Изобретение относится к литейной технике, в частности к устройствам для простановки стержней в литейную полуформу, и может найти применение при.массовом и крупносерийном про- 5 изводстве литейных форм, а также при навешивании и снятии грузов с движущихся ветвей подвесного конвейера, например гальванических подвесок.
Известны роботы для выполнения 10 технологических операций, содержащие поворотное основание с прикрепленной к нему рукой и захват, выполненный в виде заливочного тигля, привода продольного перемещения и поворо- 15 та 1.
Известны роботы, выполняющие вспомогательные операции загрузки и разгрузки деталей и заготовок f2l
Недостатком данных роботов яв- 20 ляется то, что подвижность захватов ограничена, а нетехнологичное конструктивное исполнение роботов в целом снижает их эксплуатационные возможности. 25.
Наиболее близким по технической сущности и достигаемому эффекту к изобретению является манипулятор,, содержащий робот с захватами и механизмом поворота, подвесные конвейе- зо ры,, силовые цилиндры и блок управления из1
Однако подвижность исполнитель .ного органа известного устройства, в частности захвата, также ограниче- ,на, -что снижает его технологические возможности.
Кроме того, известное устройство занимает большую производственную площадь, так как блок управления на- Q ходится в стороне от устройства.
Целью изобретения является повышение производительности, улучшение условий труда и качества получаемых (изделий. д,
Указанная цель достигается тем, 4Vo устройство для простановки стержней , содержащее робот с захватами и механизмом поворота, подвесные конвейеры, силовые цилиндры и блок 50 управления, снабжено кассетой, несущей замки, предназначенной для взаимодействия с захватами робота и подвесными конвейерами посредством установленных в корпусе захва -а ро- 55 бота ключей и смонтированного на подвесном конвейере преобразователя пе-. ремещения кассеты.
Кроме того, кассета выполнена в виде рамки, на горизонтальных стержнях которой установлены подвижные пластины с закрепленными на них замками. /
При этом преобразователь перемещения выполнен в виде шарнирной -подвески, имеющей форму параллелограмма, закрепленной на каретке подвесного конвейера и приводного рычажного упора, жестко aaKpenjieHHoro на направляющей подвесного конвейера.
Причем .робот расположен между подвесными конвейерами и снабжен фиксатором механизма поворота.
Замки выполнены в виде пружинных элементов.
Ключи выполнены в виде силовых цилиндров.
