Изобретение относится к антиблокировочным тормозным системам для автомобилей.
Цель изобретения - повышение курсовой устойчивости и сокращения тормозного пути.
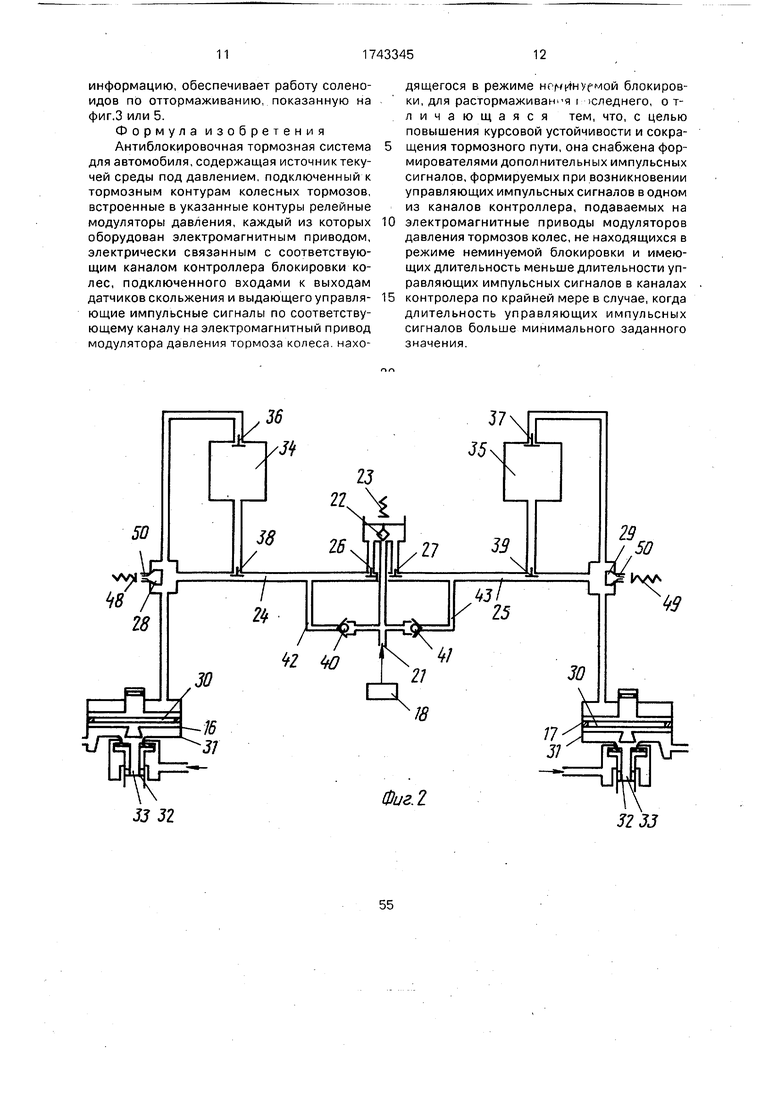
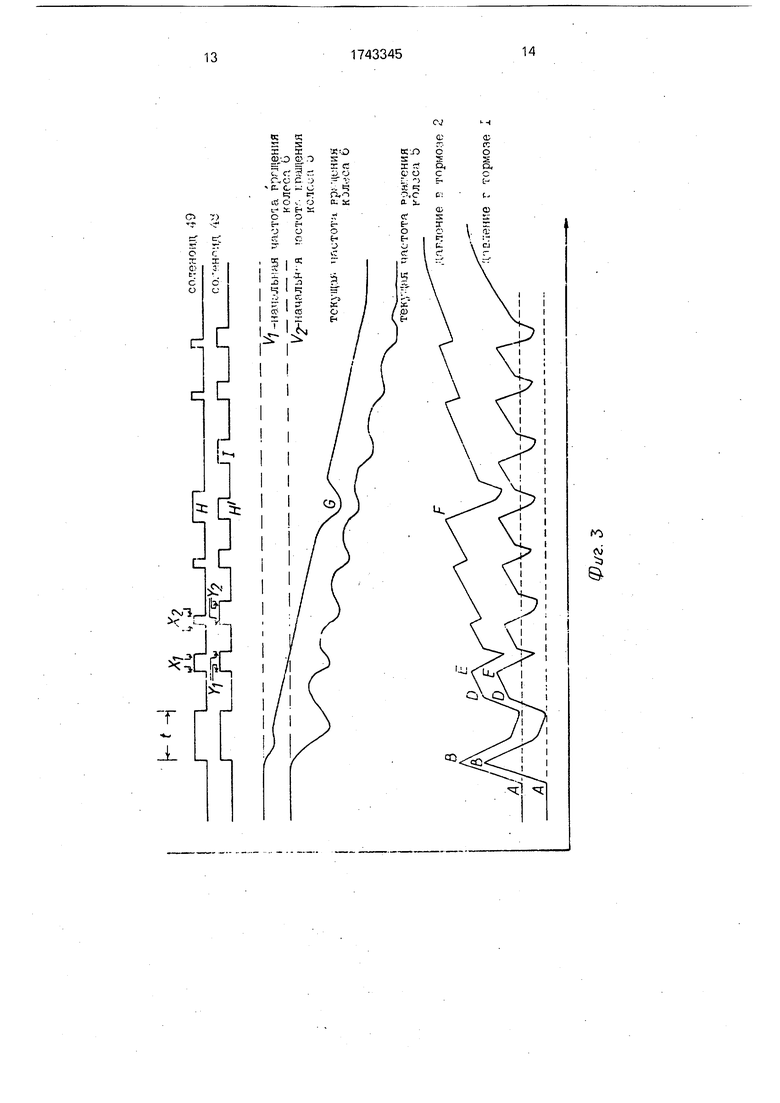
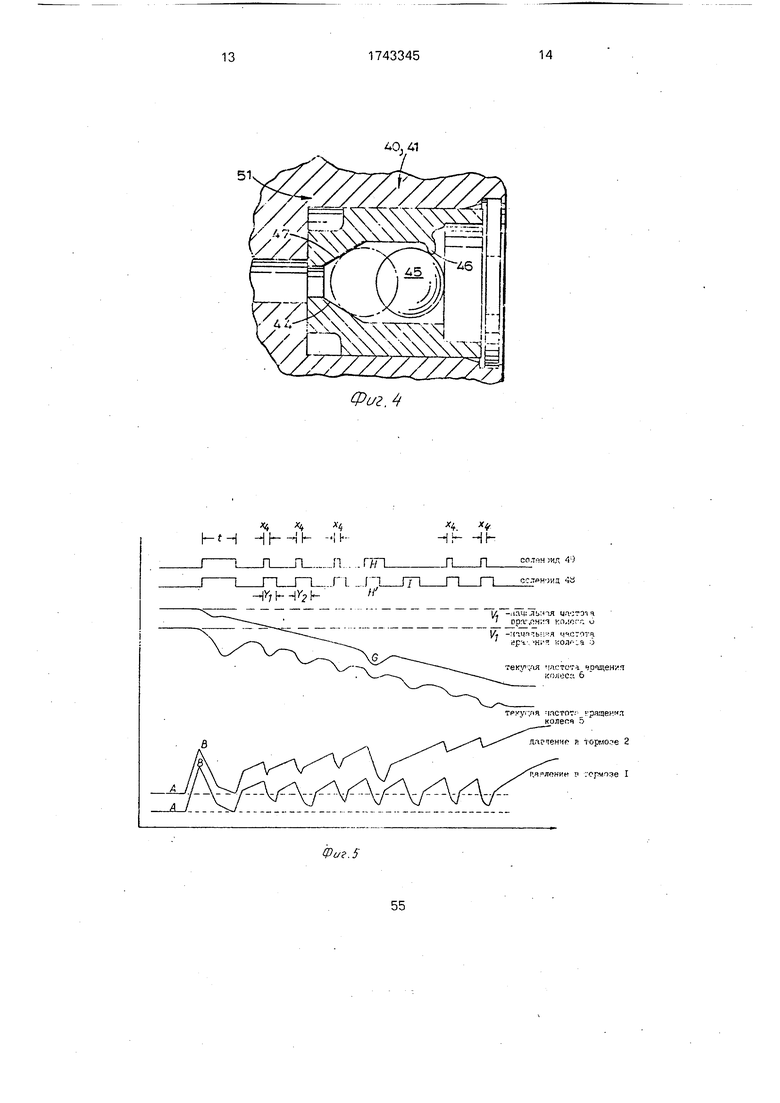
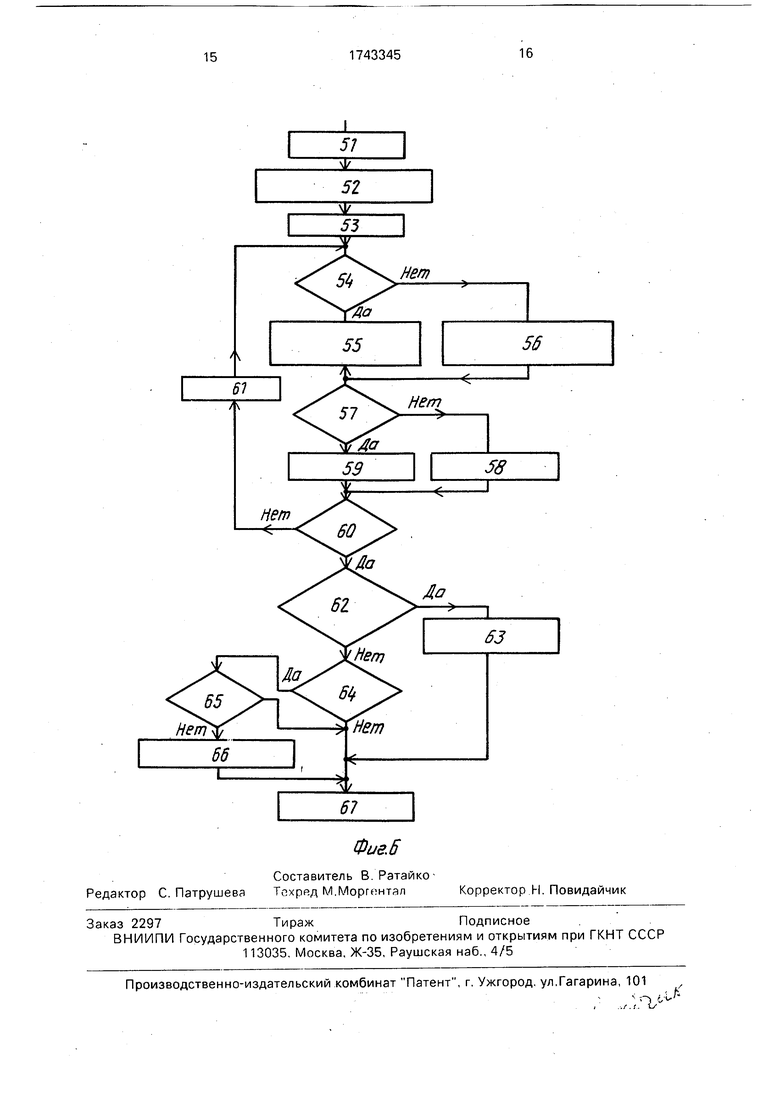
На фиг.1 изображена схема двухосного автомобиля, снабженного антиб/юкировоч- ной пневматической тормозной системой с управлением от ускорительных клапанов; на фиг.2 - схема системы для одной из двух осей; на фиг.З - характеристическая диаграмма; на фиг.4 - обратный клапан, разрез; на фиг.5 - альтернативная характеристическая диаграмма; на фиг.6 - алгоритм контроллера схем управления.
