Изобретение относится к тяжелой промышленности и машиностроению, а именно к оборудованию для транспортировки изделий в шаговом режиме при необходимости точной остановки транспортирующего конвейера, например, с прокатанными рулонами.
Целью изобретения является повышение надежности и долговечности путем устранения погрешности в шаге и повышения точности позиционирования транспортируемой продукции,
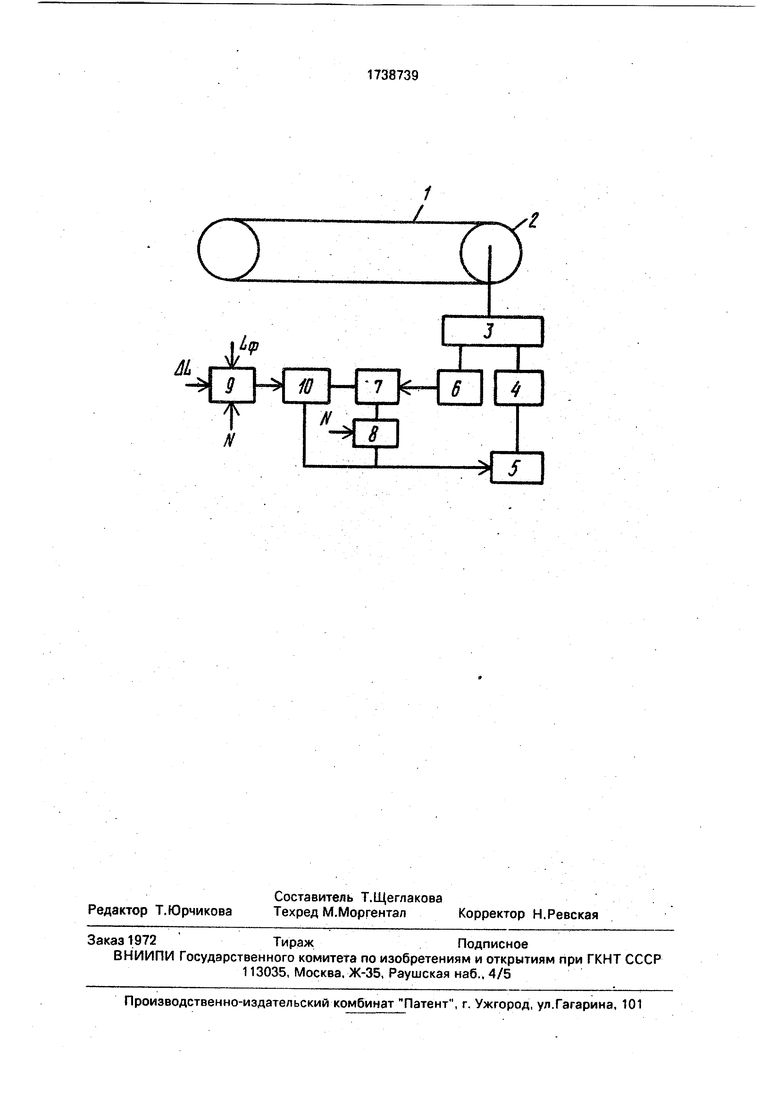
Способ стабилизации шага конвейера поясняется чертежом.
Способ стабилизации шага конвейера осуществляется с помощью устройства, включающего конвейер 1 с ведущей звездочкой 2, редуктор 3, привод 4, блок 5 запуска и управления приводом 4, датчик 6 угла поворота ведущей звездочки 2 дискретного или аналогового типа, в частности сельсин, который соединен с сумматором 7, например, в виде дифференциального сельсина, обеспечивающего алгебраическое суммирование угла поворота ведущей звездочки 2 и требуемой величины коррекции шага конвейера, а также компаратор 8, осуществляющий сравнение выхода, сумматора 7 со значением угла поворота ведущей звездочки 2 за шаг при отсутствии коррекции, блок 9 ввода необходимой коррекции на шаг для
вычисления значения М
AL
Ц
N, представляющий собой множительно-дополнитель- ное устройство, блок 10 запоминания величины коррекции М, представляющий собой, например, сельсин с шаговым двигаXJ
СО 00
ч
О)
ю
телем. Коррекция М подается в этом случае на шаговый двигатель.
Способ стабилизации шага конвейера осуществляется следующим образом.