Фиксатор механизма поворота выполнен в виде силового цилиндра.
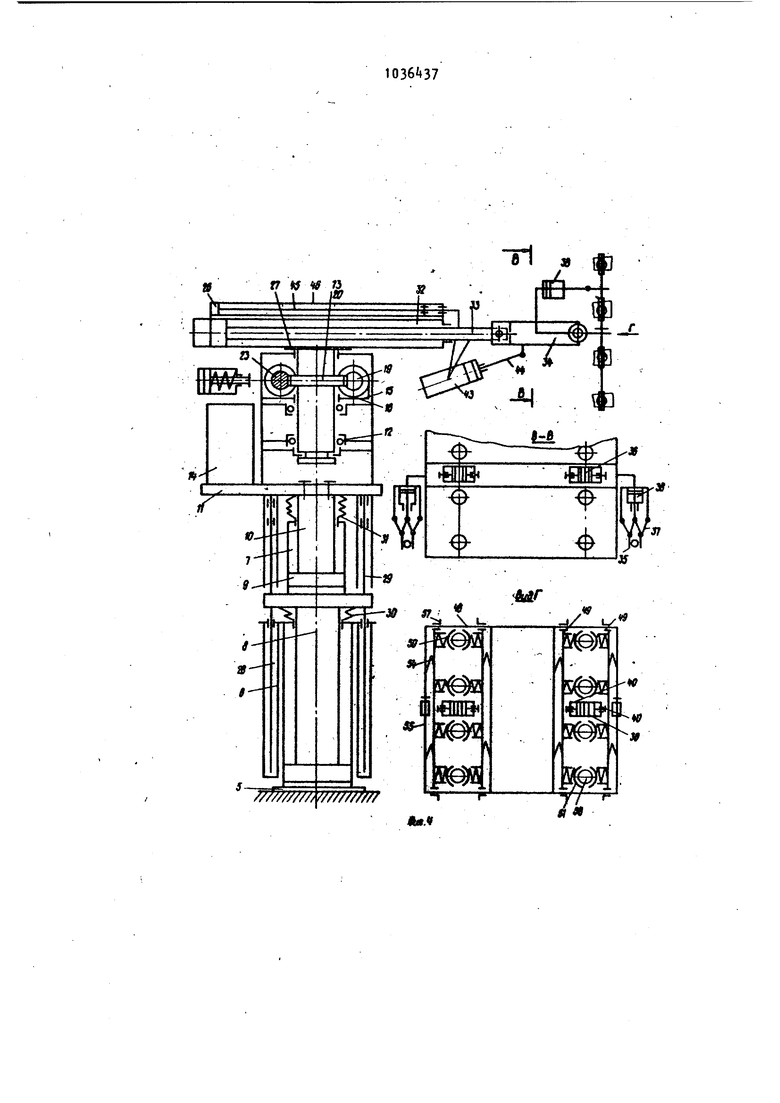
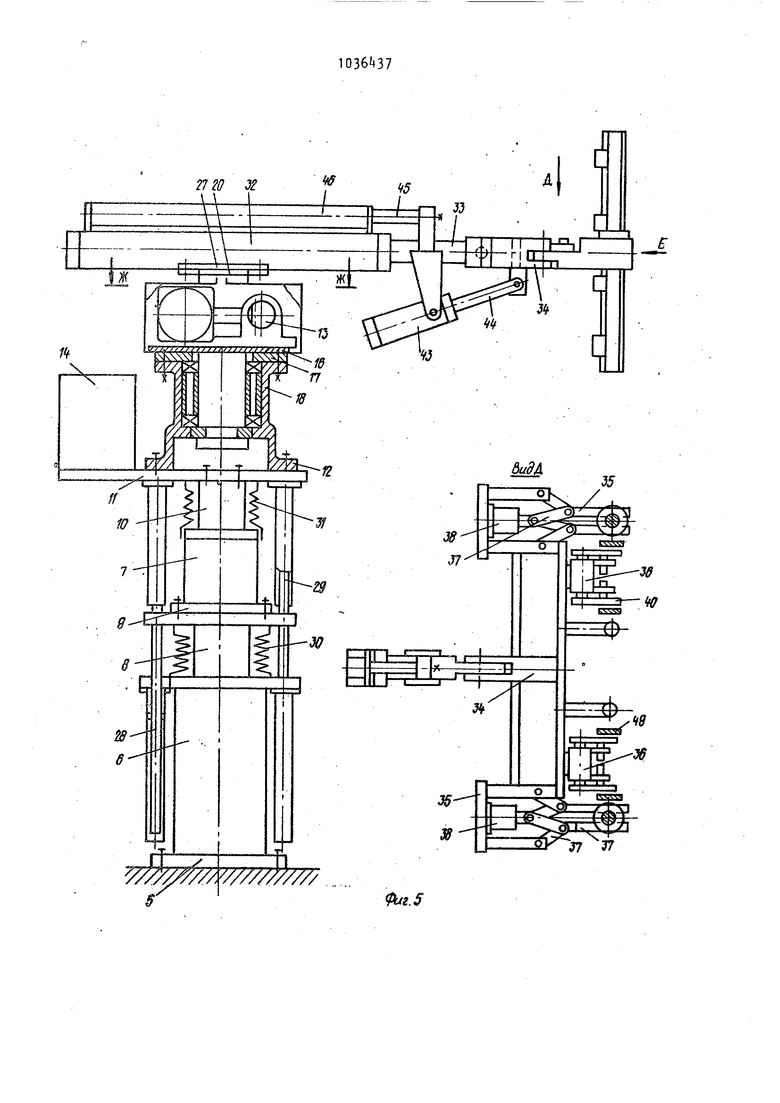
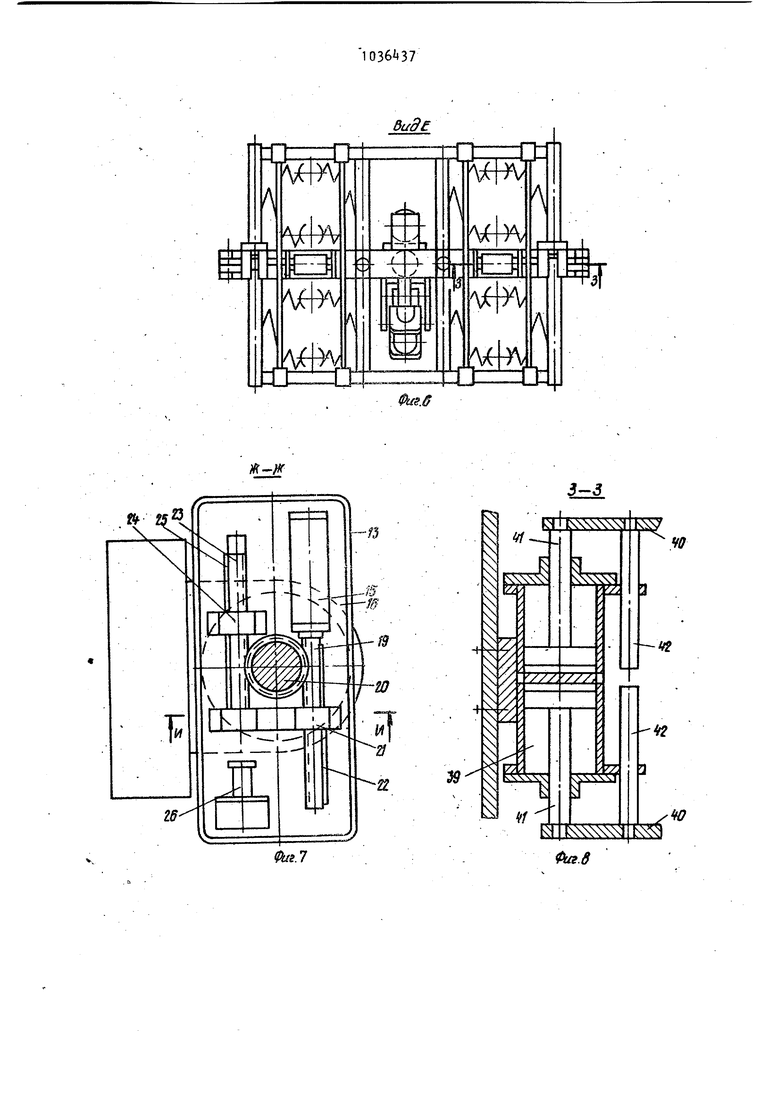
На фиг. 1 изображена общая компоновка устройства, вид в плане; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. кинем1атическая схема робота и кассеты; на фиг. 5 робот, общий вид; на фиг. б -, вид Е на фиг. 5; на фиг. 7 - разрез Ж-Ж на фиг. 5; на фиг. 8 - разрез 3-3 на фиг. 6; на фиг. 9 - разрез И-И на фиг. 7; на фиг. 10 - кассета, общий вид с разрезами; на фиг. 11 - преобразователь, общий вид; на фиг. 12 - вид Л на фиг. 11; на фиг. 13 - разрез М-М на фиг. 11; на фиг. И - разрез Н-Н на фиг. 11; на фиг. 15 - разрез 0-0 на фиг. 12; на фиг. 16 - разрез П-П на фиг. 11; на фиг. 17 разрей Р-Р на фиг. 13; на фиг, 18 - разрез С-С на фиг. 11.
Устройство содержит подвесной конвейер 1 (фиг. 1-3),робот 2, кассету, 13 и преобразователь Ц.
Робот 2 (фиг. М и 5) содержит подъемное основание 5, состоящее из жестко связанных силовых цилиндров 6 и 7.
На штоке 8 силового цилиндра 6 закреплен корпус 9 си 1ового цилиндра 7На штоке 10 силового цилиндра 7 закреплена плита 11, на которой смонтированы опорный узел 12 механизма 13 поворота и блок И управления. Механизм 13 поворота (фиг. 7) состоит из силового цилиндра 15. закрепленного на плите 16. Плита 16 смонтирована на крышке 17 (фиг. 5) корпуса 18 опорного узла 12. Шток-рейка 19 (фиг. 7) силового цилиндра 15| связанная с осью-шестерней 20, расположена в опоре 21. Для предотвращения радиального смещения шток-рейка 19 снабжена шпонкой 22. Рейка 23 также связана с осью-шестерней 20 и движется в опорах 21 и 2. Рейка 23 снабжена шпонкой 25. На плите 16 закреплены также опоры 21 и 2А и фиксатор 26, выполненный в виде силового цилиндра большего диаметра, чем силовой цилиндр 15. Фиксатор 26 фиксирует поворот платформы 27 (фиг. 5) на 90 .и 180. Направляющие 28 и 29 предохраняют штоки 8 и 10 силовых цилиндров 6 и 7 от радиального смещения, а кожухи 30 и 31 от пыли и грязи. Платформа 27, закрепленная на оси-шестерне 20, жестко связана с силовым цилиндром 32, на шток-руке 33 которого шарнирно закреплен корпус З Робот выполнен с двумя захватами 35, которые жестко закреплены на корпусе З. Ключи Зб также расположены на корпусе З- Захват 35 сострит из рычагов 37 и силового цилиндра 38. Ключ 36 (фиг. 8) состоит из силовых цилиндров 39, пластин 0, закрепленных на штоках i, направляющих 2. Силовой цилиндр k3 (фиг. 5), шарнирно закрепленный на шток-руке 33, повррота и фиксации «ор.