r.-:5hr fft±z:: u.
-nr- svr- . уу
со ОС со оо Сл
ft±z::
-nr- svr- . уу
Изобретение относится к обработке металлов давлением, в частности к устройствам Д.1Я г ибки деталей типа труб и прутков в нескольких плоскостях.
Цель изобретения - повышение производительности и качества деталей за счет последовательной гибки в двух плоскостях за один установ заготовки.
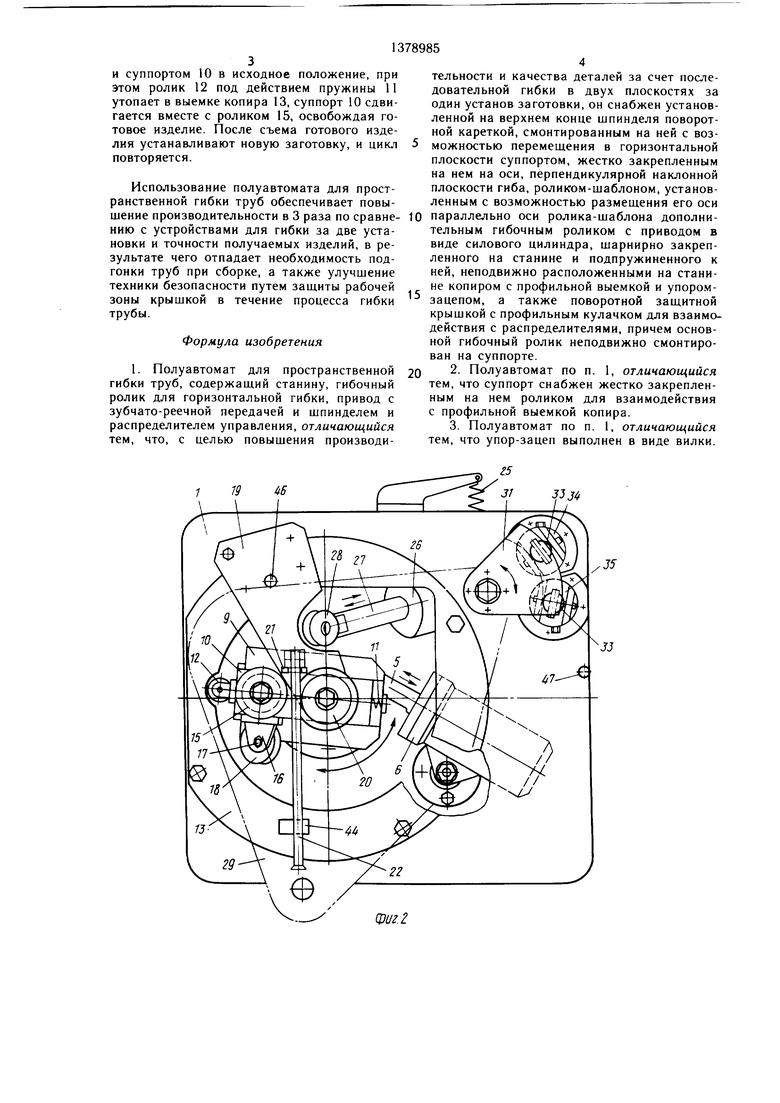
