Изобретение относится к машиностроению, а более конкретно к конструкциям манипуляторов промышленных роботов.
Целью изобретения является повышение надежности работы устройства.
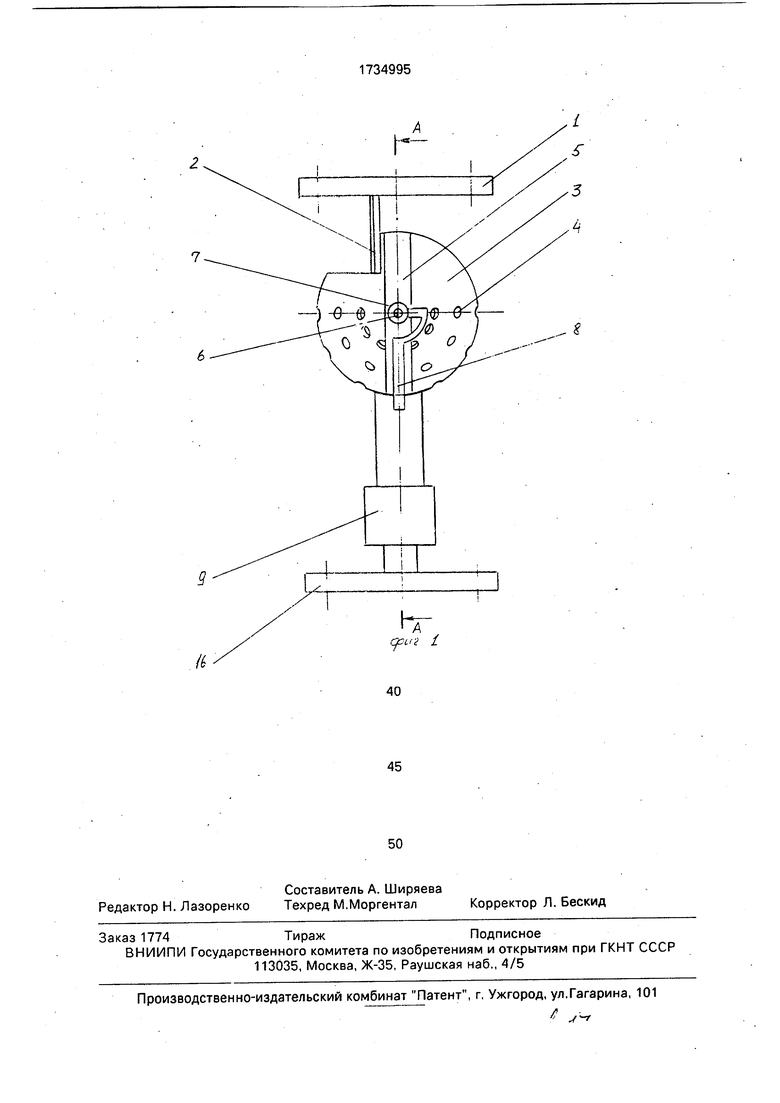
На фиг. 1 показана конструкция шарнира манипулятора; на фиг. 2 - разрез А-А на фиг. 1.
Шарнир манипулятора содержит фланец 1, присоединительные и габаритные размеры которого соответствуют присоединительному фланцу предыдущего звена манипулятора. На фланце 1 закреплен кронштейн 2, на другом конце которого неподвижно закреплена полая сфера 3, по по- верхности которой выполнены отверстия 4. По поверхности сферы перпендикулярно фланцу 1 выполнена выточка, в которой установлено с возможностью перемещения вокруг сферы 3 кольцо 5. На кольце 5 с диаметрально противоположных сторон выполнены оси 6 вращения, на которых с возможностью поворота установлены втулки 7. связанные фигурными рычагами 8 с корпусом 9 механизма перемещения фиксатора, вы- полненного в виде зубчато-реечной передачи, зубчатая рейка 10 с фиксатором 11, который выполнен с возможностью ввода в отверстия 4 сферы 3. В корпусе 9 установлено зубчатое колесо 12 с зацеплением с зуб- чатыми рейками 10 и 13, которое связано с последующим звеном 14, подпружиненным относительно корпуса 9 пружиной 15. Свободный конец последующего звена 14 связан с фланцем 16 крепления схвата. В корпусе 9 выполнены упорные элементы 17, а на подвижном элементе 14 - бурты 18.
