Изобретение относится к машиностроению, а именно к системам магнитного подвеса (СМП) роторных машин, и может найти применение в компрессорах, турбодетандерах и других установках.
Известна структурная схема управления пятиканальным магнитным подвесом электродвигателя, в состав которой входят микроконтроллер, на входе которого стоит АЦП, а выходом служат сигналы широтно-импульсной модуляции (ШИМ-управления), которые поступают на усилители мощности, выходные ключи которых формируют токи в обмотках электромагнитов, которые создают усилия, воздействующие на ротор, вызывая его перемещения. Последние отслеживаются датчиками положения ротора, информация от которых поступает на микроконтроллер, а также на микроконтроллер через устройства гальванической развязки поступает информация от датчиков тока, измеряющих ток в обмотках электромагнитов и выполняющих роль местной обратной связи (Кочетов Д.А., Цифровое управление и мониторинг системы магнитного подвеса для роторных машин / Д.А. Кочетов, Д.В. Кравцов, А.П. Сарычев // Конверсия в машиностроении. 1999. №1.-С.36-39).
Недостатком известного устройства является то, что исполнение СМП с датчиками положения ротора предполагает наличие кабеля связи между роторной машиной и шкафом управления СМП, причем в компрессорной технике длина кабелей может составлять десятки и более метров, а наличие длинной линии связи снижает помехозащищенность системы.
Известен принцип технологии «самоконтроля», в которой датчик положения и электромагнит являются единым элементом, информация о положении ротора формируется на основе сравнения процессов в математической модели системы "электромагнит-ротор" с реальными процессами (Информационный бюллетень №5, апрель 2006 г., фирма S2M, книга Magnetic Bearings. Theory, Design, and Application to Rotating Machinery. Springer-Verlag Berlin Heidelberg, 2009, c. 435-454.).
Недостатками известного способа является сложность схемы «самоконтроля».
Задачей предлагаемого изобретения является упрощение схемы "самоконтроля" и создание более простого устройства бездатчикового магнитного подвеса, которое позволит упростить конструкцию опор роторной машины и повысить помехозащищенность СМП.
Упрощение схемы "самоконтроля" обеспечивается за счет непосредственного измерения в усилителях мощности крутизны изменения переменной составляющей тока пилообразной формы и последующего формирования сигнала отклонения ротора. Создание более простого устройства бездатчикового магнитного подвеса, которое позволит упростить конструкцию опор роторной машины и повысить помехозащищенность СМП, обеспечивается за счет отсутствия датчиков положения ротора, а также отсутствия кабеля связи роторной машины со шкафом управления СМП. Совпадение точек (сечений вала) съема информации о положении ротора и точек приложения компенсирующих сил электромагнитных опор, удерживающих ротор в заданном (центральном) положении, упрощает условия обеспечения динамической стабилизации вращающегося ротора.
Технический результат заключается в том, что упрощается схема "самоконтроля" и улучшается динамическая стабилизация вращающегося ротора.
Технический результат изобретения достигается способом формирования сигналов отклонения ротора в системах магнитного подвеса роторных машин с управлением тока посредством широтно-импульсной модуляции (ШИМ-управлением) в электромагнитах, который заключается в подаче сигналов ШИМ-управления на вход усилителя мощности, с выхода которого сигналы в виде напряжений прямоугольной формы подают на электромагнит, и одновременной подачи сигналов тока на преобразователь тока электромагнита с последующим выделением переменной составляющей тока пилообразной формы, преобразования ее в сигнал, пропорциональный крутизне пилообразного сигнала тока в интервале коммутации сигнала ШИМ-управления, и последующего его преобразования в сигнал отклонения ротора.
