Изобретение относится к машиностроению, в частности к предохранительным устройствам грузоподъемных механизмов.
Известен безударный храповой механизм, содержащий храповое колесо, направляющую, ползун с пальцем и собачкой для взаимодействия с храповым колесом, предварительно закрученную пружину, связанную с кулачком.
Известен храповой механизм с двумя храповыми колесами, включающий храповые колеса, зубья которых сдвинуты относи- тельно друг друга на половину шага зацепления, собачку, попеременно входящую в зацепление с зубчатыми колесами,
Недостаток известных механизмов заключается в том, что вывод и ввод собачек в зацепление с зубчатыми колесами производится вручную, что затрудняет дистанционное управление этими процессами и требует дополнительных трудозатрат.
Целью изобретения является повышение удобства эксплуатации путем обеспечения дистанционного управления храповым стопором.
Указанная цель достигается тем, что в двустороннем храповом стопоре, содержащем ось, закрепленные на ней два храповых колеса, зубья одного из которых Сдвинуты относительно зубьев другого на половину шага зацепления, собачку, предназначенную для периодического взаимодействия с одним из храповых колес, направляющую и ползун, последние выполнены в виде расположенных аксиально полых призм, установленных между храповыми колесами, а стопор снабжен расположенными на концах ползуна эластичными элементами с пря- моугольными продольными вырезами, предназначенными для взаимодействия с гранями направляющей, жестко связанными с соответствующими торцами направляющей двумя кронштейнами, стойкой, одним концом жестко связанной с ползуном, двумя электромагнитами, катушки которых установлены на соответствующих крон(Л
V™,
штейнах, а сердечники - на стойке двуплечим рычагом с двумя упорами на соответствующих плечах, закрепленным на другом конце стойки, и дополнительной собачкой, предназначенной для периодического взаимодействия с другим храповым колесом, а основная и дополнительная собачки размещены на соответствующих концах двуплечего рычага с возможностью вращения и подпружинены к соответствующим упорам
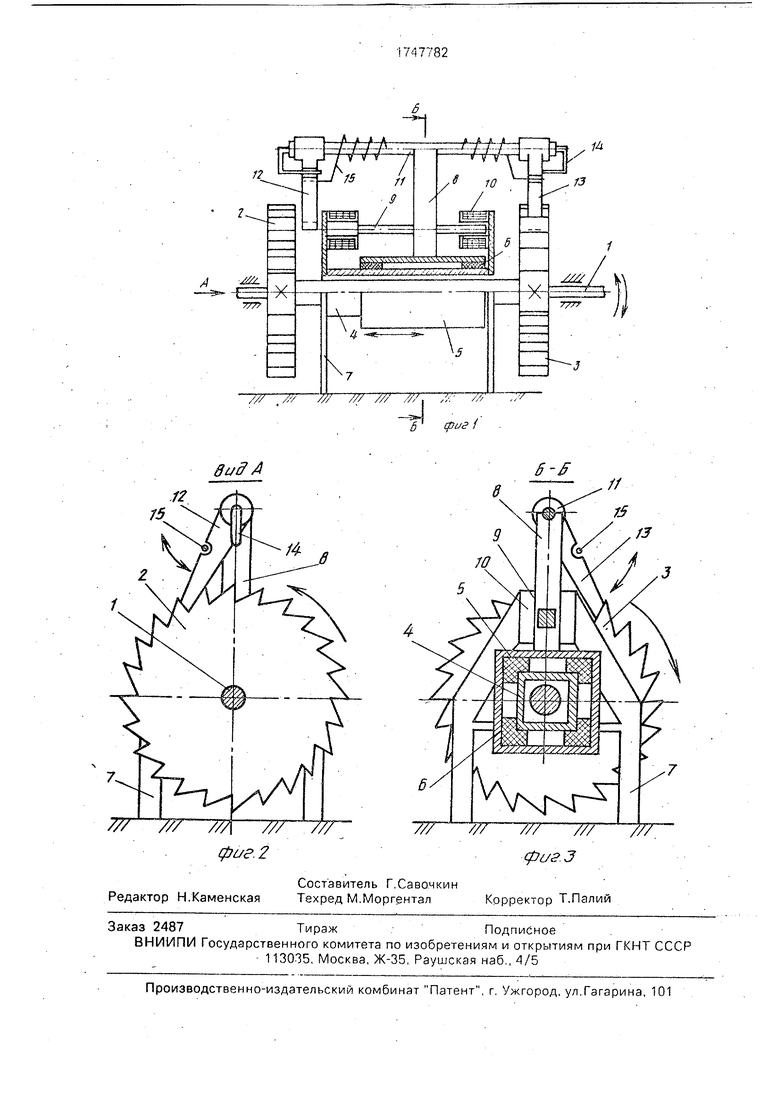
На фиг 1 изображен двусторонний храповой стопор; на фиг 2 - вид А на фиг.1; на фиг 3 - разрез Б-Б на фиг.1.
Двусторонний храповой стопор состоит из жестко закрепленных на оси 1 храповых колес 2 и 3 с разносторонним направлением зубьев, сдаинутых относительно друг друга на половину шага зацепления.