Устройство работает следующим образом.
В исходном положении пружина 15 рас- жата до упора буртом 18 последующего звена 14 в упорные элементы 17 корпуса 9. При этом зубчатая рейка 13 последующего звена 14 смещена вниз, а находящаяся в зацеплении с зубчатой рейкой 13 через зубчатое колесо 12 зубчатая рейка 10 смещена вверх, при этом фиксатор 11 введен в отверстие 4 сферы 3. Таким образом звено зафиксировано в определенном рабочем положении. Для изменения конфигурации последующе- го звена робот опускает схват до упора в
неподвижную поверхность и далее до сжатия пружины 15 последующим звеном 14. Одновременно при перемещении зубчатой рейки 13 вверх, зубчатая рейка 10 перемещается вниз, выводя фиксатор 11 из отверстия 4 сферы 3. Перемещением манипулятора промышленного робота в направлении, обеспечивающем требуемый наклон части звена со схватом относительно другой части звена со сферой 3 и фланцем 1, достигается изменение конфигурации шарнира манипулятора. Фиксируется новое положение отводом схвата от неподвижной поверхности и, соответственно, вводом фиксатора 11 в другое, соответствующее новому положению, отверстие 4 сферы 3. При этом пружина 15 отжимает последующее звено 14 до упора буртом 18 в упорные элементы 17, соответственно перемещаются в противоположные стороны зубчатые рейки 13 и 10, с последней из которых связан фиксатор 11. Данная конструкция шарнира манипулятора позволяет осуществлять поворот схвата относительно оси фланца 1 в любом направлении на угол, максимальная величина которого превышает 90°. Формула изобретения Шарнир манипулятора, содержащий предыдущее и последующее звенья, сферу с отверстиями и осями вращения сферы и фиксатор взаимного положения звеньев с механизмом его перемещения, отличающийся тем, что, с целью повышения надежности, он снабжен кольцом, связанным с последующим звеном посредством дополнительно введенных рычагов, а механизм перемещения фиксатора выполнен в виде корпуса, установленного на конце последующего звена и подпружиненного относительно него, и зубчато-реечной передачи, зубчатое колесо которой установлено на корпусе, а зубчатые рейки установлены соответственно на последующем звене и на фиксаторе, при этом фиксатор имеет возможность взаимодействия с отверстиями сферы, а сама сфера жестко свя- зана с предыдущим звеном и на ее поверхности выполнена выточка, в которой установлено кольцо, кроме того, оси вращения сферы смонтированы на диаметрально противоположных концах кольца.
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль ротации | 1988 |
|
SU1537511A1 |
| Манипулятор | 1988 |
|
SU1590370A1 |
| СИСТЕМА РОБОТИЗИРОВАННОЙ СБОРКИ КРУПНОГАБАРИТНЫХ ФЕРМ, В ТОМ ЧИСЛЕ НА ОРБИТЕ ЗЕМЛИ ИЛИ ЛУНЕ | 2021 |
|
RU2790311C2 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО ГИДРОМАНИПУЛЯТОРА | 1998 |
|
RU2157787C2 |
| Зажимное устройство для токарного станка | 1983 |
|
SU1127696A1 |
| Схват | 1982 |
|
SU1057272A1 |
| Схват | 1987 |
|
SU1440707A2 |
| Манипулятор, работающий в герметизированном объеме | 1989 |
|
SU1604609A1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| Кисть руки промышленного робота | 1981 |
|
SU1013256A1 |