Изобретение относится к деревообрабатывающему оборудованию и предназначено для передачи и ориентирования предметов в форме куба или параллелепипеда, имеющих грани разной степени шероховатости, например деревянные кубики.
Известны транспортные устройства, содержащие подающий и приемный конвейеры, стол и ориентатор.
Недостатком данных устройств является низкая производительность.
Наиболее близким к предлагаемому является транспортное устройство, содержащее подающий и приемный конвейеры, наклонный желоб, стол, манипулятор, ориентатор, фотодатчики, блок управления.
Недостатком известного устройства является низкая производительность.
Цель изобретения - повышение производительности путем увеличения скорости ориентирования.
Стол расположен между подающим и приемным конвейерами, наклонный желоб выполнен в виде угольника, установлен после приемного конвейера, манипулятор установлен над столом в месте его соединения с приемным конвейером, ориентатор расположен под поверхностями желоба перед ориентатором, фотодатчик прохождения предметов над поверхностью желоба после ориентатора.
Предлагаемое устройство отличается от известного тем, что стол расположен между подающим и приемным конвейерами, наклонный желоб выполнен в виде угольника, установлен после приемного конвейера, манипулятор установлен над столом в месте его соединения с приемным конвейером, ориентатор расположен под поверхностью желоба, фотодатчики ориентации расположены под поверхностью желоба перед ори- ентаторами, фотодатчик прохождения предметов над поверхностью желоба после ориентатора.
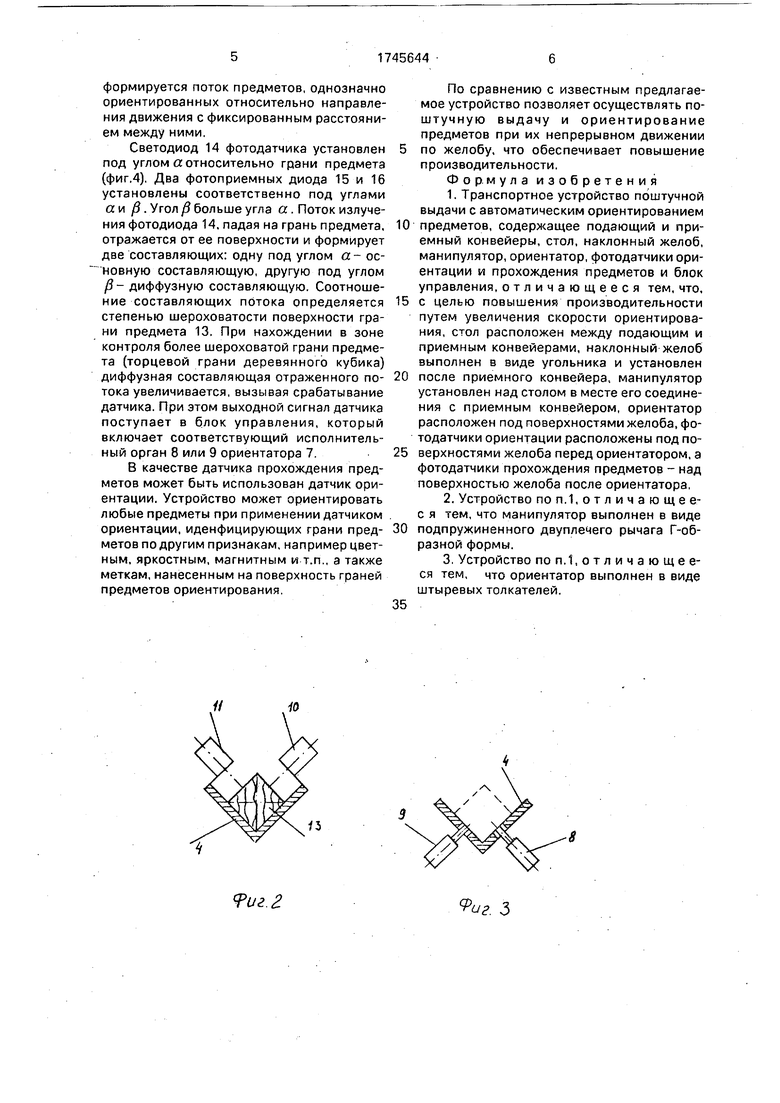
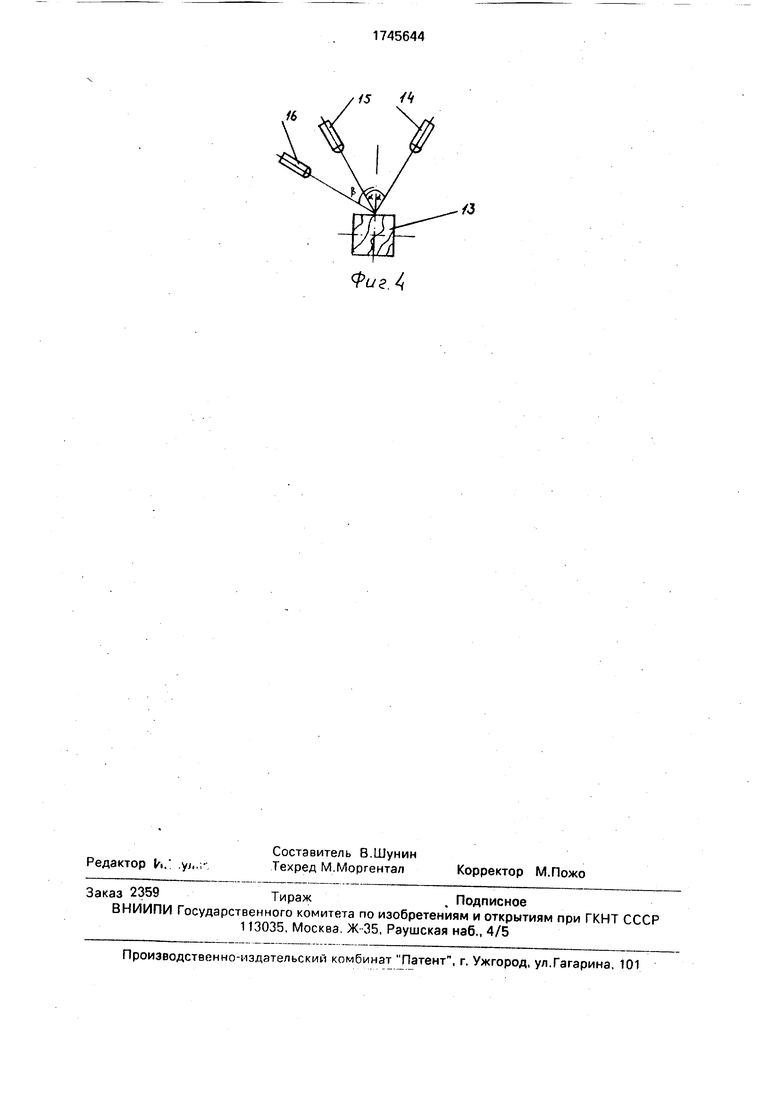
На фиг. 1 изображено транспортное устройство поштучной выдачи с автоматическим ориентированием предметов; на фиг 2 - схема расположения датчиков ориентирования; на фиг.З - расположение ориентзто- ра, на фиг,4 - схема принципа работы фотодатчика ориентации.
Транспортное сфойство поштучной выдачи с автомгп.Чсч ким ориентированием содержит пода, щий 1 и приемный 2 конвейеры, стол 3, желоб 4 манипулятор 5 с органом 6 управления, ориентатор 7 с исполнительными органами 8 и 9, фотодатчики 10 и 11 ориентации фотодатчик 12 прохождения предметов блок управления Манипулятор 5 выполнен в виде подпружиненного рычага Г-образной формы, ориентатор 7 - в виде штыревых толкателей, расположенных над поверхностью желоба, Устройство работает следующим образом.
