Изобретение относится к области механизированной сборки ответственных резьбовых соединений с применением редкоударных гайковертов и может быть использовано в различных отраслях машиностроения.
Известен способ сборки резьбовых соединений, заключающийся в предварительном навертывании и затяжке гайки до получения в резьбовом соединении начального усилия, обеспечивающего получение нулевой точки отсчета и окончательной до- затяжке соединения определенным числом ударов,
Наиболее близким по технической сущности к изобретению является способ затяжки резьбовых соединений, заключающийся в обжатии стыка и затяжке ударами, замере текущего угла поворота гайки и момента на ней по завершении обжатия стыка после трех последовательных ударов, определении коэффициента динамичности приращения угла поворота гайки и приведенной жесткости резьбового соединения, нахождении числа дополнительных ударов и окончании затяжки после их нанесения.
Онако точность известного способа недостаточна для особо ответственных резьбовых соединений ввиду того, что суммарное число ударов определяется исходя из требуемого момента затяжки резьбового соединения. Известно, что при контроле усилия по моменту затяжки обеспечивается точность не более ±25%, что объясняется разбросом значений коэффициентов трения на торце гайки и в особенности в резьбе.
Цель изобретения - повышение надежности резьбовых соединений за счет уменьшения погрешности достижения заданного усилия затяжки
Указанная цель достигается за счет того, что согласно способу затяжки резьбовых соединений, заключающемуся в обжатии
VI Јь О
О
„а
со
стыка и затяжке ударами, замере текущего угла поворота гайки и момента на ней по завершении обжатия стыка после трех последовательных ударов, определения коэффициента динамичности приращения угла поворота гайки и приведенной жесткости резьбового соединения, нахождении числа дополнительных ударов и окончании затяжки после их нанесения, задают расчетный угол поворота гайки, а число дополнительных ударов определяют из выражения
ОсЈ+з-1)+2рп+з32
Пдоп5Г
4рп +3 (рп +3 1)
где Op - расчетный угол поворота гайки;
К - приведенная жесткость резьбового соединения;
Мп+з момент затяжки на гайке после последнего из трех последовательно нанесенных ударов;
РП 4-3 коэффициент динамичности приращения угла поворота гайки после последнего из трех последовательно нанесенных ударов;
п - количество нанесенных при обжатии стыка ударов.
На фиг.1 изображена принципиальная блок-схема устройства для реализации способа; на фиг.2 - графики зависимостей усилия и момента затяжки от угла поворота гайки для упрощенной (идеализированной) модели и реального резьбового соединения; на фиг.З - график зависимости момента затяжки от угла поворота гайки и выполненная после каждого удара работа для упрощенной (идеализированной) модели резьбового соединения.
Устройство для реализации способа содержит редкоударный гайковерт 1, датчик 2 угла поворота гайки, датчик 3 момента на гайке, механизм 4 включения - выключения гайковерта 1, микропроцессор 5 и блок 6 интерфейсов (устройство согласования датчиков 2 и 3 и механизма 4 с микропроцессором 5).
Для объяснения сущности способа затяжки резьбовых соединений редкоударны- ми гайковертами рассмотрим кратко его теоретическую основу. Введем понятие упрощенной (идеализированной) модели резьбового соединения. Это такое резьбовое соединение, для которого на протяжении всей затяжки соблюдается прямо пропорциональная зависимость момента
0
5
на гайке от ее угла поворота. На фиг.2 показаны графики зависимостей момента и усилия затяжки от угла поворота гайки для упрощенной (идеализированной) модели (М тпд 0 и 0 и для реального резьбового соединения (( (3) и Q ( р(®)}. Графики М f (0) и Q (f (0) имеют существенную нелинейность на начальном этапе затяжки до завершения процесса обжатия стыка (снятия микронеровностей, выравнивания пакета деталей до полного прилегания и т.п.). Вплоть до достижения предела текучести материала болта наблюдаются прямолинейные участки (на зависимость М f (0) накладываются помехи из-за колебаний в процессе затяжки значений коэффициентов трения в резьбе и по торцу гайки), на которых графики Q p(Q) и М f ( 0) параллельны графикам 0
0 99пд(0) и М тпд (0) соответственно, но смещены по оси углов поворота гайки на величину 0о. Таким образом, чтобы установить взаимосвязь между реальным резьбовым соединением и упрощенной
5 (идеализированной) моделью его, необходимо знать углы /5 и у (фиг.2) и начальный угол 0р.