В антиблокироврчной пневматической тормозной системе установлены тормоза 1 4 на каждом из двух передних колес 5 и 6 на первой оси автомобиля и на двух задних колесах 7 и 8 на второй оси автомобиля соответственно. Каждое колесо снабжено соответственным датчиком 9-12 частоты вращения, причем выходные сигналы от датчиков подают в электронный контроллер 13 блокировки колес микроЭВМ, которая дифференцирует сигналы и подают токи питания для приведения в действие переднего и заднего релейных модуляторов 14 и 15 давления.
Каждый модулятор 14 и 15-управляет подачей рабочего пневматического давления к ускорительным клапанам 16 и 17 для каждого соответственного колеса от клапана 18(фиг.2)с приводом от педали я каждый ускорительный клапан 16 и 17 в с вою очередь управляет подачей воздуха под давлг нием из резервуара 19 и 20 к тормозам 1-4
Управляющее давление от клапана 18 подают во впускной канал 21 и через нормально открытый запорный клапан 22. приводимый в действие посредством соленоида 23, к двум ускорительным клапанам 16 и 17 по каналам 24 и 25 соответственно. В каждом канале 24 и 25 между запорным клапаном 22 и соответственным ускорительным клапаном 16. установлены обратные клапаны 26 и 27 и соленоидные
отсечные клапаны 28, 28 с нормально закрытым выпускным отверстием.
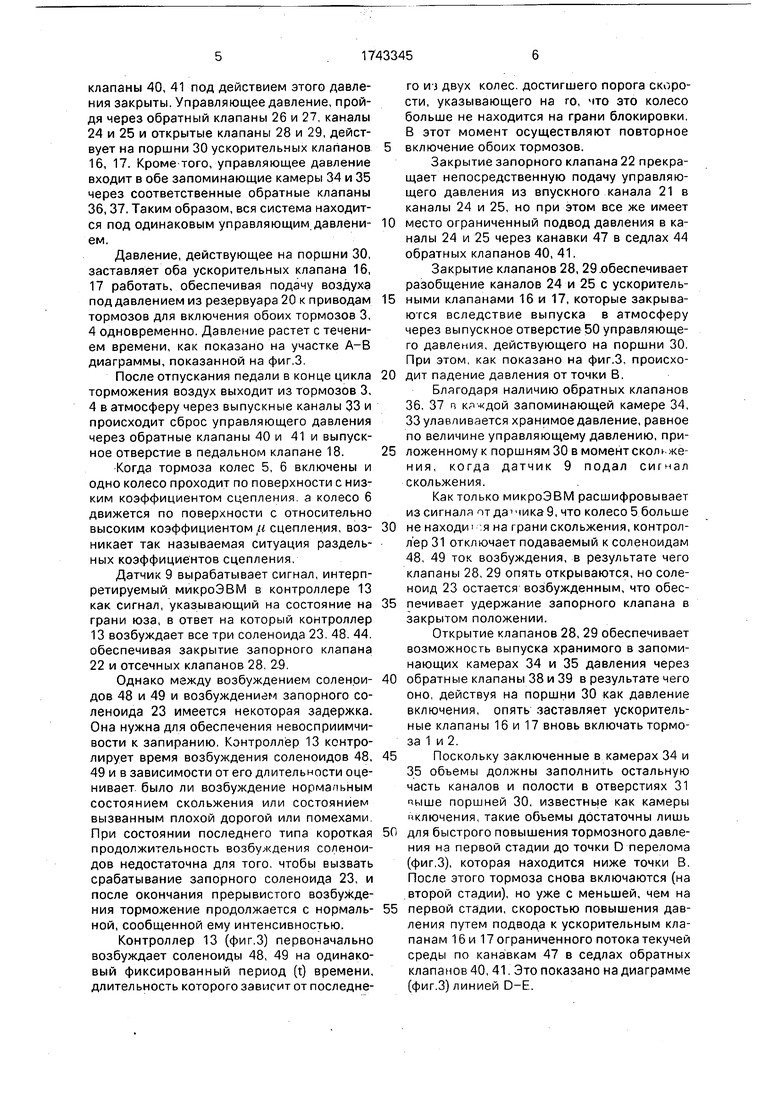
Каждый ускорительный клапан 16 и 17 содержит поршень 30, установленный в отверстии 31 и приводимый в действие (в ответ на управляющие давление) для управления главным клапаном 32 между резервуаром 20 соответственным тормозом 3, 4 и центральным выпускным каналом 33.
Между каждым соленоидными клапанами 28. 29 и обратными клапанами 26, 27 к каналам 2 25 подключены запоминающие камеры 34,35. Между соленоидными клапанами 28, 29 и камерами 34, 35 и между з шоминающими камерами 34, 35 и каналами 24 25 установлены обратные клапаны 36, 37 и 38 39.
Между двум обратными клапанами 26, 38 и 27, 3 установлены обратные клапаны
40 и 41 соответственно в каналах 42 и 43, ведущих от впускного канала 21 к каждому соответственному каналу 24, 25 на выходной стороне запорного клапана 22.
