Изобретение относится к машиностроению и приборостроению и может быть использовано в различных областях техники, в частности о механических системах приборов, там, где необходимо иметь стабильную характеристику пружин.
Известны устройства для фиксации пружин с неизменяемой и регулируемой жесткостью, которые содержат цилиндрическую винтовую пружину и резьбовые втулки, у которых фиксация пружины осуществляется навинчиванием (ввинчиванием) нерабочих витков пружины на резьбовую (в резьбовую) зтулку.
Недостатками приведенных устройств являются неоднозначность фиксации витков пружин на выходе (входе) из резьбовых втулок, нестабильность и нелинейность упругой характеристики (зависимость жесткости от деформации) пружин в пределах рабочего хода, так как при воздействии на пружину рабочим усилием Р витки пружины сжимаются (или растягиваются) и при этом крайние рабочие витки садятся на торцы резьоовых втулок или отходят от торцов резьбовых втулок (уменьшается, увеличивается количество рабочих витков), и, как следствие, возникает неоднозначность упругой характеристики пружин при разных рабочих усилиях.
Наиболее близким к предлагаемому является пружинное устройство, содержащее резьбовую втулку и резьбовую пробку, между которыми размещены витки пружины. На торцовых поверхностях втулки и пробки выполнены сопряженные скосы под углом, равным углу наклона витков пружины.
Однако при перемещении витков пружины (под воздействием силы Р) данное пружинное устройство не обеспечивает стабильной характеристики пружины (жесткость) во всем диапазоне рабочей деформации, так как наличие скосов на торцах втулки и пробки исключает потери на трение только при малых амплитудах колебаний пружины, В частности, не указана величина уступа, которая необходима дпя достижения равномерного зазорз между торцом втулки и крайним витком пружины во всем диапазоне рабочего хода пружины и не дана номинальная ширина перемычки, при которой касание крайнего витка пружины торца втулки и пробки невозможно и при максимальной рабочей деформации пружины. Таким образом, когда пружина находится при определенных рабочих условиях (рабочее усилие Р, действующее на пружину, не меняется), жесткость пружина одна. а при изменении этих условий (например, рабочее усилие Р, действующее на пружину, увеличилось) жесткость пружины увеличится так как часть крайнего витка будет касаться торца втулки (из работы выключается часть рабочего витка пружины), а это
влечет за собой нестабильность и нелинейность упругой характеристики пружины.
Целью изобретения является получение стабильной упругой характеристики пружины во всем диапазоне рабочей деформации.
0 Поставленная цель достигается тем, что в устройстве для фиксации нерабочих витков винтовой цилиндрической пружины, содержащем пружину и резьбовые втулки, на торцовых поверхностях которых имеются
5 скосы, выполненные под углом, равным углу наклона витка пружины и перемычки, скосы на торцах резьбовых втулок со стороны входа (выхода) пружины выполнены в виде винтовой поверхности с углом подъема, равным
0 углу подъема витка пружины с образованием уступа на торце втулки, высота которого равна шагу пружины, а ширима перемычки выбрана равной 0,1-0,2 диаметра проволоки пружины.
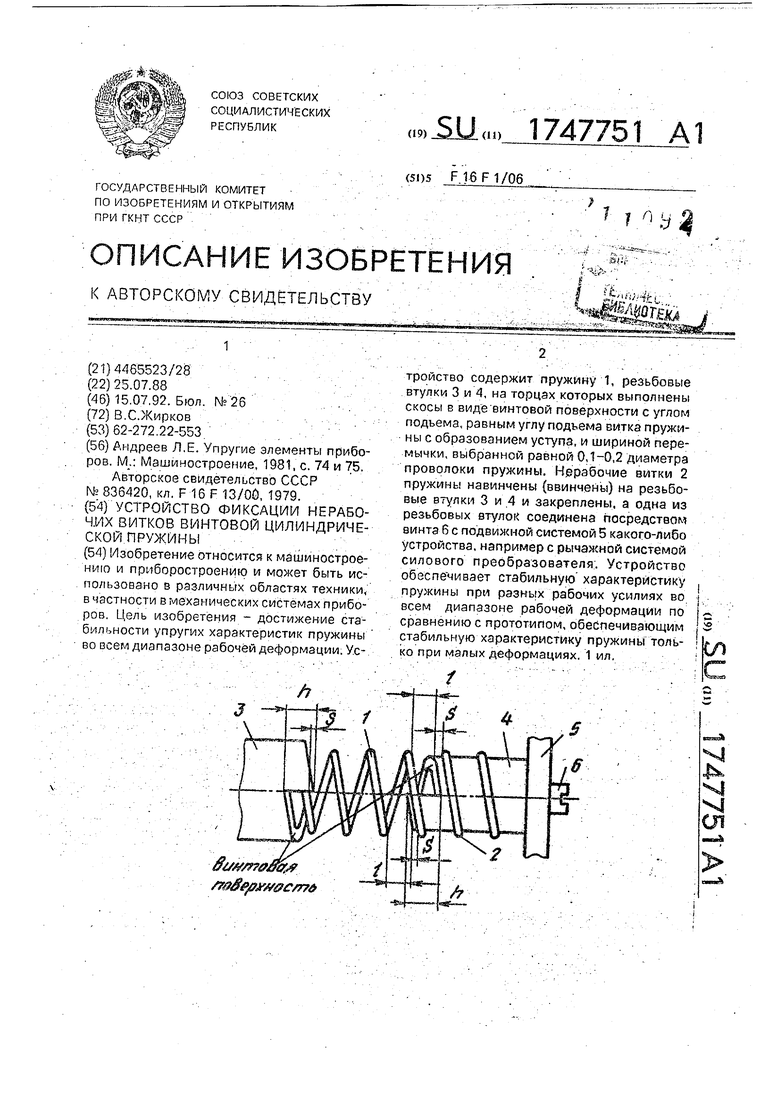