Технический результат изобретения достигается тем, что устройство формирования сигналов отклонения ротора в системе магнитного подвеса (СМП) роторной машины по первому варианту содержит один или два идентичных контура формирования сигнала и блок сравнения, контур содержит усилитель мощности с ШИМ-управлением, выход которого соединен с электромагнитом СМП, преобразователь тока электромагнита, с которым последовательно соединены фильтр подавления коммутационных помех, дифференцирующий блок и блок выборки-хранения, другой вход которого предназначен для подачи синхроимпульсов, согласованных с частотой коммутации сигнала ШИМ-управления, а выход блока выборки-хранения соединен с входом блока сравнения, выход которого является выходом устройства.
Предпочтительно, при наличии одного электромагнита в канале ШИМ-управления, устройство содержит один контур формирования сигналов, а второй вход блока сравнения предназначен для подачи сигнала, соответствующего центральному положению ротора.
Предпочтительно, при наличии двух электромагнитов в канале ШИМ-управления устройство содержит два контура формирования сигналов в одном канале управления СМП, а выходы блоков выборки-хранения контуров соединены соответственно с первым и вторым входами блока сравнения.
Технический результат изобретения достигается также тем, что устройство формирования сигналов отклонения ротора в системе магнитного подвеса (СМП) роторной машины по второму варианту содержит два усилителя мощности с ШИМ-управлением, выход каждого из которых соединен с соответствующим электромагнитом СМП, два преобразователя тока электромагнита, каждый из которых включен в цепь соответствующего электромагнита СМП, а выходы которых соединены в противофазе с блоком сравнения, с которым последовательно соединены фильтр подавления коммутационных помех, дифференцирующий блок и блок выборки-хранения, другой вход которого предназначен для подачи синхроимпульсов, а выход которого является выходом устройства.
Преобразователь тока в обоих вариантах устройства может иметь следующие частные случаи выполнения.
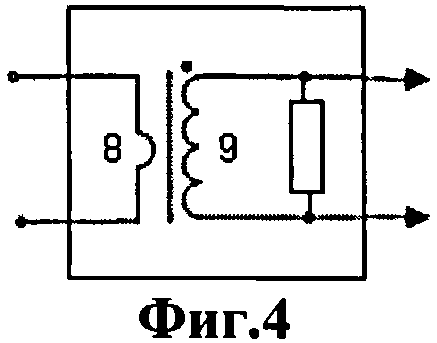
В одном случае, преобразователь тока электромагнита может содержать трансформатор тока, первичная обмотка которого включена в цепь обмотки электромагнита СМП, вторичная обмотка с параллельно включенным шунтом соединена с входом фильтра подавления коммутационных помех.
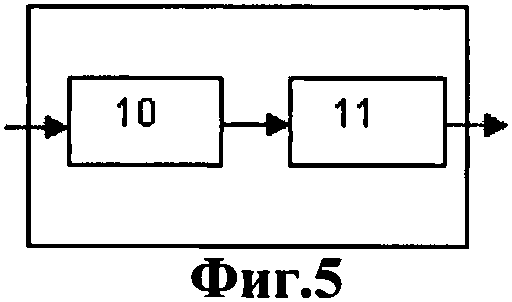
В другом случае, преобразователь тока электромагнита может содержать датчик тока на основе эффекта Холла, включенный в цепь электромагнита, и соединенный с указанным датчиком блок выделения переменной составляющей тока, выход которого соединен с входом фильтра подавления коммутационных помех.
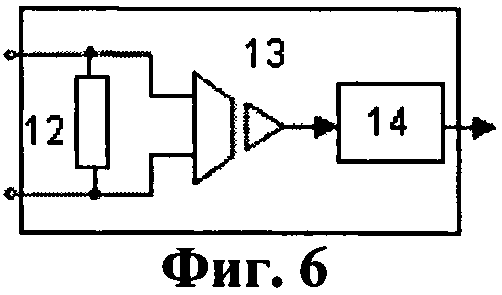
В третьем случае, преобразователь тока электромагнита может содержать датчик тока на основе резистора, включенного в цепь электромагнита, включенный параллельно ему измерительный усилитель с оптоэлектронной развязкой и соединенный с указанным усилителем блока выделения переменной составляющей тока, выход которого соединен с входом фильтра подавления коммутационных помех.