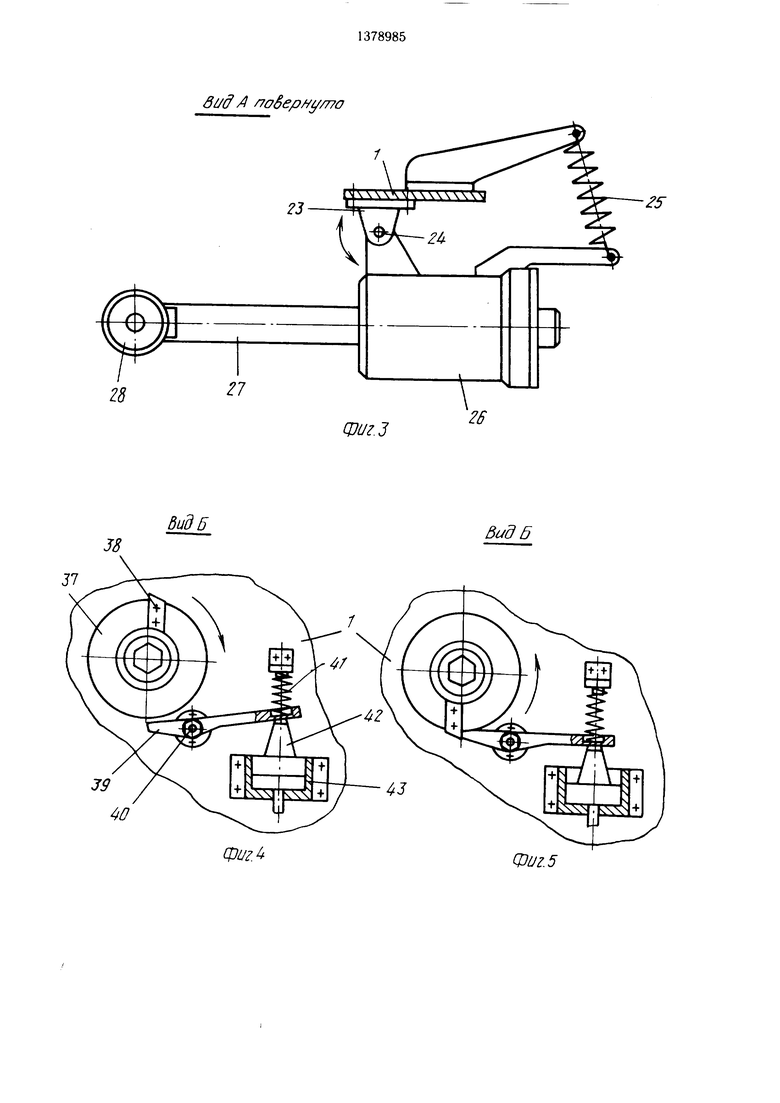
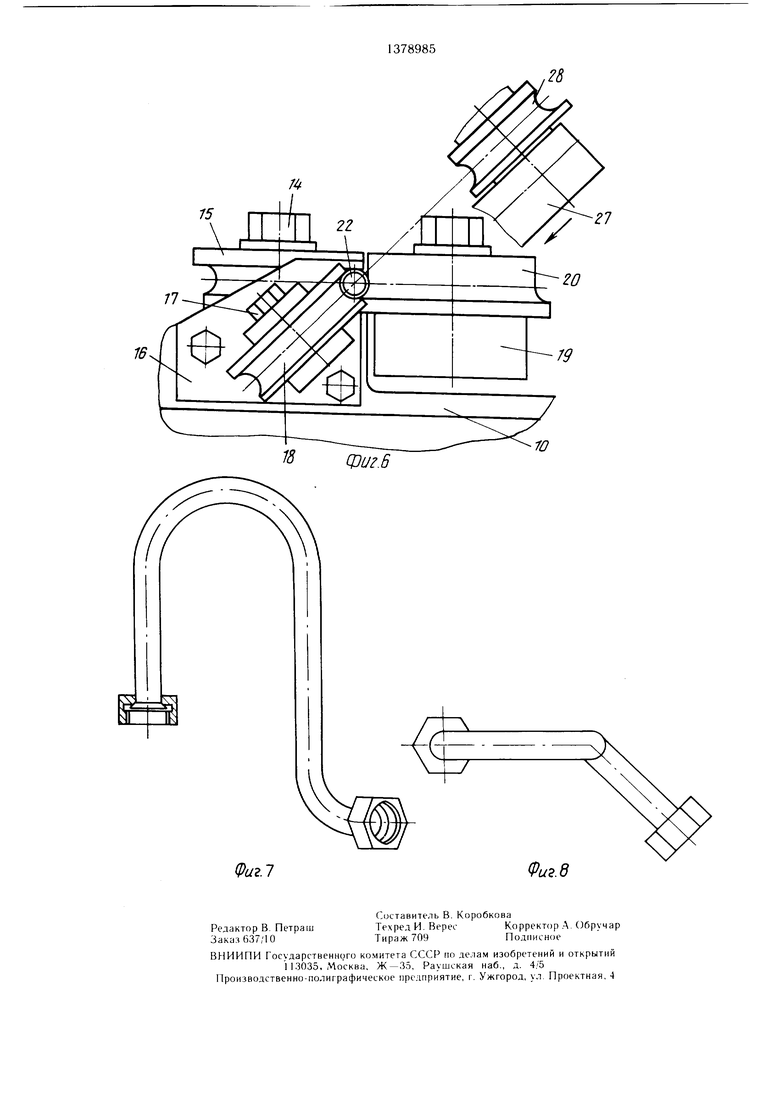
На фиг. 1 представлен полуавтомат, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 вид .Л на фиг. 1; на фиг. 4 и 5 - вид Б на фиг. I, при различных положениях рычага; па фи|-. 6 - положение наклонного ролика-п1аблона в момент начала гибки второго колена; на фиг. 7 изделие, общий вид; на фиг. 8 - то же, вид сверху.
