске 8, не превышающей допустимую нагрузку от массы транспортируемого затвора, кран опирается на Т 2, а между опорными элементами 12 и Р 3 образуется зазор. При нагрузке на подвеске 8, превышающей указанную допустимую величину, происходит разворот РБ 10 до упора опорных элементов 12 в Р 3, что обусловливает разгрузку Т 2. 2 з.п.ф-лы, 4 ил.
26, 5
J4
25
V
26
19
7 25 29
SO
J/
28
(риг.2.
10
JФигЛ
| Опорная часть крана | 1972 |
|
SU502829A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Мартинсон В.Я | |||
| и др | |||
| Подъемные механизмы гидротехнических сооружений | |||
| И.: Энергия, 1978, с | |||
| Приспособление для останова мюля Dobson аnd Barlow при отработке съема | 1919 |
|
SU108A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