Сущность изобретения поясняется чертежами, где:
на фиг.1 изображена блок-схема устройства формирования сигналов - отклонения ротора в СМП по первому варианту с одним контуром формирования сигналов для конструкций с одним электромагнитом в одном канале управления;
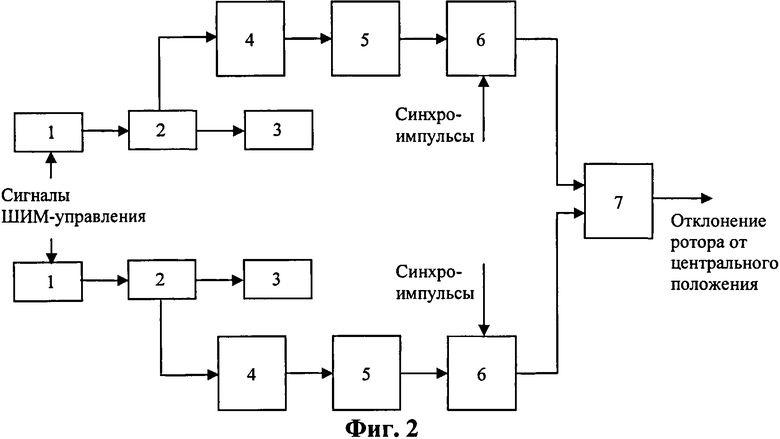
на фиг.2 изображена блок-схема устройства формирования сигналов отклонения ротора в СМП по первому варианту с двумя контурами формирования сигналов в одном канале управления СПМ для конструкций с двумя электромагнитами в одном канале управления;
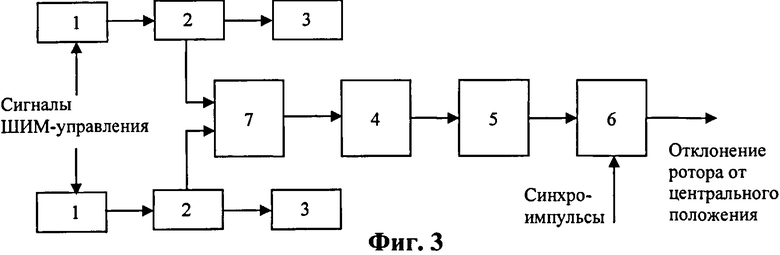
на фиг.3 изображена блок-схема устройства формирования сигналов отклонения ротора в СМП по второму варианту с одним контуром формирования сигналов для конструкций с двумя электромагнитами в одном канале управления;
на фиг.4 изображен блок преобразователя тока электромагнита на основе трансформатора тока;
на фиг.5 изображен блок преобразователя тока на основе датчика, использующего эффект Холла;
на фиг.6 изображен блок преобразователя тока на основе резистора и измерительного усилителя с оптоэлектронной развязкой.
Преимуществом предлагаемого изобретения является совпадения точек (сечений вала) съема информации о положении ротора и точек приложения компенсирующих сил электромагнитных опор, удерживающих ротор в центральном положении, что в ряде случаев существенно улучшает динамическую стабилизацию вращающегося ротора.
В предлагаемом изобретении реализуется способ непосредственного измерения в интервалов коммутации сигнала ШИМ-управления крутизны изменения переменной составляющей тока пилообразной формы и последующего формирования сигнала отклонения ротора.