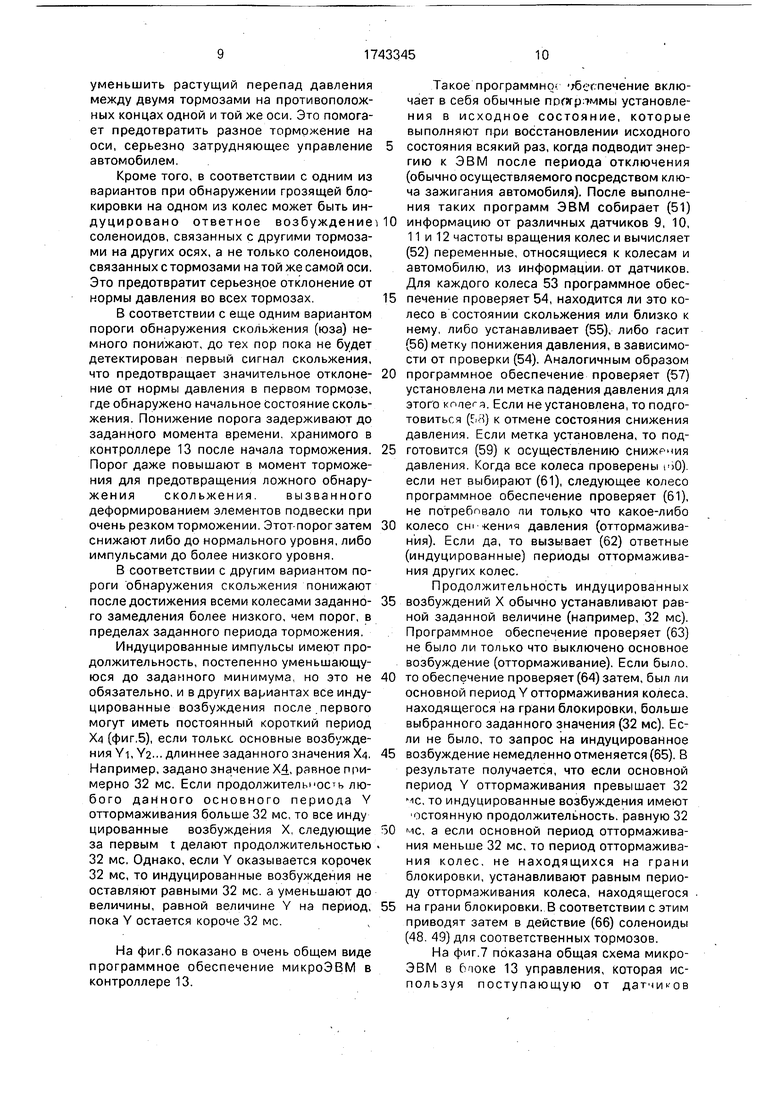
Каждый клапан 40, 41 содержит седло
44 в форме усеченного конуса и клапанный элемент в виде шарика 45, установленного с возможностью введения его в контакт с седлом 44. Перемещение шарика 45 в направлении от седла ограничено посредством трех распределенных по окружности направленных внутрь радиальных выступов 46, а в седле 44 имеется канавка 4/ позволяющая некоторый ограниченный расход воздуха мимо шарика 45, когда он находится в контакте с седлом 44.
Все клапаны 22, 40, 41, 36, 37, 38, 39, 28,
°9, 16 и 17 и другие элементы на каждой оси
размещены и образованы в общем корпусе.
В обычном нерабочем положении
(фиг.2) три соленоида 23, 48 и 49 обесточены, в результате чего запорный клапан 22 и клапаны 28 и 29 находятся в открытом положении. Оба ускорительных клапана 16, 17 закрыты для разобщения тормозов 3 и 4 с
резервуаром 20.
При приведении в действие клапана 18 управляющее давление поступает во впускной канал 21 и далее идет через открытый запорный клапан 22, поскольку обратные
клапаны 40, 41 под действием этого давления закрыты. Управляющее давление, пройдя через обратный клапаны 26 и 27, каналы 24 и 25 и открытые клапаны 28 и 29, действует на поршни 30 ускорительных клапанов 16, 17. Кроме того, управляющее давление входит в обе запоминающие камеры 34 и 35 через соответственные обратные клапаны 36, 37, Таким образом, вся система находится под одинаковым управляющим давлением.