По. 1уавтомат содержит сварную станину 1, жестко закрепленную на ней втулку 2, в которой смонтирован шпиндель 3 с зуб- ч;пым Ko.iecoM 4. выпо;1ненным за одно целое с шпинделем 3 и взаимодействующим со штоком-рейкой 5 привода Н 11еп(.движпо установленного на сланине I посредством кронштейна 7. Верхний торец шпинделя 3 выполнен в виде фланца , на котором жестко закреплена каретка 9 с подвижным суппортом 10, подпружи- не111И)1м пружиной 11. На суппорте 10 неподвижно установлены ролик 12 для взаимодействия с копиром 13, закрепленным также неподвижно на станине 1, ось 14, }ia которой t MOHi и)ояа11 гибочный ролик 15, и кронштейн It), на оси 17 которого в нлоскости наклонного иба расноложен ролик-шаблон 18.
На кронн1тейне 19, жестко закрепленном на станине 1, соосно шпинделю 3 неподвиж- }|о установлен шаблон 20, выполненный в виде ролика, и упор-зацеп 21, выполненный в виде вилки, для установки заготовки 22. IlJapiiH)Ho на станине I с помощью крон- пJтeйнa 23 и оси 24 смонтирован нодпружи- ненный пружиной 25 силовой цилиндр 26, на ппоке 27 которого закреплен донолни- тельный гибочный ролик 28. Крьмцка 29 шар- нирно установлена на вертикальной стойке 30, жестко закрепленной на станине 1, вьшолнена из прозрачного материала и жестко связана с сектором 31, на нижней стороне которого расноложен кулачок 32 для взаимодействия с золотниками 33 распределителей 34 и 35 посредство.м роликов 36, установленных на золотниках 33.
На нижнем конце шпинделя 3 жестко закреплен фиксирующий поворотный диск 37 с упором 38 для взаимодействия с двуплечим рычагом 39, смонтированным с помощью оси 40 на нижпем основании станины 1, при этом одно плечо рычага 39 подпружинено с одной стороны пружиной 41 сжатия, а с другой CTOptjHbi контактирует со птоком 42 привода 43, корпус которого также закреплен на нижнем основании станины 1. На копире 13 жестко установлена опора 44, предназначенная для ориентации нача.мкного положения заготовки 22. Для удобства управления на защитной крыщке 29 предусмотрена рукоятка 45, а для фиксации крайних положений защитной крышки имеются упор 46, закрепленный на кронщтейне 19, и упор 47,
установленный на верхнем основании станины I.
Полуавтомат работает следующим образом.
В исходном положении поршень в цилиндре 26 находится под давлением в крайнем верхнем положении, а дополнительный гибочный ролик 28, закрепленный на штоке 27 цилиндра 26, находится в крайнем выдвинутом положении, двуплечий рычаг 39 отжат давлением, действующим на шток 42
привода 43 (фиг. 4). Заготовку 22 устанавливают одним концом па упоре-зацепе 21, а другим концом на опоре 44, при этом обе гайки сдвинуты к концу трубы у упора-зацепа 21, а сектор 31 с кулачком 32 выведен из
зоны взаимодействия с распределителями 34 и 35 (на фиг. 1 и 2 крышка 29 и сектор 31 показаны в конечном положении гибки). При повороте защитной крышки 29 и сектора 31 по часовой стрелке рукояткой 45 кулачок 32, взаимодействуя с роликом 36 распределителя 34, включает привод 6, щток-рей- ка 5 которого, взаимодействуя с зубчатым колесом 4, поворачивает щпипдель 3 с кареткой 9. Одновременно ролик 12 суппорта 10, взаимодействуя с копиром 13, перемещает суппорт 10 до упора гибочного ролика 15
в шаблон 20. При дальнейшем вращении шнинде;1я 3 ролик 15, обкатываясь, гнет заготовку 22 вокруг наблона 20, причем ролик-шаблон 18 следует за изгибаемой трубой 22 вместе с гибочным роликом 15.