Устройство (фиг.1) формирования сигналов отклонения ротора в системах магнитного подвеса (СМП) роторных машин по первому варианту для конструкции с одним электромагнитом в одном канале управления содержит контур формирования сигнала (фиг.1) и блок 7 сравнения. Контур содержит усилитель 1 мощности с ШИМ-управлением, который соединен с электромагнитом 3 СМП и преобразователь 2 тока электромагнита. С преобразователем 2 последовательно соединены фильтр 4 подавления коммутационных помех, дифференцирующий блок 5 и блок 6 выборки-хранения, другой вход которого (фиг.1) предназначен для подачи синхроимпульсов. Синхроимпульсы согласованы с частотой коммутации сигнала ШИМ-управления. Выход блока 6 выборки-хранения соединен с входом блока 7 сравнения, выход которого является выходом устройства. А другой выход блока 7 сравнения (фиг.1) предназначен для подачи сигнала, соответствующего центральному положению ротора. Дифференцирующий блок 5 преобразует линейно-нарастающие и линейно-убывающие фронты пилообразного сигнала тока в прямоугольные импульсы напряжения, амплитуда которых пропорциональна крутизне сигнала тока.
Устройство (фиг.2) формирования сигналов отклонения ротора в системах магнитного подвеса (СМП) роторных машин по первому варианту для конструкций с двумя электромагнитами в одном канале управления содержит два контура формирования сигналов в одном канале управления СПМ ротора и блок 7 сравнения, каждый контур содержит усилитель 1 мощности с ШИМ-управлением, который соединен с электромагнитом 3 СМП, преобразователь 2 тока электромагнита 3, включенный в цепь электромагнита. С выходом преобразователя 2 тока последовательно соединены фильтр 4 подавления коммутационных помех, дифференцирующий блок 5 и блок 6 выборки-хранения, другой вход которого (фиг.2) предназначен для подачи синхроимпульсов. Синхроимпульсы согласованы с частотой коммутации сигнала ШИМ-управления. Выходы блоков 6 выборки-хранения контуров формирования сигналов соединены соответственно с первым и вторым входами блока 7 сравнения, выход которого является выходом устройства (фиг.2).
Устройство (фиг.3) формирования сигналов отклонения ротора в системах магнитного подвеса (СМП) роторных машин по второму варианту для конструкций с двумя электромагнитами в одном канале управления содержит два усилителя 1 мощности с ШИМ-управлением, выход каждого из которых соединен с соответствующим электромагнитом 3 СМП, два преобразователя 2 тока электромагнита 3, каждый из которых включен в цепь соответствующего электромагнита 3 СПМ. Выходы преобразователей 2 тока соединены в противофазе с блоком 7 сравнения (фиг.3), с которым последовательно соединены фильтр 4 подавления коммутационных помех, дифференцирующий блок 5 и блок 6 выборки-хранения, другой вход которого предназначен для подачи синхроимпульсов, а выход которого является выходом устройства (фиг.3).
Способ формирования сигналов отклонения ротора в системах магнитного подвеса роторных машин с ШИМ-управлением тока в электромагнитах осуществляется следующим образом с помощью предложенных устройств.
Способ формирования сигналов отклонения ротора в системах магнитного подвеса роторных машин с ШИМ-управлением тока в электромагнитах с помощью устройства с одним контуром формирования сигналов для конструкций с одним электромагнитом в одном канале управления (фиг.1) осуществляется следующим образом.