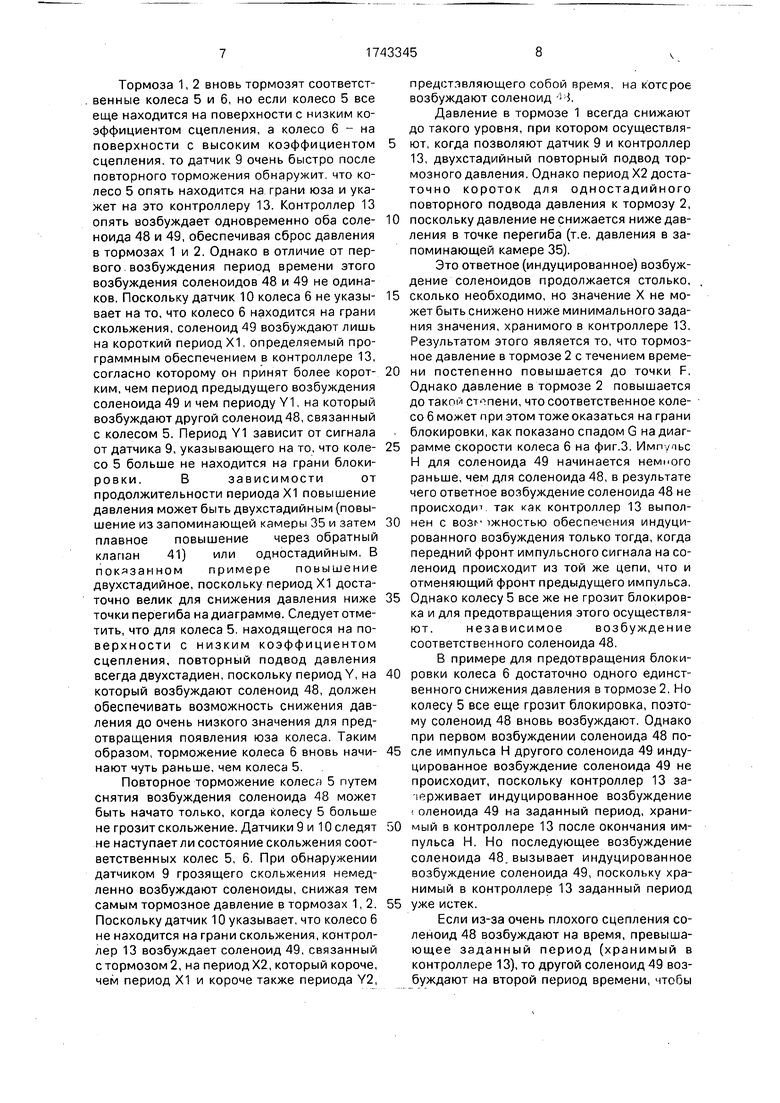
Давление, действующее на поршни 30, заставляет оба ускорительных клапана 16, 17 работать, обеспечивая подачу воздуха под давлением из резервуара 20 к приводам тормозов для включения обоих тормозов 3, 4 одновременно. Давление растет с течением времени, как показано на участке А-В диаграммы, показанной на фиг.З.
После отпускания педали в конце цикла торможения воздух выходит из тормозов 3, 4 в атмосферу через выпускные каналы 33 и происходит сброс управляющего давления через обратные клапаны 40 и 41 и выпускное отверстие в педальном клапане 18.
Когда тормоза колес 5, 6 включены и одно колесо проходит по поверхности с низким коэффициентом сцепления а колесо 6 движется по поверхности с относительно высоким коэффициентом tu сцепления, возникает так называемая ситуация раздельных коэффициентов сцепления.
Датчик 9 вырабатывает сигнал, интерпретируемый микроЭВМ в контроллере 13 как сигнал, указывающий на состояние на грани юза, в ответ на который контроллер 13 возбуждает все три соленоида 23 48. 44. обеспечивая закрытие запорного клапана 22 и отсечных клапанов 28 29.
Однако между возбуждением соленоидов 48 и 49 и возбуждением запорного соленоида 23 имеется некоторая задержка. Она нужна для обеспечения невосприимчивости к запиранию. Контроллер 13 контролирует время возбуждения соленоидов 48, 49 и в зависимости от его длительности оценивает было ли возбуждение нормальным состоянием скольжения или состоянием вызванным плохой дорогой или помехами При состоянии последнего типа короткая продолжительность возбуждения соленоидов недостаточна для того, чтобы вызвать срабатывание запорного соленоида 23, и после окончания прерывистого возбуждения торможение продолжается с нормальной, сообщенной ему интенсивностью.
Контроллер 13 (фиг.З) первоначально возбуждает соленоиды 48, 49 на одинаковый фиксированный период (t) времени, длительность которого зависит от последнего и з двух колес достигшего порога скорости, указывающего на го, что это колесо больше не находится на грани блокировки. В этот момент осуществляют повторное
включение обоих тормозов.
Закрытие запорного клапана 22 прекращает непосредственную подачу управляющего давления из впускного канала 21 в каналы 24 и 25, но при этом все же имеет
0 место ограниченный подвод давления в каналы 24 и 25 через канавки 47 в седлах 44 обратных клапанов 40, 41.
Закрытие клапанов 28, 29.обеспечивает разобщение каналов 24 и 25 с ускоритель5 ными клапанами 16 и 17, которые закрываются вследствие выпуска в атмосферу через выпускное отверстие 50 управляющего давления, действующего на поршни 30. При этом как показано на фиг.З. происхо0 дит падение давления от точки В.
Благодаря наличию обратных клапанов 36. 37 я запоминающей камере 34, 33 улавливается хранимое давление, равное по величине управляющему давлению, при5 ложенному к поршням 30 в моментcкoл же- ния, когда датчик 9 подал сигнал скольжения.
Как только микроЭВМ расшифровывает из сигнала от да чикаЭ, что колесо 5 больше
0 не находи я на грани скольжения, контроллер 31 отключает подаваемый к соленоидам 48, 49 ток возбуждения, в результате чего клапаны 28, 29 опять открываются, но соленоид 23 остается возбужденным, что обес5 печивает удержание запорного клапана в закрытом положении.
Открытие клапанов 28, 29 обеспечивает возможность выпуска хранимого в запоминающих камерах 34 и 35 давления через
0 обратные клапаны 38 и 39 в результате чего оно. действуя на поршни 30 как давление включения, опять заставляет ускорительные клапаны 16 и 17 вновь включать тормоза 1 и 2.
5Поскольку заключенные в камерах 34 и
35 объемы должны заполнить остальную часть каналов и полости в отверстиях 31 чыше поршней 30, известные как камеры нключения. такие объемы достаточны лишь
0 для быстрого повышения тормозного давления на первой стадии до точки D перелома (фиг.З), которая находится ниже точки В. После этого тормоза снова включаются (на второй стадии), но уже с меньшей, чем на
5 первой стадии, скоростью повышения давления путем подвода к ускорительным клапанам 16 и 17 ограниченного потока текучей среды по канавкам 47 в седлах обратных клапанов 40, 41. Это показано на диаграмме (фиг.З) линией D-E.
