I
Изобретение относится К .поаъемнотранапортному оборудованию и касается конструкции Грузозахватных лрпопособлеиий для подъема и транапотировки штучных или юакетных грузов подъемны.м механизмом.
Известно захватное устройство, содержащее раму с натравляющими для кареток, несущих зах1ватные элементы, Механиз:М перемещения -кареток, включающий тяги, соединенные с -подвижной .колодкой и V-образными рычагалт .
Однако известная конструкция .позволяет (поднимать груз только Определенной длины.
Целью изобретения является увеличение рабочего хода кареток для захвата грузов переменной длины.
Цель достигается тем, что механизм перемещения :Сна бжен дополнительными рычагами, однил концов сочлененными с Vобразными рычагами с помощью шестерен, смонтированных на осях ,в подвижных кронштейнах, а другим Соединенными с каретасой.
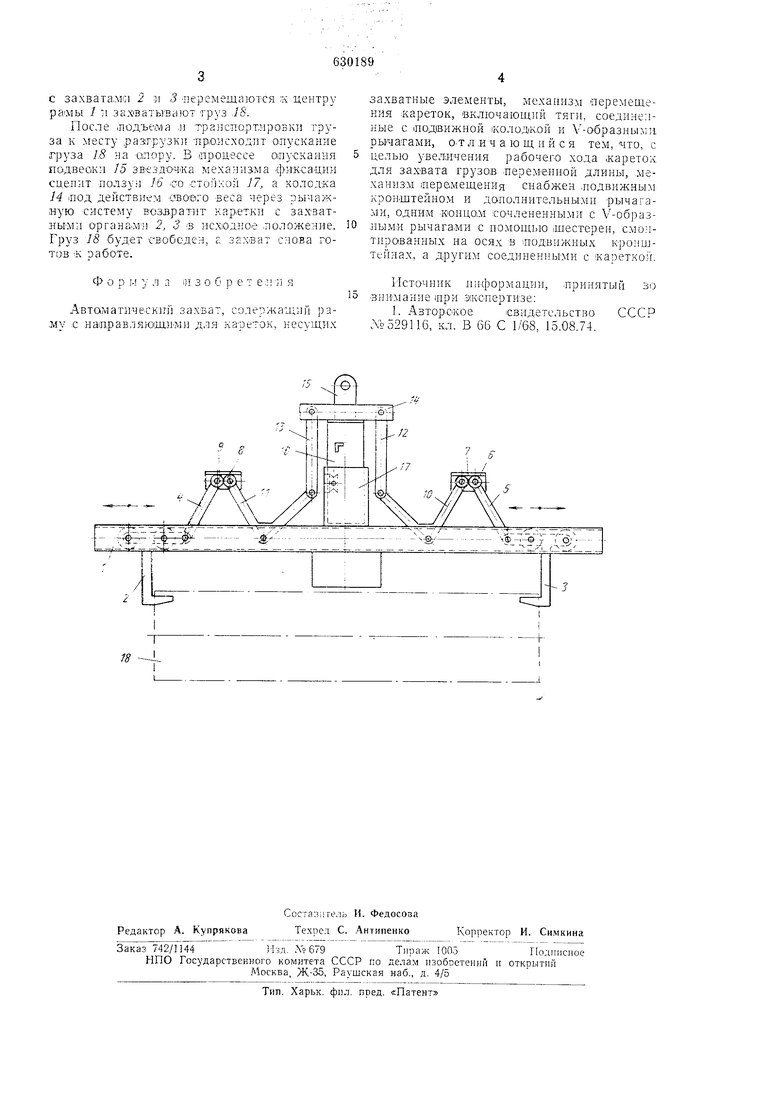
На Чертеже схематически изображен автоматический захват, о.бщлй ВИд.
Автоматический захват содержит раму 1 с направляющими для подвижных кареток, несущих захватные органы 2 и 5 и
;оедине;-;кых с
нижними концами
шарнирно „ рычагоз 4 верхн.Не концы которых чепередачу 6, смонт}1рованную рез зубчатую 7, и передачу 8, установленQ кронштейне ную-3 кронштейне 9, связаны с рычагами 10 и //, соедпненлЬМи с тягами .12 .и 13 подвижной .по зерти-кили колодкой 14. свободно смонтирозанной на подвеске 15 лолзуна J6 механизма фиксации. Ползун 16 проходит через стойку /7, в ь:оторой установлена поворотна;я звездочка механизма ф;1ксаЦ 1и. На чертеже показано рабочее .положение всех .--еталей захвата в MOMeiT подъеV.3. груза.
В ИСХОДНОМ -положении ;ползун 16 находится .:5:;изу стойки 17. Колодка 14 с тяга:ми 12 и /о также находится внизу, а :карет:Kii с захзатньв:и ОрганаМ.и 2 и 3 разведены 3 стороны и находятся в .крайних положениях :по на1п;;:-.-зляющ1 г. рамы /. При олускаHHii захвата ПОСле его посадки иа грхз /5 рама / останавливается, а подвеска 14 с ползуном 16 сове;шае7 некоторый ход вниз .., повопачИзает ззездочку механ 1зма фиксации так, что ока ко препятствует перемещению :ззерм г:;1,-:зуаа 16. Б подьема ПОДЗС. /5 .ползун /- идег яверх и захвагызает колодку 4, которая, подн;{маясь, через тяги 2 /-i :п;;ворачи3ает рычаги 10
и 11 дзухзвеннкков. В результате каретки
-3 Перемещаются
с захватали; 2 л
центоу
рамы / 1 захватывают груз 18.
После лодъема л тра)5С110,рт,мрОБКП груза к месту .разгрузк) пр-оисходпт олускание груза 18 на «пору. В проЦвСсе опускания подвеокп /5 звездочла механизма фик-саци}
а колодка
сцепит ПОЛЗУН
14 аюд действием Овоего -веса через эычажную с 1стему возвратит KapieTKii с захват1-гьгми органа м и 2, 3 ъ исходное .положение. Груз 18 будет свободен, г; захват снова гоТ1 в К оаботе.
Автоматически захват, солержащ; й раму с на1Дравляю 1ЦИМи для кареток, 1есу1дих
захват 1ы-е элементы, механизм оеремешения ;кареток, включающий тяги, соединенные с 1НОД1ВИЖНОЙ колодкой и V-oбpaзны ; i рычагами, о-т л ,и ч а ю щ и и с я тем, что, с увеличения рабочего хода .кареток для захвата грузов лереметюй длины, механиЗМ леремещения снабжен подвижным кронщтейном и дополнительными рычагами, одним .К10нцО;М сочлененными с V-образБыми рычагами с иомощь о шестерен, CMO;Iт 1раванных на осях в лодвижных Kpoiiujтейнах, а другим соединен ы-ми с кареткой.
Источник информации, лринятый BTJ днИМание лри зкслертизе:
1. Авторское свидетельство СССР лЬ 529116, кл. В 66 С 1/68, 15.08.74.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| Грузозахватное устройство | 1985 |
|
SU1237608A1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| Захват-раскладчик | 1980 |
|
SU948835A1 |
| Механизм для фиксации рабочих органов захватного устройства | 1983 |
|
SU1191414A1 |
| Грузозахватное устройство | 1990 |
|
SU1740297A1 |
| Грузозахватное устройство | 1990 |
|
SU1773255A3 |
| Консольный кран | 1979 |
|
SU929534A1 |
| Грузозахватное устройство | 1973 |
|
SU695945A1 |
| Захватное устройство для длинномерных грузов | 1977 |
|
SU715426A1 |
