Фиъ.1
о
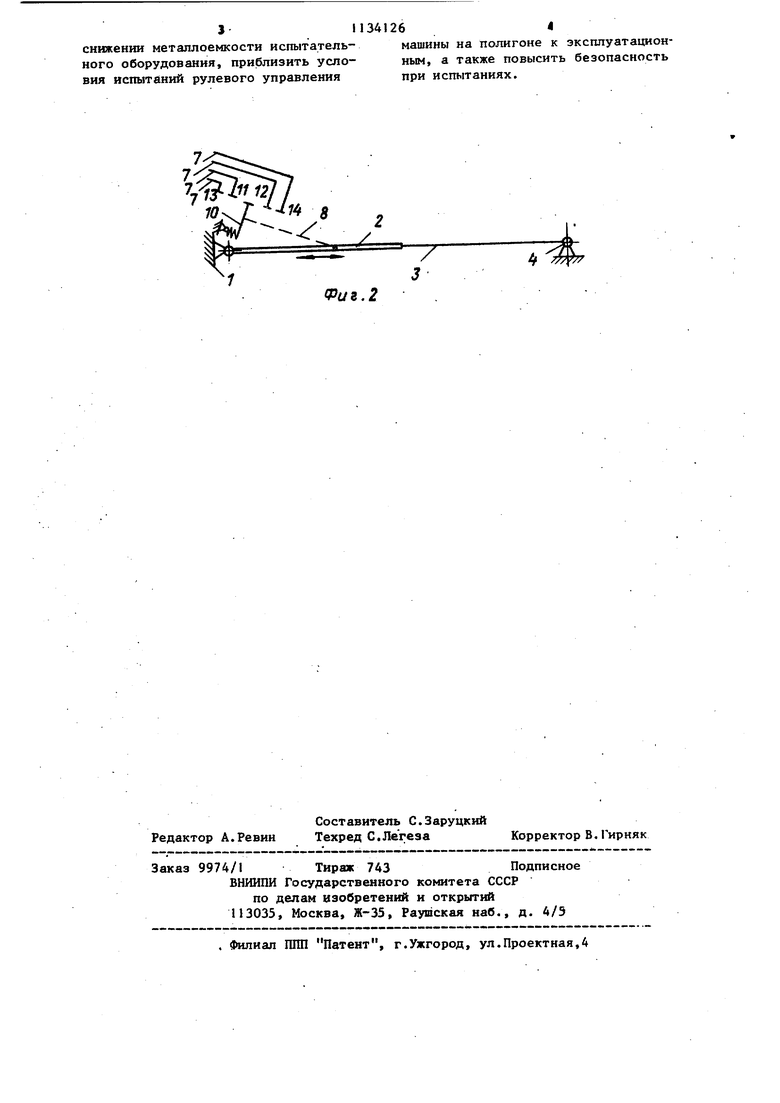
05. I Изобретение относится к сельскохозяйственному и транспортному маши ностроению и может быть использован при полигонных испытаниях объектов автотракторной техники или иных колесных машин. Известно устройство для автоматического вождения трактора по замкнутой траектории, содержащее трос, ода1н конец которого связан с якорной осью, а другой через упругий элемент - с трактором, и исполнительный механизм поворота П . Недостатки известного устройства заключаются в его малой надежности из-за сложности конструкции трособлочной сшстемы и в отсутствии возможности экстренной остановки трактора. Цель изобретения - повышение над ности устройства и расширение его функциональных возможностей Поставленная цель достигается тем, что устройство для автоматич&вкого вояздения трактора по зам тр ктории, содержащее трос, один конец которого связан с якорно осью, а другой через упругий элемен с трактором, и исполнительный механизм поворота, снабжено тросом управ ления, переключателем режима работы и исполчитёльным механизмом экстрен ной остановки трактора, при этом . трос управления связан с упругим зве ном и входом перекшс ателя режима ра боты, выходы которого соединены соответственно с исполнительными меxaнизмa 0I поворота и экстренной оста новки трактора. На фиг.1 представлена структурная ёхема устройства и траектория движения трактора; на фиг.,2 - упругое звено с тросом управления. Трактор 1 посредством упругого звена 2 и троса 3 связан с якорной осью 4, при этом рулевое колесо 5 по оредсЕпвам исполнительного механизма шшорота соединено с выходом переклю чателя 7 режима работы, вход которого через трос 8 управления связан с уяругим звеном 2, а второй вькод с исполнительного механизма 9 экстренной остановки трактора 1 . Переключатель 7 режима работы имеет подпружиненный подвижный контакт 10 и неподвижные контакты 11-14 Контакты II и 12 соединены с входом исполнительного механизма 6 поворо6та, а 13 и 14 - с входом исполнительного