Сигналы ШИМ-управления подают на вход усилителя 1 мощности контура (фиг.1), с выхода усилителя 1 мощности сигналы в виде напряжений прямоугольной формы подают на электромагнит 3 СМП, в результате чего за счет индуктивной реакции электромагнита 3 в цепи электромагнита 3 протекает постоянный ток с переменной составляющей, близкой по форме к пилообразной. Одновременно сигналы тока подают на преобразователь 2 тока электромагнита 3. В качестве преобразователя 2 тока используют трансформатор 8 тока (фиг.4), первичную обмотку которого включают в цепь обмотки электромагнита 3 СМП, вторичную обмотку соединяют с параллельно включенным шунтом 9, или датчик 10 тока (фиг.5) на основе эффекта Холла, который включают в цепь электромагнита 3, выход которого соединяют с блоком 11 выделения переменной составляющей тока, или датчик 12 тока на основе резистора (фиг.6), который включают в цепь электромагнита 3, параллельно которому включают измерительный усилитель 13 с оптоэлектронной развязкой, выход которого соединяют с входом блока 14 выделения переменной составляющей тока (фиг.6). Преобразователь 2 тока включают последовательно с электромагнитом 3. На выходе преобразователя 2 тока выделяют переменный сигнал тока, близкий по форме к пилообразному. Полученный сигнал подают на фильтр 4 подавления коммутационных помех для подавления высокочастотного сигнала. Отфильтрованный сигнал подают на дифференцирующий блок 5 для преобразования линейно-нарастающих и линейно-убывающих фронтов пилообразного сигнала тока в прямоугольные импульсы напряжения, амплитуда которых пропорциональна крутизне сигнала тока. Сигнал прямоугольной формы подают на блок 6 выборки-хранения, на другой вход которого (фиг.1) подают синхроимпульсы. Моменты подачи синхроимпульсов согласовывают с частотой коммутации сигнала ШИМ-управления. Их устанавливают в моменты между фронтами сигнала ШИМ-управления один раз за период коммутации. На выходе блока 6 выборки-хранения получают сигнал положения ротора в виде ступенчатой во времени функции. Полученный сигнал подают на вход блока 7 сравнения, на другой вход которого (фиг.1) подают сигнал, соответствующий центральному положению ротора. На выходе блока 7 сравнения получают сигнал отклонения ротора от центрального положения.
Способ формирования сигналов отклонения ротора в системах магнитного подвеса роторных машин с ШИМ-управлением тока в электромагнитах, устройство для осуществления которого содержит два контура формирования сигналов для конструкций с двумя электромагнитами в одном канале управления системы магнитного подвеса ротора и блок сравнения (фиг.2), осуществляется следующим образом.
Сигналы ШИМ-управления подают на усилители 1 мощности контуров (фиг.2), с выходов усилителей 1 мощности сигналы в виде напряжений прямоугольной формы подают на электромагниты 3 СМП, в результате чего за счет индуктивной реакции электромагнитов 3 в цепях электромагнитов 3 протекает постоянный ток с переменной составляющей, близкой по форме к пилообразной. Одновременно сигналы тока подают на преобразователи 2 тока электромагнитов 3. В качестве преобразователей 2 тока (фиг.2) используются такие же преобразователи 2 тока (фиг.4 - фиг.6), как и в одноконтурном устройстве (фиг.1). Преобразователи 2 тока включают последовательно с электромагнитами 3. На выходе преобразователей 2 тока выделяют переменные сигналы тока, близкие по форме к пилообразным. Полученные сигналы подают на фильтры 4 (фиг.2) подавления коммутационных помех для фильтрации сигнала. Отфильтрованные сигналы подают на дифференцирующие блоки 5 для преобразования линейно-нарастающих и линейно-убывающих фронтов пилообразных сигналов тока в прямоугольные импульсы напряжения, амплитуда которых пропорциональна крутизне сигнала тока. Сигналы прямоугольной формы подают на блоки 6 выборки-хранения, на соответствующие другие входы которых (фиг.2) подают синхроимпульсы. Моменты подачи синхроимпульсов согласованы с частотой коммутации сигнала ШИМ-управления. Их устанавливают в моменты между фронтами сигнала ШИМ-управления один раз за период коммутации. На соответствующих выходах блоков 6 выборки-хранения (фиг.2) формируют сигналы положения ротора в виде ступенчатой во времени функции. Полученные сигналы подают в противофазе на входы блока 7 сравнения (фиг.2). На выходе блока 7 сравнения получают разностной сигнал, который является сигналом отклонения ротора от центрального положения.
Способ формирования сигналов отклонения ротора в системах магнитного подвеса роторных машин с ШИМ-управлением тока в электромагнитах, устройство для осуществления которого содержит один контур формирования сигнала для конструкций с двумя электромагнитами в одном канале управления системы магнитного подвеса ротора, осуществляется следующим образом.