5 На чертеже представлена принципиальная схема предлагаемого устройства
Цилиндрическая винтовая пружина содержит рабочие 1 и нерабочие 2 витки. Нерабочие витки 2 пружины одним концом
0 ввинчены в резьбовую втулку 3, на внутренней поверхности которой имеется резьба с шагом, равным шагу пружины и высотой профиля резьбы не менее половины диаметра проволоки
5 Нерабочие витки второго конца пружины навинчены на резьбовую втулку А и могут быть жестко закреплены, например, заливкой компаундом. Резьбовая втулка 4 посредством винта б соединена с подвижной
0 системой 5 какого-либо устройства, например, с рычажчой системой преобразователя,
Высота уступа (см. чертеж), равная шагу пружины, является обязательным условием
5 для получения на всей длине окружности торца втулки скоса, выполненного в виде винтовой поверхности, что обеспечивает достижение равномерного зазора между торцом втулки и крайним витком пружины
0 по всей длине окружности этого витка. Только при выполнении на всей длине окружности торца втулки скоса, выполненного в виде винтовой поверхности с углом подъема, равным углу подъема витка пружины,
5 удается достичь равномерного зазора между торцом втулки и крайним витком пружины на всей длине окружности этого витка. При выполнении внсоты уступа меньше шага пружины получить полную винтовую по- верхность с углом подъема, равным углу
подъема витка пружины на всей длине окружности горца втулки, невозможно, так как часть этой винтовой поверхности выйдет за пределы втулки, а значит, торец втулки в какой-то своей части не будет иметь винтовую поверхность, что приведет к неравномерному зазору между витком пружины и торцом втулки и, как следствие, из этого при перемещении витков пружины крайний виток будет касаться торца втулки, что приведет к изменению характеристики (жесткости) пружины.
Для обоснования выбора ширины перемычки S, равной 0,1-0,2 диаметра проволоки пружины, рассмотрим на конкретном примере геометрию пружины, в частности, интересующий размер между двумя соседними рабочими витками при максимальном рабочем нагружении пружины, а значит, и при максимальном рабочем перемещении витков пружины, В дальнейшем определим размер между последним рабочим витком пружины и торцом втулки, так как исходя из этого размера и выбрана оптимальная ширина перемычки S на резьбовой втулке, при выполнении которой пружина получает стабильную характеристику при различных рабочих деформациях. Методика определения размеров пружины распространяется на пружины, не требующие индивидуальных методов конструирования,
Исходными величинами для определения геометрии пружины являются сила пружины при предварительной деформации Рь сила пружины при рабочей деформации Р2, рабочий ход Н, и наружный диаметр пружины D (предварительный). Все расчеты производятся на основании известных формул по расчету пружин из справочников или ГОСТ 13764-86-ГОСТ 13769-86, Пружины винтовые цилиндрические сжатия и растяжения из проволоки круглого сечения.
Пример. Дано: Р 0,6 кгс: Р2 6 кгс; Н 20 мм; D 8-10 мм. Пользуясь интервалом значений д , находим граничные значения силы
2 б6
РЗ
б.ЗЗ - 8,0 кгс
1 -О 1 -0,05 1 -0,25
где РЗ - сила пружины при максимальной деформации;
б - относительный инерционный зазор пружины сжатия,
Р2
д 1Н
Для пружин сжатия д - 0,05-0,25.