механизма 9 экстренной оста новки трактора 1. Устройство работает следующим образом. При движении трактора 1 по траектории к внешней стороне кольцевого трека (его границы АВ), исполнительный механизм 6 поворота вращает рулевое колесо 5 по часовой стрелке. Удаление трактора 1 от якорной оси 4 вызывает растяжение упругого звена 2. При наибольшем допустимом приближении трактора 1 к внешней кромке трека, определяемом соответствующей настройкой переключателя 7 режима работы максимальное рабочее удлинение упругого звена 2 через трос 8 управления изменяет положение подвижного контакта 10 переключателя 7 режима работы, в результате чего последним в контактах 11 или 12 выдается сигнал исполнительному механизму6 поворота на реверсирование вращения рулевого колеса 5. Последующее реверсирование происходит при наибольшем доптстимом приближении трактора 1 к внутренней кромке трека. Параметры программы испытаний трактора с реверсивным вращением рулевого колеса 5 (амппитуда и частота| задаются соответствующей настройкой переключателя 7 режима работы. Выход трактора 1 за пределы сущестг вующей полосы трека (отрезок АВ на фиг.) из-за обрьша упругого звена 2, троса 3 (или по иным причинам) сопровождается определенными признаками предаварийных условий работы и, благодаря механической связи с упругим звеном 2 посредством троса управления 8, подвижный контакт 10 пррек почателя 7 режима работы смещается из рабочей зоны в предаварийную и направляет через контакты 13 или 14 исполнительному механизму 9 сигнал на экстренную остановку трактора 1. Предлагаемое устройство позволяет автоматизировать полигонные испытания трактора и других самоходных машин, обеспечивая при этом программный характер работы механизмов и деталей рулевого з-правления, упростить систему автоматического управления тракторов на полигоне и повысить надежность ее работы при одновременном
31134126t