Способ формирования сигналов отклонения ротора в системах магнитного подвеса роторных машин с ШИМ-управлением тока в электромагнитах (фиг.3), заключающийся в том, что сигналы ШИМ-управления подают на усилители 1 мощности канала управления (фиг.3). С выходов усилителей мощности сигналы в виде напряжений прямоугольной формы подают на электромагниты 3 СМП, в результате чего за счет индуктивной реакции электромагнитов 3 в цепях электромагнитов 3 протекает постоянный ток с переменной составляющей, близкой по форме к пилообразной. Одновременно сигналы тока подают на преобразователи 2 тока электромагнитов 3. В качестве преобразователей 2 тока (фиг.3) используются такие же преобразователи тока (фиг.4 - фиг.6) как в одноконтурном устройстве (фиг.1). Преобразователи 2 тока включают последовательно с электромагнитами 3. На выходе преобразователей 2 тока выделяют переменные сигналы тока, близкие по форме к пилообразной. Полученные сигналы подают в противофазе на входы блока 7 сравнения (фиг.3), на выходе которого получают разностной сигнал. Полученный сигнал подают на фильтр 4 (фиг.3) подавления коммутационных помех для фильтрации сигнала. Отфильтрованный сигнал подают на дифференцирующий блок 5 для преобразования линейно-нарастающих и линейно-убывающих фронтов пилообразных сигналов тока в прямоугольные импульсы напряжения, амплитуда которых пропорциональна крутизне сигнала тока. Сигналы прямоугольной формы подают на блок 6 выборки-хранения, на соответствующий другой вход которого (фиг.3) подают синхроимпульсы. Моменты подачи синхроимпульсов согласовывают с частотой коммутации сигнала ШИМ-управления. Их устанавливают в моменты между фронтами сигнала ШИМ-управления один раз за период коммутации. На соответствующем выходе блока 6 выборки-хранения (фиг.3) формируют сигнал в виде ступенчатой во времени функции, который является сигналом отклонения ротора от центрального положения.
Предлагаемый способ формирования сигналов отклонения ротора электромагнита СМП заключается в следующем. Из теории электрических цепей известно, что при формировании тока в индуктивности методом ШИМ на обмотку электромагнита подаются прямоугольные импульсы напряжения с амплитудой ±U. Подача импульсов напряжения положительной или отрицательной полярности осуществляется электронными ключами выходного каскада усилителя мощности с ШИМ-управлением. Регулирование тока при ШИМ-управлении осуществляется путем изменения длительности подачи импульсов положительного (первый интервал коммутации) и отрицательного (второй интервал коммутации) напряжения при постоянном периоде коммутации. Учитывая, что в электромагнитах СМП индуктивность обмоток L достаточно велика, а активное сопротивление незначительно, то процессы изменения тока в интервалах коммутации с достаточной степенью точности определяются соотношением

где знак "+" соответствует первому интервалу коммутации, а знак "-" - второму.
В установившихся режимах работы ток в электромагнитах при ШИМ-управлении содержит постоянную и переменную составляющие, причем обычно первая составляющая тока значительно превышает вторую, что достигается за счет большей длительности первого интервала коммутации по сравнению со вторым интервалом. Переменная составляющая по форме близка к пилообразной с практически линейно-нарастающим и линейно-убывающим фронтами. Из-за наличия зазоров в электромагнитах СМП их индуктивность L с достаточной степенью точности определяется соотношением
где µ0 - магнитная проницаемость воздуха;
w - суммарное число витков электромагнита;
S - сечение стали магнитопровода электромагнита;
δ∑ - суммарный воздушный зазор в цепи магнитопровода.
В электромагнитах с двумя полюсами δ∑=2·δ, где δ - зазор между полюсами статора и ротором электромагнита.
Подставив (2) в (1) и разрешив относительно (получим

Из соотношения (3) следует прямая зависимость зазора (между статором и ротором электромагнита от крутизны изменения тока  (линейно-нарастающего в первом интервале коммутации сигнала ШИМ-управления или линейно падающего во втором интервале).
(линейно-нарастающего в первом интервале коммутации сигнала ШИМ-управления или линейно падающего во втором интервале).