Тормоза 1, 2 вновь тормозят соответственные колеса 5 и 6, но если колесо 5 все еще находится на поверхности с низким коэффициентом сцепления, а колесо 6 - на поверхности с высоким коэффициентом сцепления, то датчик 9 очень быстро после повторного торможения обнаружит, что колесо 5 опять находится на грани юза и укажет на это контроллеру 13. Контроллер 13 опять возбуждает одновременно оба соле- ноида 48 и 49, обеспечивая сброс давления в тормозах 1 и 2. Однако в отличие от первого возбуждения период времени этого возбуждения соленоидов 48 и 49 не одинаков. Поскольку датчик 10 колеса 6 не указы- вает на то, что колесо 6 находится на грани скольжения, соленоид 49 возбуждают лишь на короткий период Х1. определяемый программным обеспечением в контроллере 13, согласно которому он принят более корот- ким, чем период предыдущего возбуждения соленоида 49 и чем периоду Y1, на который возбуждают другой соленоид 48, связанный с колесом 5. Период Y1 зависит от сигнала от датчика 9, указывающего на то, что коле- со 5 больше не находится на грани блокировки.Взависимостиот продолжительности периода Х1 повышение давления может быть двухстадийным (повышение из запоминающей камеры 35 и затем плавное повышение через обратный клапан 41) или одностадийным. В показанном примере повышение двухстадийное, поскольку период Х1 достаточно велик для снижения давления ниже точки перегиба на диаграмме. Следует отметить, что для колеса 5. находящегося на поверхности с низким коэффициентом сцепления, повторный подвод давления всегда двухстадиен, поскольку период Y, на который возбуждают соленоид 48, должен обеспечивать возможность снижения давления до очень низкого значения для предотвращения появления юза колеса. Таким образом, торможение колеса 6 вновь начи- нают чуть раньше, чем колеса 5.
Повторное торможение колеса 5 путем снятия возбуждения соленоида 48 может быть начато только, когда колесу 5 больше не грозит скольжение. Датчики 9 и 10 следят не наступает ли состояние скольжения соответственных колес 5, 6. При обнаружении датчиком 9 грозящего скольжения немедленно возбуждают соленоиды, снижая тем самым тормозное давление в тормозах 1,2. Поскольку датчик 10 указывает, что колесо 6 не находится на грани скольжения, контроллер 13 возбуждает соленоид 49, связанный с тормозом 2, на период Х2, который короче, чем период Х1 и короче также периода Y2,
представляющего собой время, на которое возбуждают соленоид -Ч,
Давление в тормозе 1 всегда снижают до такого уровня, при котором осуществляют, когда позволяют датчик 9 и контроллер 13, двухстадийный повторный подвод тормозного давления. Однако период Х2 доста- точно короток для одностадийного повторного подвода давления к тормозу 2, поскольку давление не снижается ниже давления в точке перегиба (т.е. давления в запоминающей камере 35).
Это ответное (индуцированное) возбуждение соленоидов продолжается столько, сколько необходимо, но значение X не может быть снижено ниже минимального задания значения, хранимого в контроллере 13, Результатом этого является то, что тормозное давление в тормозе 2 с течением времени постепенно повышается до точки F. Однако давление в тормозе 2 повышается до таком ст пени, что соответственное колесо 6 может при этом тоже оказаться на грани блокировки, как показано спадом G на диаграмме скорости колеса 6 на фиг.З. Имгг/пьс Н для соленоида 49 начинается немного раньше, чем для соленоида 48, в результате чего ответное возбуждение соленоида 48 не происходит так как контроллер 13 выполнен с возг 1жностью обеспечения индуцированного возбуждения только тогда, когда передний фронт импульсного сигнала на соленоид происходит из той же цепи, что и отменяющий фронт предыдущего импульса. Однако колесу 5 все же не грозит блокировка и для предотвращения этого осуществляют, независимое возбуждение соответственного соленоида 48.
В примере для предотвращения блокировки колеса б достаточно одного единственного снижения давления в тормозе 2, Но колесу 5 все еще грозит блокировка, поэтому соленоид 48 вновь возбуждают. Однако при первом возбуждении соленоида 48 после импульса Н другого соленоида 49 индуцированное возбуждение соленоида 49 не происходит, поскольку контроллер 13 задерживает индуцированное возбуждение 1оленоида 49 на заданный период, хранимый в контроллере 13 после окончания импульса Н. Но последующее возбуждение соленоида 48. вызывает индуцированное возбуждение соленоида 49, поскольку хранимый в контроллере 13 заданный период уже истек.
Если из-за очень плохого сцепления соленоид 48 возбуждают на время, превышающее заданный период (хранимый в контроллере 13), то другой соленоид 49 возбуждают на второй период времени, чтобы
уменьшить растущий перепад давления между двумя тормозами на противоположных концах одной и той же оси. Это помогает предотвратить разное торможение на оси, серьезно затрудняющее управление автомобилем.
Кроме того, в соответствии с одним из вариантов при обнаружении грозящей блокировки на одном из колес может быть индуцировано ответное возбуждение соленоидов, связанных с другими тормозами на других осях, а не только соленоидов, связанных с тормозами на той же самой оси. Это предотвратит серьезное отклонение от нормы давления во всех тормозах.
В соответствии с еще одним вариантом пороги обнаружения скольжения (юза) немного понижают, до тех пор пока не будет детектирован первый сигнал скольжения, что предотвращает значительное отклоне- ние от нормы давления в первом тормозе, где обнаружено начальное состояние скольжения. Понижение порога задерживают до заданного момента времени, хранимого в контроллере 13 после начала торможения. Порог даже повышают в момент торможения для предотвращения ложного обнаружения скольжения. вызванного деформированием элементов подвески при очень резком торможении. Этот-порог затем снижают либо до нормального уровня, либо импульсами до более низкого уровня.