служит для пуса З с помощью штока Д, шарнирно соединенного с корпусом 3. Направляющая 5 жестко связана со штокрукой 33, находящейся в направляющем корпусе 4б, служит для предохранения захватов 35 от радиального смеще ния. Направляющий корпус 46 жестко соединен с цилиндром 32. Кассета 3 (фиг. 10) состоит из жесткой облегченной стержневой рамки 47, на горизонтальных стержнях k8 которой сидят подвижные пластины 49. К пластинам 49 прикреплены замки 50, 1состоящие из пружинных элементов 51, ;расположенных в пазах 52 корпуса 53. Для прижима пластины 49 служат пру жинные элементы 54, опирающиеся на вертикальные стержни 55 с упорными буртиками 5б рамки 47. Движение подвижных пластин 49 от пружинных элементов 54 ограничено упорами 57. Кассета 3 служит для транспортировки стержней 5. Замки 50 удерживают стержни 58 от выпадания с помощью пружинных элементов 51. С помощью преобразователя 4 (фиг. 11) горизонтальное движение кассеты 3 переходит в вертикальное с целью снятия кассеты. Преобразователь 4 состоит из опоры 59, жестко закрепленной на каретке 60, сидящей в цепи 61 подвесного конвейера 1. На опоре 59 шарнирно закреплены ровной длины рычаги 62, на нижних концах которых шарнирно-закреллены траверса 63 с.упорными роликами 64. На траверсе 63 шарнирно закреплена подвеска б5, которая несет кассету 3. На рельсовом пути 66 подвесного конвейера 1 смонтированы отклоняющиеся рычаги б7, которые должны занимать вертикальное положение с- помощью силового цилиндра 68, закрепленного на рычагах б7. Траверса 63, опора 59 и рычаги 62, снабженные шарнирами, соединены в виде параллелограмма и Образуют подвижную часть преобразователя 4. Неподвижная часть преобразователя выполнена в виде приводного рычажного упорна, содержащего рычаги 67 и силовой цилиндр б9, причем рычаги 67 жестко закреплены на опоре б9 которая также жестко установлена на рельсовом пути 66. На нижних концах рычагов б7 имеются вертикальные упоры 70 и наклонная плоскость 71, служащая для постепенного возврата рычагов. 62 и траверсы 63 в исходное положение. Пружина 72 служит для удержания рычагов б7 в наклонном положении при отсутстВИИ рабочей среды в силовом цилинДре 68. Исходное положение узлов и механизмов. Рабочая среда Подведена в бесштоковые полости силовых цилиндров 6, 15 (фиг. 7), 38, 68 и фиксатора 26, а также в штоковые полости силовых цилиндров 7, 32 (фиг. 5) и ключей 36. Захваты 35 находятся напротив