Положение ротора (можно записать как

где δ0 - величина зазора, соответствующая центральному положению ротора, м;
Δδ - величина отклонения ротора от центрального положения, м.
Тогда, подставив (3) в (4) получим величину отклонения ротора
где Δδ - величина отклонения ротора от центрального положения, м;
µ0=4π·10-7 - магнитная проницаемость зазора, Гн/м;
w - суммарное число витков электромагнита;
S - сечение стали магнитопровода электромагнита, м2;
U - напряжение питания выходного каскада усилителя мощности с ШИМ-управлением, В;
- крутизна сигнала пилообразной формы в интервале коммутаций сигнала ШИМ-управления, А/с;
δ0 - величина зазора, соответствующая центральному положению ротора, м.
Таким образом, способ выделения сигнала о положении ротора заключается в измерении крутизны тока в каждом такте сигнала ШИМ-управления и последующем преобразовании этого сигнала в сигнал отклонения ротора от центрального положения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АСИНХРОННОГО УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2010 |
|
RU2450412C1 |
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО | 2002 |
|
RU2224219C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2361356C1 |
| Устройство для стабилизации магнитного подвеса ротора | 1990 |
|
SU1744313A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2215357C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2015 |
|
RU2589718C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1992 |
|
RU2050673C1 |
| ПОДШИПНИК СИСТЕМЫ ЭНЕРГОНЕЗАВИСИМОГО АКТИВНОГО МАГНИТНОГО ПОДВЕСА РОТОРА | 2003 |
|
RU2246644C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2008 |
|
RU2375736C1 |
Изобретение относится к машиностроению, а именно к системам магнитного подвеса (СМП) роторных машин, и может найти применение в компрессорах, турбодетандерах и других установках. Способ формирования сигнала отклонения ротора в системах магнитного подвеса роторной машины с управлением тока посредством широтно-импульсной модуляции (ШИМ-управлением) в электромагните заключается в подаче сигналов ШИМ-управления на вход усилителя 1 мощности. С выхода усилителя 1 сигналы в виде напряжений многоугольной формы подают на электромагнит 3. Одновременно осуществляется подача сигналов тока на преобразователь 2 тока электромагнита 3 с последующим выделением переменной составляющей тока пилообразной формы. Далее ее преобразуют в сигнал, пропорциональный крутизне пилообразного сигнала тока в интервале коммутации сигнала ШИМ-управления, и последующего его преобразования в сигнал отклонения ротора. Изобретение направлено на упрощение схемы "самоконтроля" и создание более простого устройства бездатчикового магнитного подвеса, которое позволит упростить конструкцию опор роторной машины и повысить помехозащищенность СМП. 3 н. и 8 з.п. ф-лы, 6 ил.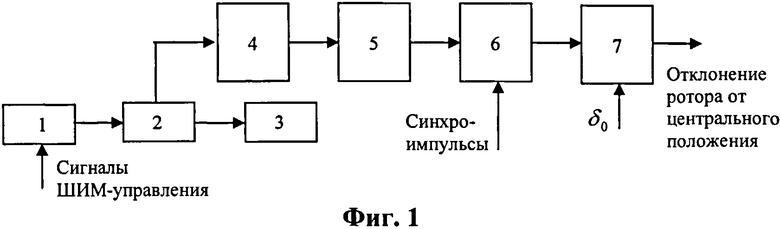
1. Способ формирования сигнала отклонения ротора в системах магнитного подвеса роторной машины с управлением тока посредством широтно-импульсной модуляции (ШИМ-управлением) в электромагните, заключающийся в подаче сигналов ШИМ-управления на вход усилителя мощности, с выхода которого сигналы в виде напряжений многоугольной формы подают на электромагнит, и одновременной подачи сигналов тока на преобразователь тока электромагнита с последующим выделением переменной составляющей тока пилообразной формы, преобразования ее в сигнал, пропорциональный крутизне пилообразного сигнала тока в интервале коммутации сигнала ШИМ-управления, и последующего его преобразования в сигнал отклонения ротора.
