Известные обратимые следящие системы для дистанционных манипуляторов имеют в качестве исполнительных элементов двигатели постоянного или переменного тока.
В описываемой следящей системе в качестве исполнительных элемеитов применены индукционные или порощкозые муфты. Это ув-зличивает надежность, снижает мощлюсть управления, уменьшает вес и габариты системы.
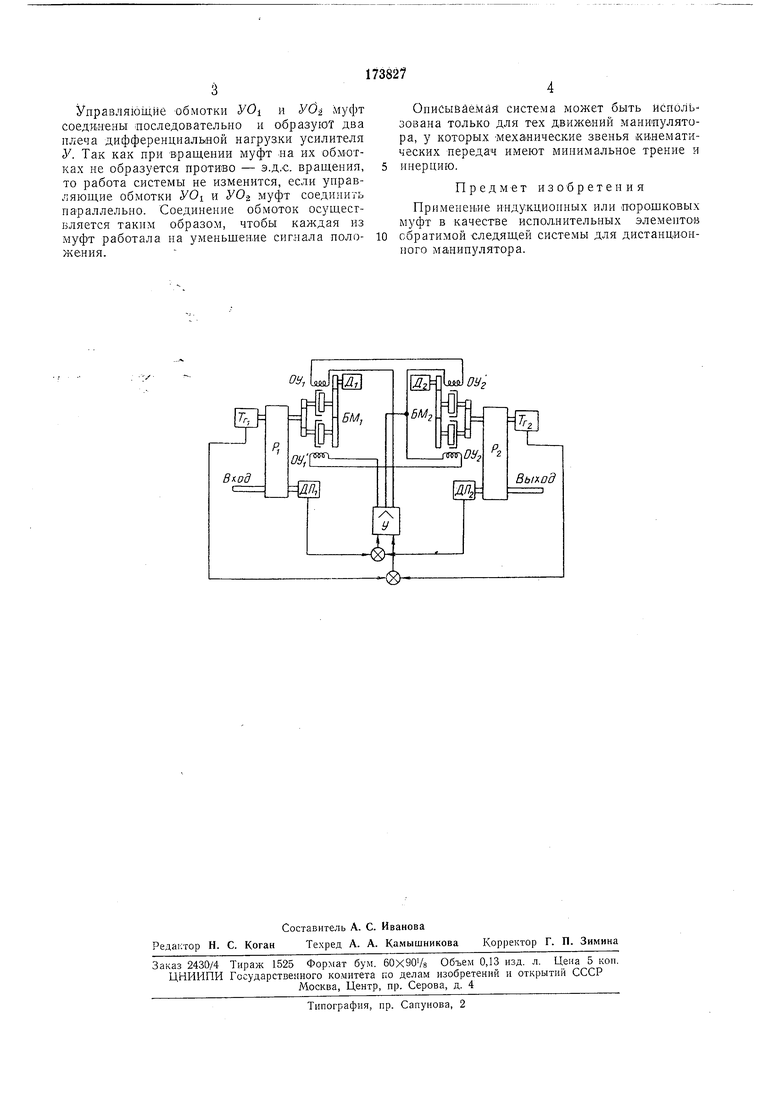
Па чертеже приведена принципиальная схема устройства.
Устройство содержит пр.и-водные электродвигатели ui и Д2 постоянного или переменного тока не регулируемые и не реверсивйыз; блоки 5Mi и БМ-2 иидукционных или норошковых муфт; редукторы Pi и Ро; фазочувствительный усилитель У с выходом по постоянному току, работающий на дифференциальную нагрузку; датчики положе 1ий ДП и ДП.2, в качестве которых могут быть при1менены сельсины, потенциометры, таращающнеся трансформаторы; тахогаператоры Гг, и Т, обмотки и ОУз управления муфт.
,,ексом «1 обозлачепы элементы задающего, а индексом «2 - элементы исполнительного механизмов.
полумуфты блоков БМ , имеющие разные направления вращения. Ведомые полумуфты блоков 5Mi и BMz работают на общую щестерню редуктора, вал которого вращается в ту или иную стороиу, в зависимости от того, с какой из ведущих полумуфт в данный момент времени сцеплены ведомые полумуфты, т. е. в завлсимости от того, по какой из управляющих обмоток ОУ- или ОУ-2 протекает ток управления.
Входной блок BMi муфт вырабатывает момент, противоположный тому, который задает оператор. Исполнительный блок БМ., работает на нагрузку. Эти два блока управляются одним и тем же усиленным оилналом положения и передают равные моменты. Паправление этих моментов таково, что они стремятся уменьщить рассогласование и привести в соответствие «вход и «выход. Система при этом находится в движеиии либо в состоянии статического равновесия сил. Сигнал рассогласования вырабатывается двумя датчиками положений Д/7х и Д/7о.
Для стабилизации системы по скоростям движений задающего и исполнительного механизмов служат сигналы двух тахогенераторОБ 7%, и Т г« поступающие па вход усилителя, причем тахогенератор Тг в.ключен в форсирующем, а тахогенератор Т - в успокаивающем режимах. Управляющие Обмотки УО и УО муфт соединены последовательно и образуют два плеча дпфференциальной нагруаки усилителя У. Так как при вращении муфт иа их обмотках не образуется противо - э.д.с. вращения, то работа системы не изменится, если управляющие обмотки yOi и УО-2 муфт соединить параллельно. Соединение обмоток осуществляется таким образом, чтобы каждая из муфт работала на уменьшение сигнала положения. Описываемая система может быть использована только для тех движений манипулятора, у которых механические звенья кинематических передач имеют минимальное трение и инерпию. Предмет изобретения Применение индукционных или порошковых муфт в качестве исполнительных элементов обратимой следящей системы для дистаннионного манипулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод наведения | 2024 |
|
RU2835471C1 |
| Следящая система | 1979 |
|
SU809042A1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2550379C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА РАЗДЕЛЬНОГО ТИПА | 1966 |
|
SU184577A1 |
| Следящая система | 1977 |
|
SU696407A1 |
| Следящая система | 1976 |
|
SU660018A1 |
| Следящий привод | 1980 |
|
SU954915A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОВОЗОМ | 1968 |
|
SU207966A1 |
| Электропривод для станков | 1951 |
|
SU98785A1 |
| Безредукторный бесконтактный следящий электропривод | 1981 |
|
SU1001412A1 |