В исходном положении манипулятор 5 находится в положении, показанном на фиг,1, ориентатор утоплен в корпусе желоба. Предметы 13 ориентирования непрерыв0 ным потоком поступают на подающий конвейер 1 с произвольной ориентацией продольных и поперечных граней относительно направления движения.
Непрерывный поток предметов доходит
5 до манипулятора 5 и останавливается таким образом, что на столе 3 находятся два предмета. Причем второй предмет постоянно подпирается потоком предметов с подающего конвейера 1. Первый предмет частич0 но контактирует с приемным конвейером 2 При срабатывании органа 6 управления манипулятора 5 по сигналу с блока управления правый конец манипулятора 5 поднимается и пропускает первый предмет 13 на прием5 ный конвейер 2. Левый подпружиненный конец манипулятора 5 прижимает второй предмет, создавая тем самым фиксированный постоянный зазор между первым предметом, поступившим на конвейер 2
0 Первый предмет с приемного конвейера 2 поступает на наклонный желоб 4 и скользит под действием силы гравитационного поля и силы трения. При его прохождении через зону расположения фотодатчиков
5 10 и 11 ориентации происходит определение расположения поверхностей относительно направления движения предметов на наклонной плоскости желоба 4. Сигналы с датчиков обрабатываются блоком управ0 ления. В результате обработки сигналов датчиков блок управления выдает сигналы на исполнительные органы 8 и 9 ориентатора 7. При этом срабатывает тот исполнительный орган, относительно которого
5 происходит поворот предмета
Ориентатор 7 входит в зону движения предмета перед его приходом в желобе 4 и, взаимодействуя с ребром предмета, осуществляет поворот его на 90° относительно
0 толкателя, однозначно ориентируя предмет по направлению движения потока предметов. Ориентированный предмет, проходящий через зону установления фотодатчика 12 прохождения предметов, вызывает его
5 срабатывание. Блок управления, принимая сигнал с фотодатчика 12, вызывает срабатывание органа 6 управления манипулятора 5, пропуская очередной предмет на приемный конвейер 3. Далее процесс повторяется в той же последовательности В результате
формируется поток предметов, однозначно ориентированных относительно направления движения с фиксированным расстоянием между ними.