2. Устройство формирования сигнала отклонения ротора в системе магнитного подвеса (СМП) роторной машины, содержащее один или два идентичных контура формирования сигнала и блок сравнения, контур содержит усилитель мощности с ШИМ-управлением, выход которого соединен с электромагнитом СМП, преобразователь тока электромагнита, с которым последовательно соединены фильтр подавления коммутационных помех, дифференцирующий блок и блок выборки-хранения, другой вход которого предназначен для подачи синхроимпульсов, согласованных с частотой коммутации сигнала ШИМ-управления, а выход блока выборки-хранения соединен с входом блока сравнения, выход которого является выходом устройства.
3. Устройство по п.2, отличающееся тем, что преобразователь тока электромагнита содержит трансформатор тока, первичная обмотка которого включена в цепь обмотки электромагнита СМП, вторичная обмотка с параллельно включенным шунтом соединена с входом фильтра подавления коммутационных помех.
4. Устройство по п.2, отличающееся тем, что преобразователь тока электромагнита содержит датчик тока на основе эффекта Холла, включенный в цепь электромагнита, и соединенный с указанным датчиком блок выделения переменной составляющей тока, выход которого соединен с входом фильтра подавления коммутационных помех.
5. Устройство по п.2, отличающееся тем, что преобразователь тока электромагнита содержит датчик тока на основе резистора, включенного в цепь электромагнита, включенный параллельно ему измерительный усилитель с оптоэлектронной развязкой и соединенный с указанным усилителем блока выделения переменной составляющей тока, выход которого соединен с входом фильтра подавления коммутационных помех.
6. Устройство по п.2, отличающееся тем, что при наличии одного электромагнита устройство содержит один контур формирования сигналов, а второй вход блока сравнения предназначен для подачи сигнала, соответствующего центральному положению ротора.
7. Устройство по п.2, отличающееся тем, что при наличии двух электромагнитов устройство содержит два контура формирования сигналов в одном канале управления СМП, а выходы блоков выборки-хранения контуров соединены соответственно с первым и вторым входами блока сравнения.
8. Устройство формирования сигнала отклонения ротора в системе магнитного подвеса (СМП) роторной машины, содержащее два усилителя мощности с ШИМ-управлением, выход каждого из которых соединен с соответствующим электромагнитом СМП, два преобразователя тока электромагнита, каждый из которых включен в цепь соответствующего электромагнита СМП, а выходы которых соединены в противофазе с блоком сравнения, с которым последовательно соединены фильтр подавления коммутационных помех, дифференцирующий блок и блок выборки-хранения, другой вход которого предназначен для подачи синхроимпульсов, а выход которого является выходом устройства.
9. Устройство по п.8, отличающееся тем, что преобразователь тока электромагнита содержит трансформатор тока, первичная обмотка которого включена в цепь обмотки электромагнита СМП, вторичная обмотка с параллельно включенным шунтом соединена с входом блока сравнения.
10. Устройство по п.8, отличающееся тем, что преобразователь тока электромагнита содержит датчик тока на основе эффекта Холла, включенный в цепь электромагнита, и соединенный с указанным датчиком блок выделения переменной составляющей тока, выход которого соединен с входом блока сравнения.
11. Устройство по п.8, отличающееся тем, что преобразователь тока электромагнита содержит датчик тока на основе резистора, включенного в цепь электромагнита, включенный параллельно ему измерительный усилитель с оптоэлектронной развязкой и соединенный с указанным усилителем блока выделения переменной составляющей тока, выход которого соединен с входом блока сравнения.
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 1999 |
|
RU2181922C2 |
| Механизм с магнитным подвесом ротора | 1988 |
|
SU1569932A1 |
| Устройство для стабилизации магнитного подвеса ротора | 1990 |
|
SU1744313A1 |
| WO 9426022 A1, 10.11.1994 | |||
| US 5953491 A, 14.09.1999. | |||