Включают блок 5 запуска и управления приводом 4 конвейера 1. Через редуктор 3 ведущая звездочка 2 начинает перемещать конвейер. Предварительно на входе компаратора 8 и на первом входе блока 9 ввода необходимой коррекции на шаг выставляется расчетное (проектное) значение N угла поворота ведущей звездочки 2, После перемещения конвейера 1 на один или несколько шагов при коррекции М 0 измеряют фактическую длину ф шага путем линейного измерения. Затем определяют отклонение A L фактической длины шага от номинальной его длины с учетом знака и выставляют A L и L-ф на втором и третьем входах блока 9, в котором определяется отAL
ношение -- и вычисляется требуемая ве-
личина коррекции М по формуле
М
AL
Ц
N,
где Ьф - фактическая длина шага (без коррекции);
A L - отклонение фактической длины шага от номинальной длины шага LH.
Вычисленную величину коррекции М вводят в блок 10, где она запоминается.
Далее вновь запускают конвейер 1 и в процессе его движения величину коррекции М в виде сигнала с блока 10 алгебраически суммируют в сумматоре 7 со значением текущего угла поворота ведущей звездочки 2, т.е. с сигналом с датчика 6, фиксирующего значение угла поворота ведущей звездочки
2 в процессе движения конвейера. Как только эта сумма становится равной N - расчетному значению угла поворота ведущей звездочки 2, срабатывает компаратор 8, который подает команду на блок 5 запуска и управления приводом 4, после чего конвейер 1 отклоняется и останавливается с выбегом. Одновременно с началом торможения конвейера вводится коррекция на следующий шаг в блок 10.
Формула изобретения Способ стабилизации juara конвейера, включающий измерение угла поворота
ведущей звездочки с последующим сравнением полученных данных, учетом номинального значения шага и вычислением величины коррекции для ведущей звездочки, осуществление коррекции путем подачи
сигнала на двигатель с последующей его остановкой и подготовку к осуществлению последующего шага конвейера, отличающийся тем, что, с целью повышения надежности и долговечности работы конвейера путем устранения погрешностей в шаге и повышения точности позиционирования транспортируемой продукции, дополнительно производят измерение фактического шага и путем сравнения его с
номинальным значением шага вычисляют величину отклонения между ними, при этом угол поворота ведущей звездочки измеряют для каждого фактического шага конвейера, а величину коррекции для ведущей звездочки вычисляют с учетом величины отклонения фактического шага конвейера от его номинального значения, запоминают ее и алгебраически суммируют с мгновенными значениями угла поворота ведущей звездочки при последующем шаге конвейера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шаговым режимом работы конвейера | 1981 |
|
SU956382A1 |
| Устройство для управления шаговым режимом работы конвейера | 1988 |
|
SU1747359A1 |
| Устройство для управления тяжелонагруженным цепным конвейером | 1979 |
|
SU872401A1 |
| Способ весового непрерывногодОзиРОВАНия СыпучиХ МАТЕРиАлОВ | 1979 |
|
SU815516A1 |
| Способ управления процессом измельчения | 1986 |
|
SU1440537A1 |
| Способ экспандирования труб | 2019 |
|
RU2763079C2 |
| Способ производства сварных прямошовных труб большого диаметра для магистральных трубопроводов | 2017 |
|
RU2660464C1 |
| Прокатный стан | 1986 |
|
SU1349810A1 |
| Способ распределения реактивных нагрузок между генераторами электростанции | 1987 |
|
SU1539894A1 |
| СПОСОБ УПРАВЛЕНИЯ ШАГОВЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2092964C1 |
Изобретение относится к тяжелой промети и машиностроению и предназначено для транспортировки изделий в шаговом режиме. Цель изобретения - повышение надежности и долговечности работы конвейера (К) путем устранения погрешностей в шаге и повышения точности позиционирования транспортируемой продукции. Для этого дополнительно измеряют значения фактического шага К, сравнивают его с номинальным значением и вычисляют величину отклонения между ними. Для каждого фактического шага К измеряют угол поворота ведущей звездочки и вычисляют величину коррекции для ведущей звездочки с учетом величины отклонения фактического шага Кот его номинального значения. Запоминают вычисленную величину коррекции и алгебраически суммируют ее с мгновенными значениями угла поворота ведущей звездочки при последующем шаге К При равенстве этой суммы расчетному значению угла поворота ведущей звездочки подается сигнал на двигатель, который останавливает К. Одновременно с началом торможения К вводится коррекция наследующий шаг К 1 ил. сл с
| Устройство для управления шаговым режимом работы конвейера | 1981 |
|
SU956382A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