Светодиод 14 фотодатчика установлен под углом «относительно грани предмета (фиг.4). Два фотоприемных диода 15 и 16 установлены соответственно под углами а и р. Угол ft больше угла а. Поток излучения фотодиода 14, падая на грань предмета. отражается от ее поверхности и формирует две составляющих: одну под углом а- основную составляющую, другую под углом диффузную составляющую. Соотношение составляющих потока определяется степенью шероховатости поверхности грани предмета 13. При нахождении в зоне контроля более шероховатой грани предмета (торцевой грани деревянного кубика) диффузная составляющая отраженного по- тока увеличивается, вызывая срабатывание датчика. При этом выходной сигнал датчика поступает в блок управления, который включает соответствующий исполнительный орган 8 или 9 ориентатора 7.
В качестве датчика прохождения предметов может быть использован датчик ориентации. Устройство может ориентировать любые предметы при применении датчиком ориентации, иденфицирующих грани пред- метов по другим признакам, например цветным, яркостным, магнитным и т.п., а также меткам, нанесенным на поверхность граней предметов ориентирования
По сравнению с известным предлагаемое устройство позволяет осуществлять поштучную выдачу и ориентирование предметов при их непрерывном движении по желобу, что обеспечивает повышение производительности.
Формула изобретения
1.Транспортное устройство поштучной выдачи с автоматическим ориентированием предметов, содержащее подающий и приемный конвейеры, стол, наклонный желоб, манипулятор, ориентатор, фотодатчики ориентации и прохождения предметов и блок управления, отличающееся тем, что, с целью повышения производительности путем увеличения скорости ориентирования, стол расположен между подающим и приемным конвейерами, наклонный желоб выполнен в виде угольника и установлен после приемного конвейера, манипулятор установлен над столом в месте его соединения с приемным конвейером, ориентатор расположен под поверхностями желоба, фотодатчики ориентации расположены под поверхностями желоба перед ориентатором, а фотодатчики прохождения предметов - над поверхностью желоба после ориентатора,
2.Устройство поп.1,отличающее- с я тем, что манипулятор выполнен в виде подпружиненного двуплечего рычага Г-об- разной формы.
3.Устройство поп.1,отличающее- ся тем, что ориентатор выполнен в виде штыревых толкателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической ориентации предметов | 1987 |
|
SU1452769A1 |
| Устройство для загрузки изделий, преимущественно оснований корпусов интегральных схем, в кассеты | 1989 |
|
SU1762431A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ РЫБЫ В РЫБООБРАБАТЫВАЮЩИЕ МАШИНЫ | 2017 |
|
RU2649340C1 |
| Устройство для ориентации и поштучной выдачи изделий | 1978 |
|
SU747785A1 |
| Загрузочный ротор | 1991 |
|
SU1816642A1 |
| Установка для насадки катушек ровницы на носитель | 1991 |
|
SU1802011A1 |
| УСТРОЙСТВО для РАЗБОРА КРУГЛОГО И КВАДРАТНОГО ПРОКАТА ИЗ ПАЧКИ | 1968 |
|
SU210795A1 |
| Устройство для набора контактов в изоляторы электрических разъемов | 1988 |
|
SU1552277A1 |
| Установка для непрерывного деформирования изделий | 1988 |
|
SU1606218A1 |
| Устройство ориентирования цилиндри-чЕСКиХ издЕлий | 1979 |
|
SU837919A1 |
Транспортное устройство поштучной выдачи с автоматическим ориентированием предназначено для поштучной передачи и ориентирования предметов в форме куба или параллелепипеда. Цель - повышение производительности путем увеличения скорости ориентирования. Устройство содержит подающий 1 и приемный 2 конвейеры, стол 3 между ними, манипулятор 5, наклонный желоб 4, ориентатор7и фотодатчики 10 и 11 ориентации и 12 прохождения предметов. Наклонный желоб 4 выполнен в виде угольника, установлен после приемного конвейера 2, манипулятор 5 установлен в месте стыка конвейера 1 со столом 3. ориен- татор 7 расположен под поверхностями желоба, фотодатчики расположены под поверхностями желоба перед ориентато- ром, а фотодатчики прохождения предметов - над поверхностью желоба после ориента- тора. 2 з.п.ф-лы, 4 ил. 4j Ё 11 / /г Ј О Фш. /
Фиг 2
Фиг 3
«
/5 /4
Фиг. 4
| Устройство для определения середины изделия и установки его на заданную позицию | 1987 |
|
SU1463658A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для автоматической ориентации предметов | 1987 |
|
SU1452769A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