снижении металлоемкости испытатель- машины на полигоне к эксплуатационного оборудования, приблизить уело- ным, а также повысить безопасность ВИЯ испытаний рулевого управления при испытаниях.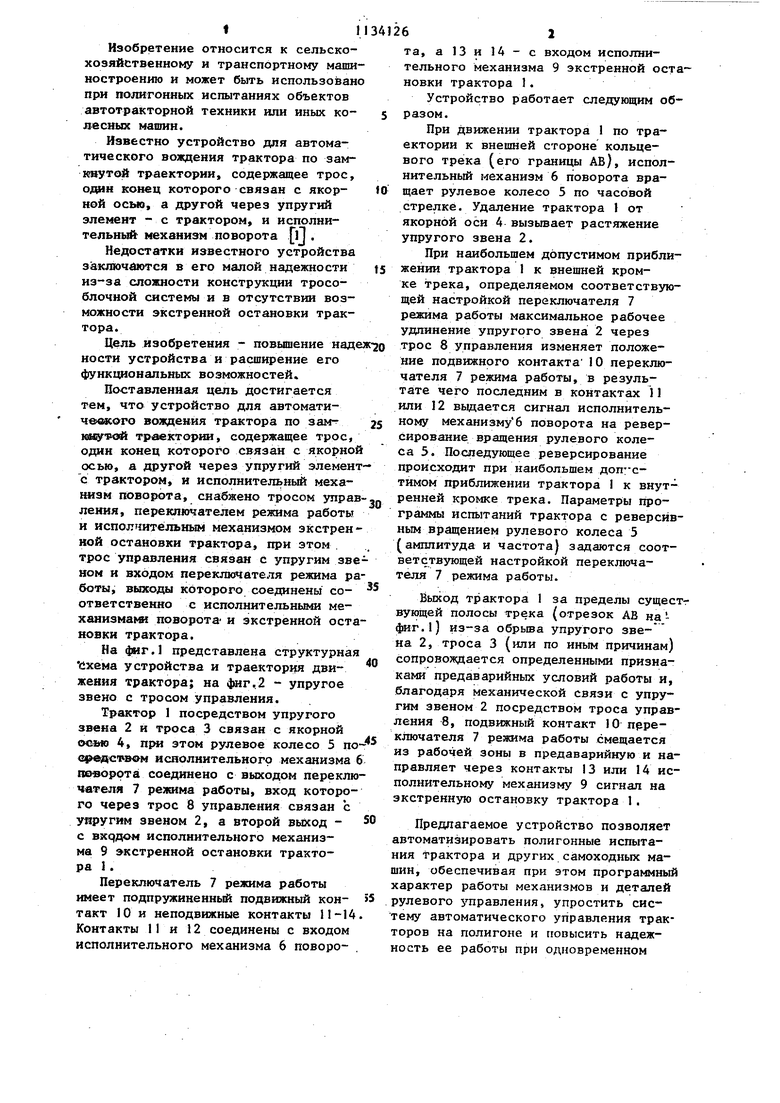
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРА ПРИ ПОЛИГОННЫХ ИСПЫТАНИЯХ | 1971 |
|
SU312558A1 |
| Устройство для автоматического вождения мобильных агрегатов при ускоренных испытаниях на надежность | 1980 |
|
SU940671A1 |
| Устройство для автоматического вождения трактора при испытаниях на полигоне | 1980 |
|
SU934294A1 |
| Устройство для автоматического вождения мобильных объектов на полигоне | 1981 |
|
SU1014491A1 |
| Устройство для автоматического направления движения трактора | 1991 |
|
SU1766291A1 |
| Устройство программного управления,например, полигонными испытаниями машин | 1982 |
|
SU1108424A1 |
| Способ управления мобильным агрегатом и устройство для его осуществления | 1988 |
|
SU1808233A1 |
| Устройство для автоматического вождения машинно-тракторного агрегата | 1980 |
|
SU869595A1 |
| Устройство для автоматического вождения трактора при испытаниях на полигоне | 1976 |
|
SU671767A1 |
| Устройство для автоматического вождения трактора при испытаниях на полигоне | 1982 |
|
SU1059470A2 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРА ПО ЗАМКНУТОЙ ТРАЕКТОРИИ, содержащее трос, один i oнец которого связан с якорной осью, a другой через упругий элемент - с трактором, и исполнительный механизм поворота, отличающееся тем, что, с целью повышения надежности и расширения функциональных возможностей, оно снабжено тросом управления, переключателем режима работы и нсполнительным механизмом экстренной остановки трактора, при этом трос управления связан с упругим звеном и входом переключателя режима работы, выходы которого соеди.нены соответственно с исполнительными механизмами поворота и экстрен ной остановки трактора.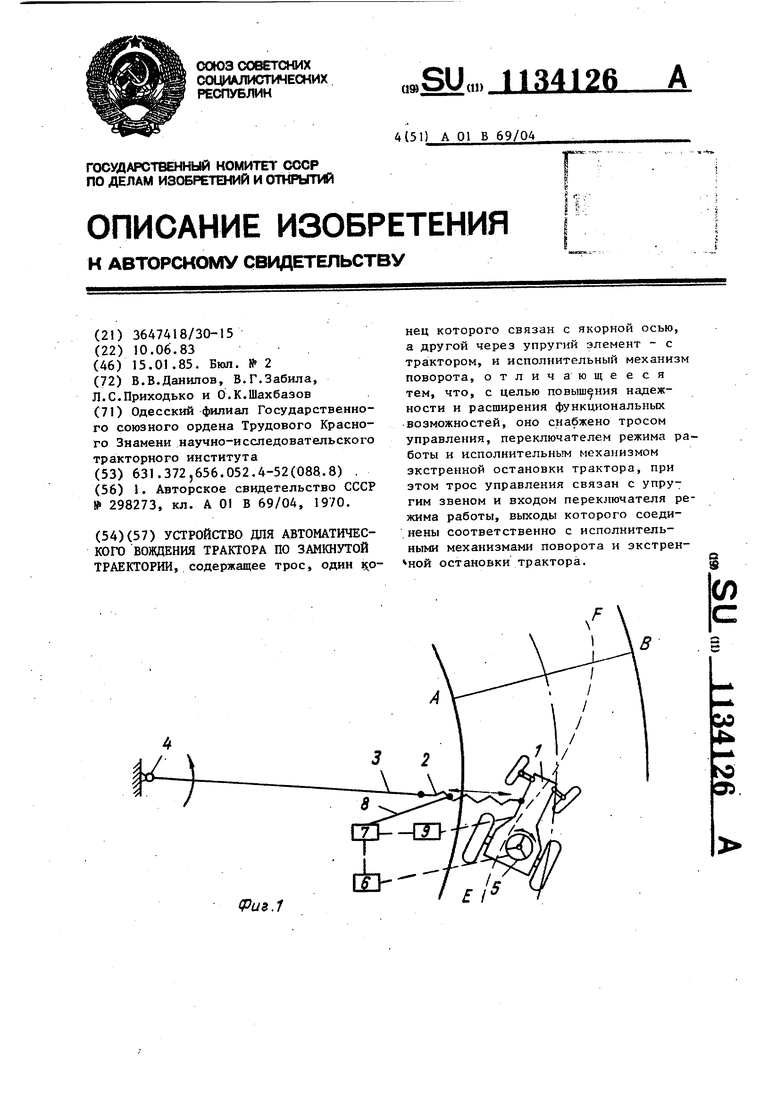
Фиг.2
/
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ ТРАКТОРА ПО ЗАМКНУТОЙ ТРАЕКТОРИИ | 0 |
|
SU298273A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