При затяжке упрощенной (идеализированной) модели резьбового соединения ре- дкоударными гайковертами с постоянной энергией единичного удара (Ае const) имеем (фиг.З)
0
35 Ае
Mi
0зМ3 02М2 2 2
iM,-i
40
или
0,2.
«,2
с. 2,
tg у Qj2 tg у (Jt tg у
До- --,
0з 2tg у 2
(Cv,2
tgy
50
-itgy
где 0i , 02 , 030, и ML M2, МзM, углы поворота гайки и моменты на ней соответственно после 1-го, 2-го, 3-го,.. . 1-го ударов.
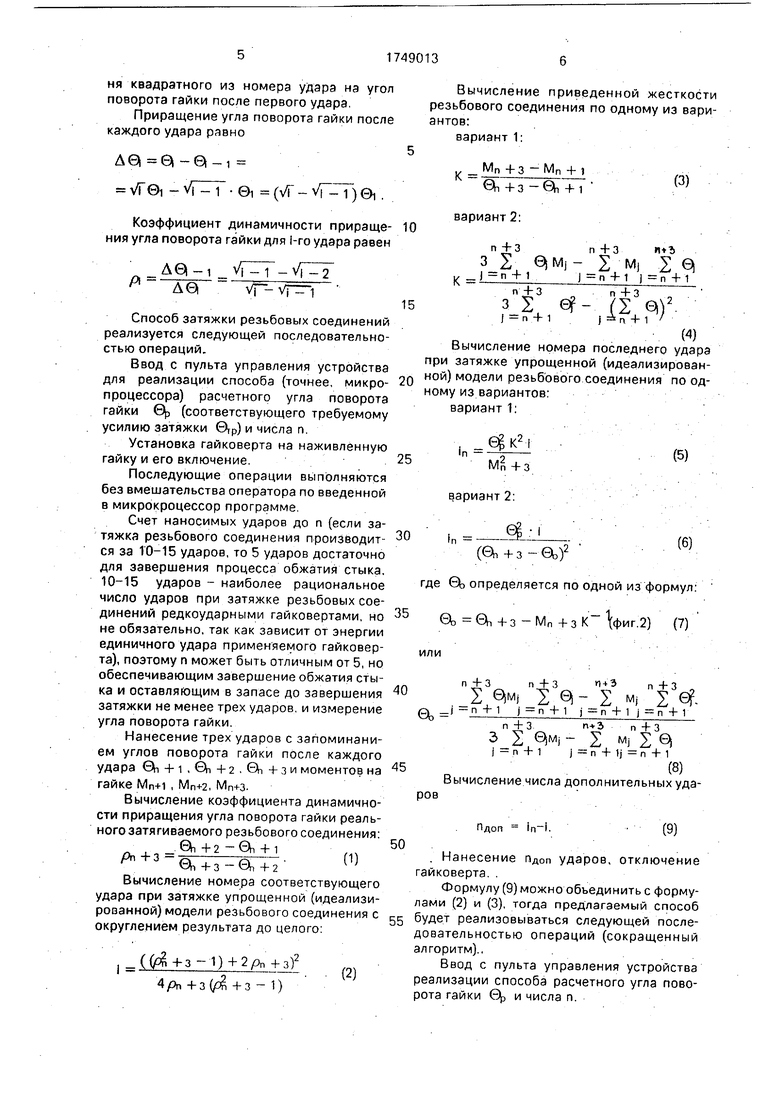
Отсюда можно получить: 0 vT ©i. Таким образом, угол поворота гайки после любого удара равен произведению корня квадратного из номера удара на угол поворота гайки после первого удара.