движущейся цепи 61, нагруженной кассетами 3 со стержнями 58. Устройство работает следующим образом. Все команды даются с блока 14 управления. При подходе нагруженной кассеты 3 к месту снятия ее рычаги б7 с помощью силового цилиндра 68 занимают вертикальное положение. Упорные ролики 6 упираются в вертикальные упоры 70 кассета 3 прекращает горизонтая ное движение и за счет отклонеНИИ рычагов б2 движется вертикально вверх. В элгот момент шток-рука 33 с раскрытыми захватами 35. с помощью силового цилиндра 32 подается вперед Захваты 35 охватывают вертикальные стержни 55 кассеты 3 и с помощью силового цилиндра 7 быстро поднимаются вверх, осуществляя подъем кассеты 3. При этом они упираются в буртики 56 вертикальных стержней 55 кассеты 3. В крайнем верхнем положении кассеты 3 происходит закрытие захватов 35 с помощью силовых цилиндров 38 и отвод кассеты 3 от преобразователя к поворотной вертикальной оси робота 2 с помощью шток-руки 33 силового цилиндра 32. Затем силовой цилиндр 15 осуществляет горизонтальный, поворот кас.сеты 3 со шток-рукой 33 на ЭО, а рычаги б7 с помощью силового цилиндра 68 занимают наклонное положение, с целью освобождения места для прохода других кассет, не подлежащих снятию роботом 2с В конце поворота рейка 23 (фиг. 7) упирается в упор фиксатора 26, что дает точный останов и фиксацию кассеты 3 над полуформой низа (на фиг. 1 полуформа низа показана тонкими линиями). Силовой цилиндр k3 по ворачивает на 90 кассету 3 с захватами 35. После поворота кассеты 3 со стержнями 58 (фиг. 10) осуществляется укладка стержней 58 в полуформу низа с помацью силового цилиндра 6 (фиг. k и 5). Уложив стержни 58 в полуформу, открываются замки 50 (фиг. 10) кассеты 3. с помощью ключей 36- Пластинами 0, закрепленными на силовом цилиндре 39 отжимаются подвижные пластины 9 .кассеты 3 (фиг. 10), пружинные элементы 31 находящиеся в пазах , отводятся от стержней 58. Замки 50 открыты, стержни 58 лежат в нижней полуформе. Освобожденная от стержней 58 кассета 3 (фиг. и 5) с захватами 35, штокрукой 33i механизмом 13 поворота, опорным узлом 12, блоком lif управления и силовым цилиндром 7 поднимает я с помощью силового цилиндра 6 и / занимает крайнее верхнее положение. Силовой цилиндр поворачивает ее с захватами 35 на 90. Одновременно силовой цилиндр 15 с помощью шток-рейки 19 оси-шестерни 20, рейки 2.3 при отводе рабочей среды от фиксатора 26 осуществляет горизонтальный поворот платформы 27 и захватов 35 с кассетой 3 на 90 в сторону