Направляющая 4 и ползун 5 выполнены в виде расположенных аксиально полых призм, установленных на оси 1, между храповыми колесами 2 и 3.
На концах ползуна 5 расположены эластичные элементы 6 с прямоугольными продольными вырезами, взаимодействующие скольжением с гранями направляющей 4, которая торцами жестко связана с кронштейнами 7.
К ползуну 5 концом жестко закреплена стойка 8, а к ней - перпендикулярно сердечники 9 электромагнитов,сориентированные в полости катушек 10, жестко прикрепленных к кронштейнам 7.
На конце стойки 8 закреплен двуплечий рычаг 11, на концах которого размещены основная 12 и дополнительная 13 собачки, а к торцам прикреплены упоры 14, ограничивающие односторонний угловой поворот собачек 12 и 13, подпружиненные предварительно закрученным упругим элементом 15
В зависимости от необходимого направления вращения исполнительного механизма собачки основную 12 или дополнительную 13 - вводят в зацепление в соответствующие храповые колеса 2 и 3 путем подачи напряжения на соответствующую катушку 10, подключенную параллельно к соответствующей катушке магнитного пускателя привода грузоподъемного механизма и вводом в полость катушки 10 соответствующего сердечника 9
При этом ползун 5, увлекаемый сердечником 9, скользит эластичными элементами 6 по направляющей 4, перемещаясь в заданном направлении
Упоры 14 позволяют беспрепятственно вводить собачки 12 и 13 с зацепление без корректировки его положения
Формула изобретения
Двусторонний храповой стопор, содержащий ось, закрепленные на ней два храповых колеса, зубья одного из которых сдвинуты относительно зубьев другого на половину шага зацепления, собачку, предназначенную для периодического взаимодействия с одним из храповых колес, направляющую и ползун, отличающий- с я тем, что, с целью повышения удобства эксплуатации, направляющая и ползун выполнены в виде расположенных аксиально полых призм, установленных между храповыми колесами, а стопор снабжен расположенными на концах ползуна эластичными элементами с прямоугольными продольныии вырезами, предназначенными для взаимодействия с гранями направляющей, жестко связанными с соответствующими торцами направляющей двумя кронштейнами, стойкой, одним концом жестко связанной с ползуном, двумя электромагнитами, катушки которых установлены на соответствующих кронштейнах, а сердечники - на стойке, двуплечим рычагом с двумя упорами на соответствующих плечах, закрепленным
на другом конце стойки, и дополнительной собачкой, предназначенной для периодического взаимодействия с другим храповым колесом, а основная и дополнительная собачки размещены на соответствующих концах двуплечего рычага с возможностью вращения и подпружинены к соответствующим упорам.
кда/
15//
-
/
.JL-. А Л
ТТ
ГТТГ Я7
ЈЕ
х
/5
/4
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик линейных перемещений | 1991 |
|
SU1820196A1 |
| Прибор для измерения кривизны буровых скважин | 1975 |
|
SU699164A1 |
| Каретка кривовязюка к устройству дляВыРубКи зАгОТОВОК из пОлОСОВОгОМАТЕРиАлА | 1979 |
|
SU841732A1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ БЕТОННЫХ ИЗДЕЛИЙ | 2009 |
|
RU2405672C1 |
| Предохранительное устройство для круглопильного станка | 1981 |
|
SU1046091A2 |
| Автоматический ключ для свинчивания и развинчивания насосных штанг | 1986 |
|
SU1350325A1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU946733A1 |
| ФОТОГРАФИЧЕСКИЙ АППАРАТ | 1972 |
|
SU340213A1 |
| Пресс для вырубки изделий излиСТОВОгО и лЕНТОчНОгО МАТЕРиАлА | 1978 |
|
SU795648A1 |
| Устройство для самостоятельной перегрузки инвалида | 1991 |
|
SU1819596A1 |
Изобретение относится к машиностроению, в частности к предохранительным устройствам грузоподъемных механизмов. Целью изобретения является повышение удобства эксплуатации путем обеспечения дистанционного управления храповым стопором. На стойке 8 закреплены сердечники 9, а на кронштейнах 7 - катушки 10 электромагнитов. Стойка 8 связана двуплечим рычагом 11 с собачками 12 и 13, которые при поочередном включении электромагнитов входят в зацепление с соответствующими храповыми колесами 2 и 3. 3 ил.
4 -дг:- эв7
ТУ %
Buff A
12
15
в
/// /// 7/Л /// 777
фиг 2фиг з
Составитель Г.Савочкин
Редактор Н,Каменская
Техред М.Моргентал
Заказ 2487ТиражПодписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб , 4/5
ш;
а
7Г
б-Ј
0
Корректор Т.Палий
| Безударный храповой механизм | 1986 |
|
SU1355812A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Артоболевский И.И | |||
| Механизмы в современной технике, - М.: Наука, 1980, том IV, с | |||
| Ручной ткацкий станок | 1922 |
|
SU339A1 |