В конце гибки первого колена (горизонтальной гибки) каретка 9 с суппортом 10 и жестко закрепленными на последнем гибочным роликом 15 и роликом-щаблопом 18 останавливаются и фиксируются диском 37 с упором 38, при этом пружина 41 прижимает
рычаг 39 к периферии диска 37 и в конце поворота, соответствующего гибке первого колена, рычаг 39, преодолевая усилие пружины 41, отжимается упором 38 и заскакивает за него (фиг. 5). При дальнейшем повороте защитной крыщки 29 до упора 46 кулачок
32 взаимодействует с распределителем 35, а шток-рейка 5, шпиндель 3, каретка 9 с суппортом 10 остаются на месте. Силовой цилиндр 26 перемещает щток 27 с дополнительным гибочным роликом 28 вниз, и под действием пружины 25 ролик 28 осуществляет гибку второго (наклонного) колена.
Поворотом защитной крышки 29 в исходное положение (против часовой стрелки) до упора 47 последовательно распределитель 35 возвращает щток 27 цилиндра 26 в исходное
(верхнее) положение, включается привод 43 и, преодолевая усилие пружины 41, выводит из зацепления с упором 38 рычаг 39. Привод 6 поворачивает щпиндель 3 с кареткой 9
и суппортом 10 в исходное положение, при этом ролик 12 под действием пружины 11 утопает в выемке копира 13, суппорт 10 сдвигается вместе с роликом 15, освобождая готовое изделие. После съема готового изделия устанавливают новую заготовку, и цикл повторяется.
Использование полуавтомата для пространственной гибки труб обеспечивает повышение производительности в 3 раза по сравне- нию с устройствами для гибки за две установки и точности получаемых изделий, в результате чего отпадает необходимость подгонки труб при сборке, а также улучшение техники безопасности путем защиты рабочей зоны крышкой в течение процесса гибки трубы.
Формула изобретения
I. Полуавтомат для пространственной гибки труб, содержащий станину, гибочный ролик для горизонтальной гибки, привод с зубчато-реечной передачей и шпинделем и распределителем управления, отличающийся тем, что, с целью повышения производительности и качества деталей за счет последовательной гибки в двух плоскостях за один установ заготовки, он снабжен установленной на верхнем конце шпинделя поворотной кареткой, смонтированным на ней с возможностью перемеш,ения в горизонтальной плоскости суппортом, жестко закрепленным на нем на оси, перпендикулярной наклонной плоскости гиба, роликом-шаблоном, установленным с возможностью размещения его оси параллельно оси ролика-шаблона дополнительным гибочным роликом с приводом в виде силового цилиндра, шарнирно закрепленного на станине и подпружиненного к ней, неподвижно расположенными на станине копиром с профильной выемкой и упором- зацепом, а также поворотной защитной крышкой с профильным кулачком для взаимодействия с распределителями, причем основной гибочный ролик неподвижно смонтирован на суппорте.
2.Полуавтомат по п. 1, отличающийся тем, что суппорт снабжен жестко закрепленным на нем роликом для взаимодействия с профильной выемкой копира.