В соответствии с другим вариантом пороги обнаружения скольжения понижают после достижения всеми колесами заданно- го замедления более низкого, чем порог, в пределах заданного периода торможения.
Индуцированные импульсы имеют продолжительность, постепенно уменьшающуюся до заданного минимума но это не обязательно, и в других вариантах все индуцированные возбуждения после первого могут иметь постоянный короткий период X/ (фиг.5), если только основные возбуждения YI, Ґ2... длиннее заданного значения . Например, задано значение Х4, равное примерно 32 мс. Если продолжительность любого данного основного периода Y оттормаживания больше 32 мс, то все инду цированные возбуждения X. следующие за первым t делают продолжительностью 32 мс. Однако, если Y оказывается корочек 32 мс, то индуцированные возбуждения не оставляют равными 32 мс. а уменьшают до величины, равной величине Y на период, пока Y остается короче 32 мс.
На фиг.6 показано в очень общем виде программное обеспечение микроЭВМ в контроллере 13.
Такое программно /бегпечение включает в себя обычные погтр-тммы установления в исходное состояние, которые выполняют при восстановлении исходного состояния всякий раз, когда подводит энергию к ЭВМ после периода отключения (обычно осуществляемого посредством ключа зажигания автомобиля). После выполнения таких программ ЭВМ собирает (51) информацию от различных датчиков 9, 10, 11 и 12 частоты вращения колес и вычисляет (52) переменные, относящиеся к колесам и автомобилю, из информации, от датчиков. Для каждого колеса 53 программное обеспечение проверяет 54, находится ли это колесо в состоянии скольжения или близко к нему, либо устанавливает (55), либо гасит (56) метку понижения давления, в зависимости от проверки (54). Аналогичным образом программное обеспечение проверяет (57) установлена ли метка падения давления для этого . Если не установлена, то подготовиться (Ы) к отмене состояния снижения давления. Если метка установлена, то подготовится (59) к осуществлению снижения давления. Когда все колеса проверены ) если нет выбирают (61), следующее колесо программное обеспечение проверяет (61), не потребовало пи только что какое-либо колесо cm -кения давления (оттормаживания). Если да, то вызывает (62) ответные (индуцированные) периоды оттормаживания других колес.
Продолжительность индуцированных возбуждений X обычно устанавливают равной заданной величине (например, 32 мс). Программное обеспечение проверяет (63) не было ли только что выключено основное возбуждение (оттормаживание). Если было, то обеспечение проверяет (64) затем, был ли основной период Y оттормаживания колеса, находящегося на грани блокировки, больше выбранного заданного значения (32 мс). Если не было, то запрос на индуцированное возбуждение немедленно отменяется (65). В результате