Находим по рекомендуемым таблицам виток со следующими параметрами: РЗ 8 кгс; d 1.6 мм; D 11,0 мм; zi 7,59 кгс/мм, где d - диаметр проволоки; zi - жесткость одного витка.
Опуская промежуточные расчеты, находим жесткость пружины Р2 -Pi 6
Н
z
20
.27кгс/мм.
Находим число рабочих витков пружины п -21 7.59 9Я
При полутора нерабочих витках находим полное число витков пружины щ п + П2 28+ 1.5 29,5. Находим деформации пружины
15
0
5
0
5
0
5
0
5
0,26мм
Возможная деформация пружины в нерабочей зоне составляет
FO РЗ - F2 29,6 - 22,4 7,4 мм ,
Зазор между двумя соседними витками составит
з FO 7,4
Отсюда можно сделать вывод, что для получения стабильной характеристики пружины, даже при максимальной рабочей деформации, ширина перемычки S не должна превышать размера между двумя соседними витками, равного 0,26 мм, находящегося в зоне нерабочих деформаций пружины и полученного в результате воздействия на пружину максимального рабочего усилия.
Ширина перемычки S в предлагаемом устройстве выбирается в интервале 0,1-0,2 диаметра проволоки пружины и при диаметре проволоки 1,6 мм составляет 0,16-0,32 мм.
Выполнив перемычку S шириной, равной 0,25 мм, обеспечим условие, при котором крайний виток пружины не будет касаться торца втулки даже при максимапь- ной рабочей деформации, что и необходимо для получения стабильной характеристики пружины, так как жесткость пружины остается постоянной и из работы не выключаются рабочие витки пружины,
В случае выполнения перемычки S, равной 0,27 мм и более, при максимальной рабочей деформации крайний рабочий виток касается торца втулки и из работы как бы выключается часть витка пружины. При этом изменяется жесткость, т.е. работа пружины будет ограничена с увеличением нагрузки при требуемом условии сохранения стабильной характеристики.
Таким образом, выбранный оптимальный интервал ширины перемычки S, равный 0,1-0,2 диаметра проволоки пружины, и выполнение уступа h, равного шагу пружины с учетом возможных допусков на материал и (еометрические размеры самой пружины, обеспечивает стабильную характеристику пружины.
Формула изобретения Устройство фиксации нерабочих витков винтовой цилиндрической пружины, содер0
жащее резьбовые втулки со скосами пол углом, равным углу подъема витка пружины, и перемычкой, отличающееся тем, что, с целью повышения упругих свойств, скосы выполнены в виде винтовой поверхности с образованием уступа, высота последнего равна шагу пружины, а ширина перемычки выбрана равной 0,1-0,2 диаметра проволоки пружины. -
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЗЬБОВОЕ СОЕДИНЕНИЕ СЕКЦИЙ БУРОВОЙ КОЛОННЫ | 2021 |
|
RU2761054C1 |
| ЧЕРВЯЧНЫЙ ИНСТРУМЕНТ, СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ, ОБОРУДОВАНИЕ ДЛЯ ЕГО ИЗГОТОВЛЕНИЯ И ЭКСПЛУАТАЦИИ | 1998 |
|
RU2169061C2 |
| УСТРОЙСТВО ДЛЯ УПРОЧНЕНИЯ РЕЗЬБЫ | 2007 |
|
RU2347660C1 |
| ВИНТОВАЯ ПАРА ОБЖИМНОГО ПРОКАТНОГО СТАНА | 2001 |
|
RU2198045C1 |
| Оправка для пилигримовой прокатки труб | 1988 |
|
SU1553226A1 |
| Шагозадающее устройство к пружинонавивочному автомату | 1985 |
|
SU1301538A1 |
| СПОСОБ УПРОЧНЕНИЯ КРУПНЫХ РЕЗЬБ | 2007 |
|
RU2355552C1 |
| Модуль резонансного манипулятора | 1985 |
|
SU1298069A1 |
| КАЛИБР РЕЗЬБОВОЙ ДЛЯ КОНТРОЛЯ НАРУЖНЫХ РЕЗЬБ | 1999 |
|
RU2174211C2 |
| Соединение рельсового скрепления с основанием рельсового пути | 2021 |
|
RU2767115C1 |
| Андреев Л,Е | |||
| Упругие элементы приборов | |||
| Машиностроение, 1981, с | |||
| Приспособление в центрифугах для регулирования количества жидкости или газа, оставляемых в обрабатываемом в формах материале, в особенности при пробеливании рафинада | 0 |
|
SU74A1 |
| Пружинное устройство | 1979 |
|
SU836420A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