3.Полуавтомат по п. 1, отличающийся тем, что упор-зацеп выполнен в виде вилки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| Роторная линия | 1989 |
|
SU1710302A1 |
| Копировально-фрезерный станок | 1976 |
|
SU650809A1 |
| Автомат для изготовления двухветвевых пружин | 1973 |
|
SU484036A1 |
| Копировально-токарный станок | 1982 |
|
SU1020233A1 |
| Автомат для изготовления пружинных колец | 1982 |
|
SU1063517A1 |
| Установка для изготовления пакетов экономайзеров | 1988 |
|
SU1590298A1 |
| Устройство для гибки труб, преимущественно концов змеевиков | 1986 |
|
SU1428488A1 |
| Автомат для изготовления двух ветвевых пружин с отогнутыми концами | 1989 |
|
SU1657263A1 |
| Трубогибочная машина | 1973 |
|
SU467556A1 |
И;юбретение относится к области оп работки металлов лав.к нием. в часгиопи к устройствам для гибким деталей типа и ирутков в неско.1ькях п. юскостя.х. Цель и.чобретоиияиои1,1111ение производите: ь- гюсти и качества деталей :ia чет последовательности |-ибкИ 11 двух ИЛ01. .ОСТЯ.Х М один чсганов заготовки. Лагот н л уста- нан.пиг.н) (;диим конном ii;i унорс занене .М а ip-.iHM на опоре. linn ново чаниггной крьиики 29 и сектора 31 по часовой спрелке рукояткой 45 кулачок 32, взаимодействуя с роликом 36 распределителя, вклю- чаег привод 6. Шток-рейка привода 6 посредством зубчатого колеса 4 поворачивает ншиндель 3 с кареткой 9. Одновременно ролик 12 суппорта 10, взаимодействуя с копиром 13, перемещает суппорт до упора ги- лочною ро.жка 15 в наб. шн 20. 15, оГ)кат1,:ваясь, гнет заготовку вокруг шаблона 211. В конце гибки первого колена каретка 9 осганавливается н фиксируется диском .7. При дал1)Нейн1ем повороте К)ЫН1- ки 29 до упора 4() кулачок 32 взаимодей- стнуег с раснрсде,. I e.ie.M лБ, 1и1.1индром 2() переметает иггчк 27 с дщи . ши им ьным гибочным )o,iHK( 28 вии1. и 1л).I де1К-11)ием 11) жины нос, 1едни11 144 чич-гнля(.ч riini-v иго1)пго (нак. lll-.H,, 8 и. сл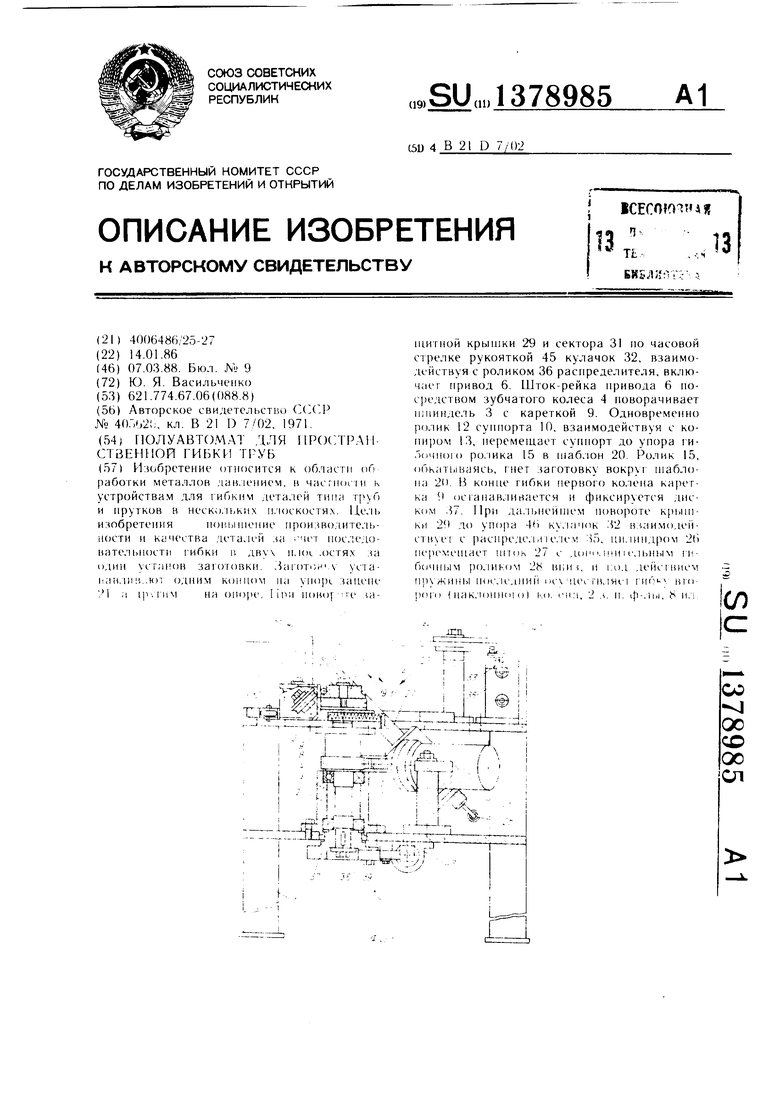
7 W 4S
J/jjj
//
ф1/г.2
3L/ff Г7оВер 1//770
г
27
(иг.З
б ид Б
J9
4ff
фи.и
т
26
дид Б
Фиг. 5
75
76
Фаг.
Фи.в
| Приспособление с иглой для прочистки кухонь типа "Примус" | 1923 |
|
SU40A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
