Изобретение относится к подъемно- транспортному машиностроению, а именно к конструкции руки манипулятора, и предназначено для транспортирования штучных грузов между рабочими местами.
Цель изобретения - повьшение удобства при эксплуатации и надежности в работе.
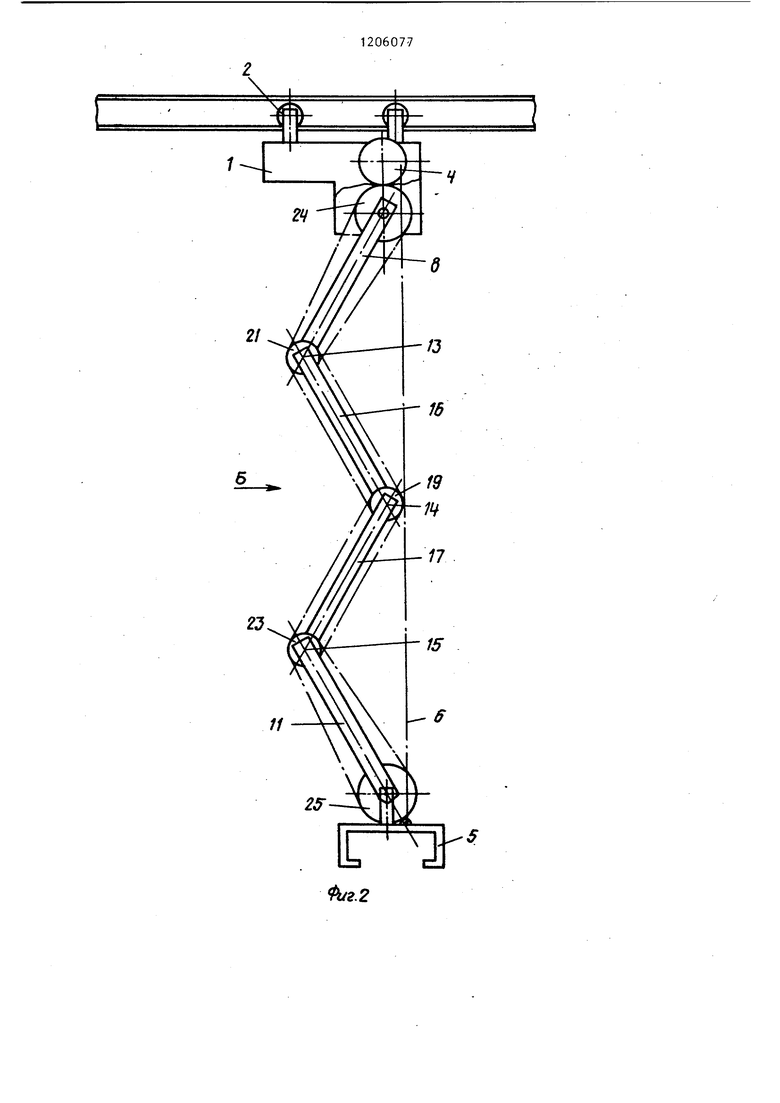
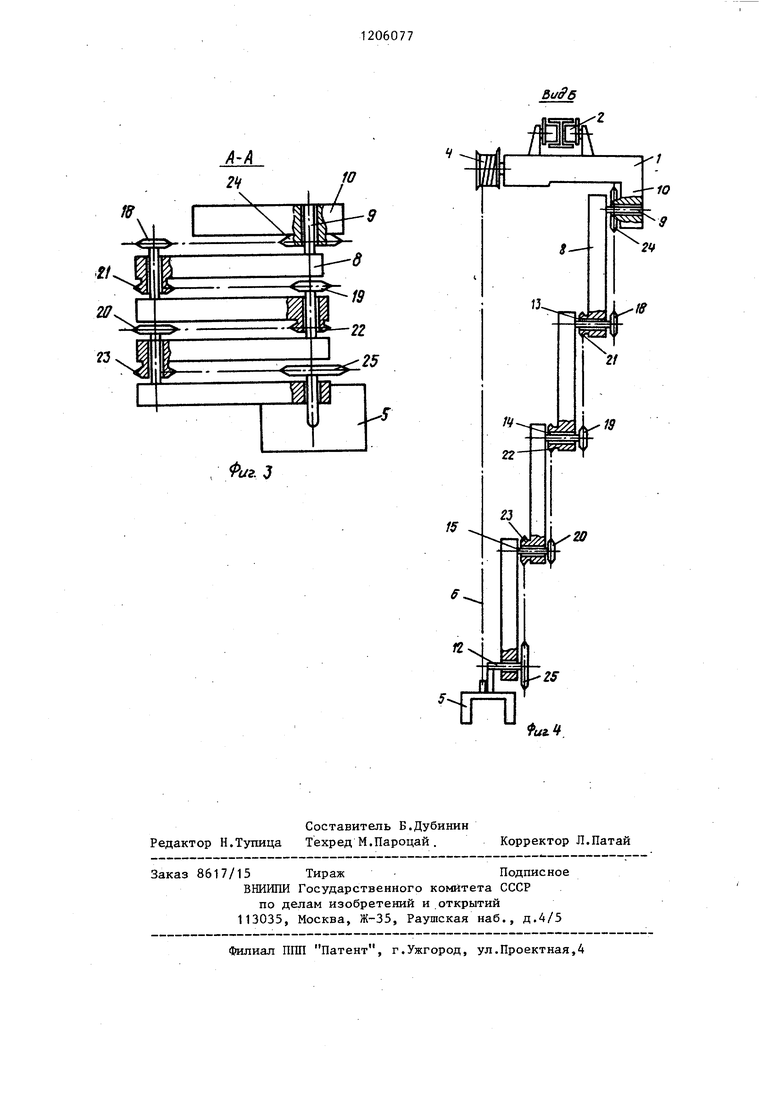
На фиг. 1 показан манипулятор, рука в транспортном положении, общий вид; на фиг. 2 - то же, рука в рабочем положении; на фиг 3 - сечение А-А на фиг. 1; на фиг. 4 - вид Б на фиг. 2.
Манипулятор содержит каретку 1 с ходовыми катками 2, установленную на монорельсе 3, механизм 4 подъема (изображен условно), захват 5, подвешенный на гибком элементе 6 механизма подъема, складьюающуюся рычаж- но-шарнирную руку 7, верхний рычаг 8 которой через шарнир 9 закреплен на кронштейне 10 каретки 1, а нижний рычаг 11 через шарнир 12 соединен с грузозахватным устройством 5. Рука 7 состоит из последовательно соединенных шарнирами 13-15 рычагов 16 и 17, количество которых четно и определяется необходимой высотой подъема груза. Каждый из рычагов 16,17 и 11 на своем верхнем конце снабжен соответственно звездочками 18-20. Рычаг 8 снабжен звездочкой 21. На нижнем конце рычагов 16,17, и 11 расположены
звездочки 22 и 23. Диаметры звездочек 18-23 одинаковы. Соосно шарниру 9 на кронштейне 10 каретки 1закреплена- звездочка 24, а на захвате 5 звездочка 25. Диаметры звездочек 24 и 25 вдвое больше диаметров всех остальных звездочек. . Звездочки 24 и 18, 22 и 21, 19 и 20, 23 к 25 попарно кинематически
(цепью) соединены между собой.