получается, что если основной период Y оттормаживания превышает 32 мс, то индуцированные возбуждения имеют остоянную продолжительность, равную 32 мс. а если основной период оттормаживания меньше 32 мс, то период оттормаживания колес, не находящихся на грани блокировки, устанавливают равным периоду оттормаживания колеса, находящегося на грани блокировки. В соответствии с этим приводят затем в действие (66) соленоиды (48. 49) для соответственных тормозов.
На фиг.7 показана общая схема микро- ЭВМ в бпоке 13 управления, которая используя поступающую от датчиков
информацию, обеспечивает работу соленоидов по оттормаживанию, показанную на фиг.З или 5.
Формула изобретения Антиблокировочная тормозная система для автомобиля, содержащая источник текучей среды под давлением, подключенный к тормозным контурам колесных тормозов, встроенные в указанные контуры релейные модуляторы давления, каждый из которых оборудован электромагнитным приводом, электрически связанным с соответствующим каналом контроллера блокировки колес, подключенного входами к выходам датчиков скольжения и выдающего управляющие импульсные сигналы по соответствующему каналу на электромагнитный привод модулятора давления тормоза колеса нахо0
5
дящегося в режиме нгм юрмой блокировки, для растормаживай.-я i юледнего, о т- личающаяся тем, что, с целью повышения курсовой устойчивости и сокращения тормозного пути, она снабжена формирователями дополнительных импульсных сигналов, формируемых при возникновении управляющих импульсных сигналов в одном из каналов контроллера, подаваемых на электромагнитные приводы модуляторов давления тормозов колес, не находящихся в режиме неминуемой блокировки и имеющих длительность меньше длительности управляющих импульсных сигналов в каналах контролера по крайней мере в случае, когда длительность управляющих импульсных сигналов больше минимального заданного значения.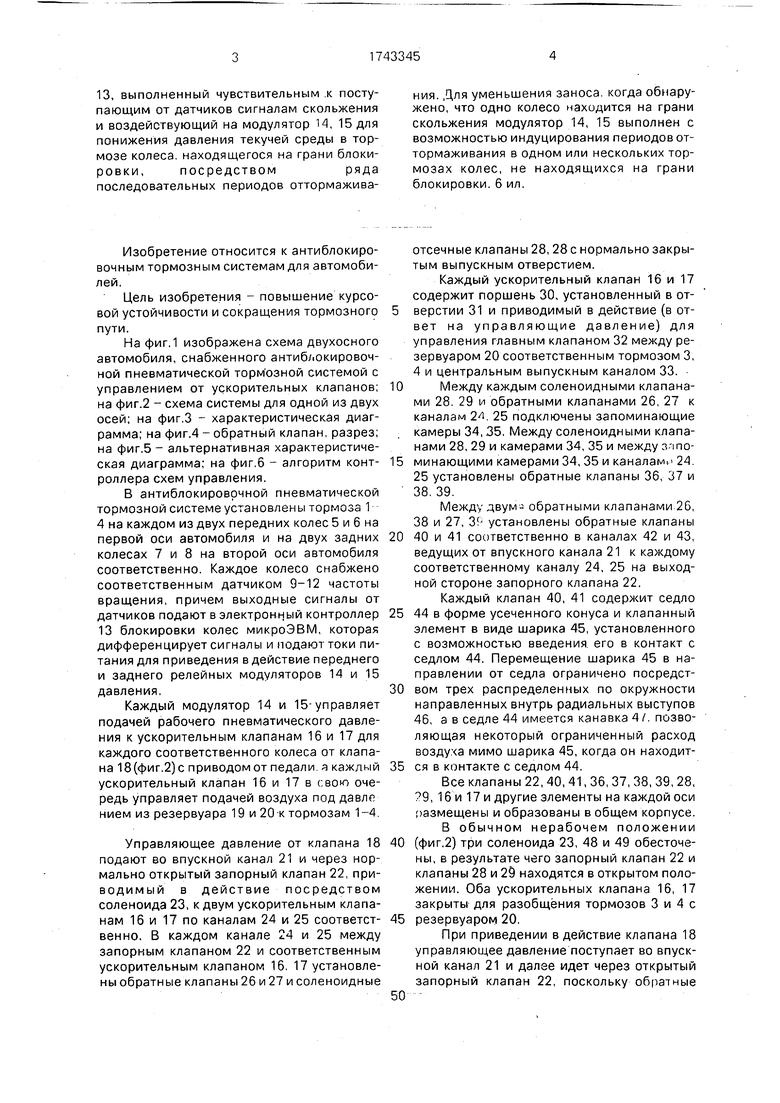
Изобретение относится к автомобильному транспорту. Цель изобретения - повышение курсовой устойчивости и сокращение тормозного пути Антиблокировочная iop- мозная система для автомобиля содержит источник текучей среды для приведения в действие .,ких колесных тормозов 1- 4, модуляторы 14, 15 давления расположенные между источником текучей среды и тормозами, датчики 9-12 для обнаружения скольжения нескольких колес и контролер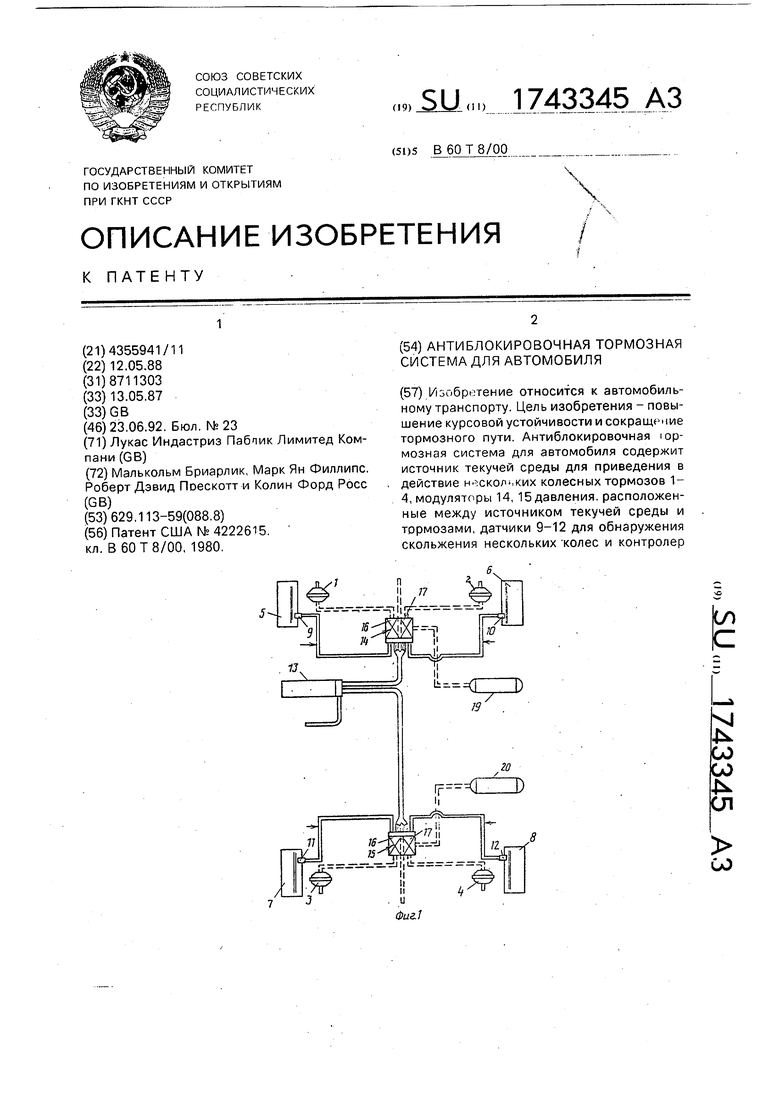
33 32
Фиг. 2
3233
а
п тпрмочо 2
Ч ютрние г тормозе 1
Фиг. 3
xt, Xif 4
Н h- Ч h -i .Г7П.
.rt .J-.L
Фиг. 4
. t
Hr- Hh
JL
со.т°ч жд 4) )ид 4И
/ -1ач:л 4- я и,т:т31ч сраг,,ч. Т оло i и
1Л -ч щтчь мчсто а
р-1. -К, ЛОЛ- - -i )
я -ягто г роден ч (Солее;1. 6
,ПЯ члстот «ращения колес. Ь
дяпенмг Р TOpf-io e 2 ие р . I
| Патент США № 4222615 кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