Приращение угла поворота гайки после каждого удара равно
Вычисление приведенной жесткости резьбового соединения по одному из вариантов:
вариант 1:



| название | год | авторы | номер документа |
|---|---|---|---|
| Способ затяжки резьбовых соединений | 1989 |
|
SU1650424A1 |
| Способ затяжки резьбовых соединений | 1986 |
|
SU1388272A1 |
| Способ затяжки резьбовых соединений | 1987 |
|
SU1493454A1 |
| Способ контроля затяжки при сборке резьбовых соединений ударными гайковёртами | 2017 |
|
RU2659451C1 |
| Способ сборки резьбовых соединений | 1988 |
|
SU1579760A1 |
| СПОСОБ ЗАТЯЖКИ РЕЗЬБОВЫХ СОЕДИНЕНИЙ УДАРНЫМ ГАЙКОВЕРТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2360785C2 |
| Пневматический ударный гайковерт | 1981 |
|
SU973338A1 |
| Способ затяжки резьбовых соединений | 1985 |
|
SU1240569A1 |
| Способ контроля качества сборки резьбовых соединений | 1990 |
|
SU1767373A1 |
| Устройство для ограничения момента затяжки резьбовых соединений | 1989 |
|
SU1698046A1 |


Изобретение относится к механизированной сборке ответственных резьбовых соединений с применением редкоударных гайковертов. Цель изобретения - повышение надежности за счет увеличения точности достижения требуемого усилия затяжки Производят обжатие стыка, наносят несколько ударов с замером после каждого из них угла поворота гайки и момента на ней и вычисляют по замеренным параметрам число дополнительных ударов, необходимых для достижения требуемого усилия затяжки, которое определяется углом поворота гайки. При нахождении числа дополнительных ударов используют численный метод определения соответствия между реальным резьбовым соединением и его упрощенной моделью 3 ил
vT0i 01 (VT - vT- 1) 0i
Коэффициент динамичности прираще- 10 ния угла поворота гайки для 1-го удара равен
0
vr-vm
Способ затяжки резьбовых соединений реализуется следующей последовательностью операций.
Ввод с пульта управления устройства для реализации способа (точнее, микропроцессора) расчетного угла поворота гайки Э|э (соответствующего требуемому усилию затяжки ©ф) и числа п.
Установка гайковерта на наживленную гайку и его включение.
Последующие операции выполняются без вмешательства оператора по введенной в микрокроцессор программе
Счет наносимых ударов до п (если затяжка резьбового соединения производится за 10-15 ударов, то 5 ударов достаточно для завершения процесса обжатия стыка. 10-15 ударов - наиболее рациональное число ударов при затяжке резьбовых соединений редкоударными гайковертами, но не обязательно, так как зависит от энергии единичного удара применяемого гайковерта), поэтому п может быть отличным от 5, но обеспечивающим завершение обжатия стыка и оставляющим в запасе до завершения затяжки не менее трех ударов, и измерение угла поворота гайки.
Нанесение трех ударов с запоминанием углов поворота гайки после каждого удара 0h + i,.GVi-f3H моментов на
гайке Мп-н , Мп+2, Мп+з.
Вычисление коэффициента динамичности приращения угла поворота гайки реального затягиваемого резьбового соединения:
/On +з 75
(1)
+ 3 - +2
Вычисление номера соответствующего удара при затяжке упрощенной (идеализированной) модели резьбового соединения с округлением результата до целогоI (()+2/оп+з)2
4/Эп + 3( +3 - 1)
К
Мп +з -Мп + 1
&ь +з -fch +1 вариант 2:
п +3п +3П+Ъ
зЈ esMj- Ј MJ Ј в)
J п +1 п + 1
п +3
3 2L
j п + 1
п +3
IV
) а + 1
(4)
Вычисление номера последнего удара при затяжке упрощенной (идеализированной) модели резьбового соединения по одному из вариантов:
вариант 1:
25
(5)
вариант 2:
« 2
(6)
(fcVi +з где Оэ определяется по одной из формул:
еь-еЪ+з-Мп+зК фиг) (7) или
п +3п +31+Эп +з
СЛ
2, О|М) 2, м z/ м) 2, ®Г/q, j - n + 1 j - n + 1
n +3n+3 n +3
3 2 €}M, - MJ Ј +
(8)
Вычисление числа дополнительных ударов
Пдоп - .
(9)
50
55
Нанесение пДОп ударов, отключение гайковерта. .
Формулу (9) можно объединить с формулами (2) и (3), тогда предлагаемый способ будет реализовываться следующей последовательностью операций (сокращенный алгоритм).,
Ввод с пульта управления устройства реализации способа расчетного угла поворота гайки Ор и числа п.
Установка гайковерта на наживленную гайку и его включение.
Счет наносимых ударов до п и измерение угла поворота гайки.
Нанесение трех ударов с запоминанием углов поворота гайки после каждого удара Oh+i,6h+2,®i+3M соответствующих им моментов на гайке Мп+1, Мп+2
МгН-З.
Вычисление коэффициента динамичности приращения угла поворота гайки затягиваемого резьбового соединения для (п+3)-го удара
+ 3
Вычисление приведенной жесткости резьбового соединения
Мп + з - Мп -И
-
fcV, +1
Вычисление числа дополнительных ударов
(#+з-1)+2/,+з
Пдоп - -у4 рп + з OOR + з - 1)
/ о к 2
. 1
l Mn+3J
Вычислили приведенную жесткость резьбового соединения по формуле (3).