Все рычаги 8,16,17 и 11 расположены со смещением один относительно другого и лежат в разных вертикапь- ных плоскостях.
Манипулятор работает следукяцим образом.
В исходном положении (рука сложена) все рычаги параллельны и лежат в одной горизонтальной плоскости.
После остановки манипулятора над рабочим местом механизмом 4 подъема опускают подвешенный на тросе 6 захват 5. Рука 7 раскладывается. Шарниры 12 и 14 перемещаются строго п-о вертикали ввиду того, что передаточное отношение звездочек 24 и 18, 25 и 23 составляет 2:1. Рычаги 16 и 11,
8 и 17 перемещаются попарно параллельно, так как диаметры звездочек на рычагах одинаковы. Таким образом, обеспечивается пространственная фиксация груза в процессе его перемещения по вертикали.
г.2
18
f/
иг. J
ZS
ITD
Ui4
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1425075A1 |
| Вертикальный транспортер | 1987 |
|
SU1507710A1 |
| Устройство для загрузки и разгрузки стеллажей | 1986 |
|
SU1399226A1 |
| ПОДВЕСНОЕ МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2014 |
|
RU2561559C1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Манипулятор | 1974 |
|
SU528193A1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2038252C1 |
| Манипулятор | 1978 |
|
SU685614A1 |
| СТОЛ ПЕРЕГРУЗОЧНЫЙ | 2018 |
|
RU2695863C1 |
| Кран-манипулятор К.Б.Розина | 1986 |
|
SU1567506A1 |
Составитель Б.Дубинин Редактор Н.Тупица Техред М.Пароцай . Корректор Л.Патай
Заказ 8617/15 Тираж Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Филиал ПГШ Патент, г.Ужгород, ул.Проектная,4
| Манипулятор | 1977 |
|
SU659376A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