возвратного движения Цепи 61 подвесного конвейера 1. Силовой цилиндр 68 (фиг. 11) ставит рычаги б7 в вертикальное положение. Упорные ролики б доходят до вертикальных упоров 70, подвеска 65 прекращает горизонтальное движение и за счет отклонения рычагов 62 начинает двигаться вертикально вверх. Шток-рука 33 с захватами 35 и кассетой 3 с помощью силового цилиндра 32 (фиг. и 5) подходят к крайне лу переднему положению, а потом опускаются с помощью силового цилиндра 7- Одновременно Силовой цилиндр 38 раскрывает захваты 35- Кассета 3 верхним горизонтальным стержнем вешается на подвеску 6.5 (фиг. 11)1, которая уже совместно с кассетой продолжает движение вверх до прохождения вертикального упора 70, чего совместно с упорными роликами 64 плавно сходит по наклонной плоскости 71. Рычаги 62 занимают вертикальное положение и )есут кассету 3, висящую на подвеске 65, к месту ее загрузки стержнями 5В. Рычаги 67 после навески освобожденной кассеты 3 занимают наклонное положение с помощью силового цилиндра 68. В крайнем нижним положении штока 10 (фиг. ч и 5) силового цилиндра 7 происходит отвод захватдв 35 от движущейся цепи 60 подвесного конвейера 1 с помощью силового цилиндра 32 Захваты 35, силовой цилиндр 32 с платформой 27 поворачиваются в горизонтальной плоскости на 180 и занимают исходное положение.. Цикл работы устройства повторяется. Предложенное изобретение позволяет расширить технологические возможности устройства, поднять производительность з а счет исключения ручного труда в литейных цехах и снизить брак литейных форм за качественной простановки стержней в литейные полуформы.
X
tc:
гШЖШЗ
nr
nt
/////////////)(////f//////////X//////
Ein
f
/wl//x
.2
&идб
EH
L-J


| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1637909A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Автоматический формовочный блок | 1982 |
|
SU1247152A1 |
| Устройство для автоматической простановки стержней | 1985 |
|
SU1268281A1 |
| Устройство для комплектации печатной корреспонденции | 1989 |
|
SU1678462A1 |
| Робот | 1988 |
|
SU1538994A1 |
| Автоматическая линия для формования и вулканизации покрышек | 1973 |
|
SU430605A1 |
| Устройство для шаговой подачи стопы заготовок | 1984 |
|
SU1194544A1 |
| Автоматизированный комплекс для штамповки | 1982 |
|
SU1058684A1 |
| Кокильный карусельный комплекс | 1990 |
|
SU1720791A1 |






«
«y «у
/ ty
ВиЭе
.§
.
МЛКУч СчЧУ
NSy
f/1
W
5
УУУ7.
//7,
1036437
ФавЮ
et
tI «v
- 7
Фиг. 15 .
Фиг. 15
ft-И
f-P
6Ъ
Фиг.П