К 914,9625, по формуле (4) ,75863.
После округления результатов для дальнейших расчетов приняли . На практике К следует определить один раз по одной из формул (3) или (4). 10Вычислили:
по формуле (7)
Gb 0,6046; по формуле (8)
6о 0,60491754.
15 После округления результатов для дальнейших расчетов приняли 0Ь 0,605. На практике достаточно определить 6ь один раз по одной из формул (7) или (8).
Вычислили: 20 по формуле (5)
,8; по формуле (6) ,9.Результат вычислений округлили до целого и приняли .
Вычислили по формуле (9)
Пдоп Ю.
Нанесли 10 ударов и отключили гайковерт.
(10) 30По сокращенному алгоритму вместо 6-й,
8-й и 9-й операций выполнялась одна операция определения числа дополнительных ударов (по формуле (10)):
25
Пдоп ударов, отключение
Нанесение гайковерта.
Пример. Производилась затяжка гайки болта М 24 х 3. Исходя из требуемого усилия затяжки ( кН) и суммарной податливости резьбового соединения, определяли расчетный угол поворота гайки Эр 1,216 рад. Гайковерт выбрали такой энергии единичного удара, чтобы затяжку осуществить примерно на 15 ударов.
Ввели с пульта управления значения ,216 и (программа введена заранее).
Наживили айку до соприкосновения со стягиваемой деталью, установили гайковерт и включили его.
Нанесли 5 ударов.
Нанесли 6-й,7-й, 8-й удары и заполнили ,225, ,292, вЬ 1.353 и Me 667 (Нм), , .
Вычислили по формуле (1) коэффициент ре, 1,0983606.
Вычислили по формуле (2) номер удара
,3685954,
округлили значение до целого числа и приняли .
Пдоп 10,446175 10.
Остальные операции выполнялись без изменения.
В резьбовом соединении было достигнуто усилие в 324 кН, угол поворота гайки составил 1,804 рад. После нанесения предпоследнего удара в резьбовом соединении было зафиксировано усилие в 314 кН. Учитывая, что число ударов округляется до целого, можно сделать вывод, что абсолютная погрешность способа равна половине приращения усилия затяжки после последнего удара, следовательно, с уменьшением числа ударов до завершения затяжки точность
обеспечения заданного усилия снижается,, так как после первых ударов приращения усилия в резьбовом соединении больше, чем после последующих. Для нашего примера максимальная погрешность за счет округления числа ударов составляет
324
1314 хЖ 1.53%.
По сравнению с известным способом, где достигается высокая точность обеспече- ния требуемого момента, который связан с усилием затяжки через коэффициенты трения в резьбе и по торцу гайки, предлагаемый способ позволяет обеспечить более высокую точность достижения требуемого усилия затяжки, так как оно выражается через угол поворота гайки,который не зависит от коэффициентов трения.
Формула изобретения Способ затяжки резьбовых соединений, заключающийся в обжатии стыка и затяжке ударами, замере текущего угла поворота гайки и момента на ней по завершении обжатия стыка после трех последовательных ударов, определении коэффициента дина- мичности приращения угла поворота гайки и приведенной жесткости резьбового соединения, нахождении числа дополнительных ударов и окончании затяжки после их нанесения, отличающийся тем, что, с
целью повышения надежности, задают расчетный угол поворота гайки, а число допол- нительных ударов определяют из выражения
Пдоп -
.(оЈ+з-1)+2/Зп+з 2 4/On +з(оЈ +з - 1)
где ®р - расчетный угол поворота гайки;
К - приведенная жесткость резьбового соединения;
Мп+з - момент затяжки на гайке после последнего из трех последовательно нанесенных ударов;
+ з - коэффициент динамичности приращения угла поворота гайки после последнего из трех последовательно нанесенных ударов;
п - количество нанесенных при обжатии стыка ударов.
Фиг.1
со о
СП
чг-5: CD
м
о
а
% 0 0/-/
#kJ «
(e)
| СПОСОБ ЗАТЯЖКИ РЕЗЬБОВЫХ СОЕДИНЕНИЙ | 0 |
|
SU254409A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Запальная свеча для двигателей | 1924 |
|
SU1967A1 |
| Способ затяжки резьбовых соединений | 1989 |
|
SU1650424A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
