Изобретение относится к подъемно- транспортному машиностроению, а именно к кранам-манипуляторам, установленным на шасси автомобиля.
Известны краны-манипуляторы, содержащие колонну, стрелу с подъемным механизмом и грузозахватное устройство. Колонна закреплена на раме. Дополнительные опоры выполнены жесткими.
Наиболее близким к предлагаемому является бортовой манипулятор МКС-5531, содержащий консольную раму, прикрепленную к задним торцам лонжеронов рамы автомобильного шасси, поворотную колонну, смонтированную по консольной раме, стрелу с грузоподъемным механизмом, шарнирно закрепленную на поворотной колонне и выдвижные посредством силового цилиндра опоры, смонтированные на горизонтальных балках, выдвигаемых из консольной рамы.
Недостатком известного устройства является то, что задний мост шасси при работе в крановом режиме загружен почти полностью и не препятствует деформации рам, что приводит к большим деформациям рамы от кручения и изгиба и увеличивает ее металлоемкость. При установке кранов-манипуляторов на выдвижные опоры создаются большие удельные давления на площадку, что не обеспечивает устойчивость их на слабых грунтах.
VI
4 ЧЭ
6 00
Цель изобретения - улучшение эксплуатационных характеристик кранов-манипуляторов путем снижения металлоемкости рамы шасси и повышения устойчивости при работе на слабых грунтах.
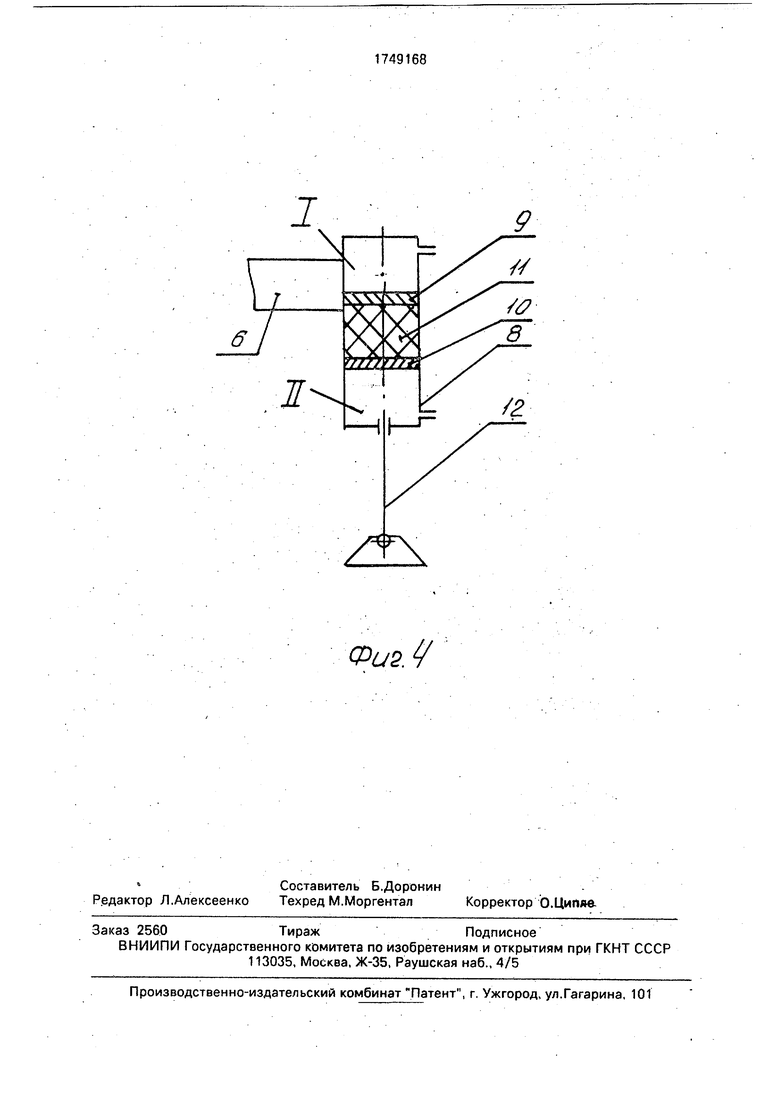
Поставленная цель достигается тем, что выдвижение опоры выполнены упругими, а оси горизонтальных балок выдвижных опор расположены на прямой, проходящей через ось поворота колонны, силовой цилиндр каждой выдвижной опоры выполнен с поршнем, состоящим из двух частей, между которыми размещен упругий элемент, причем шток соединен с одним из поршней.
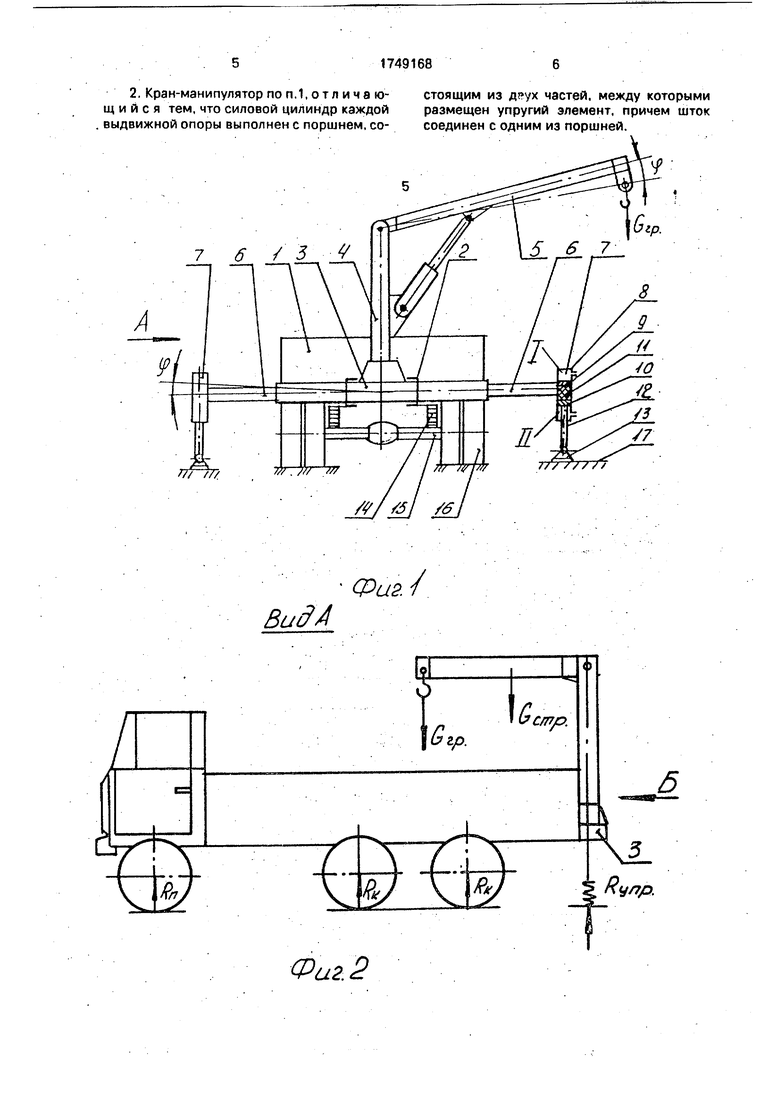
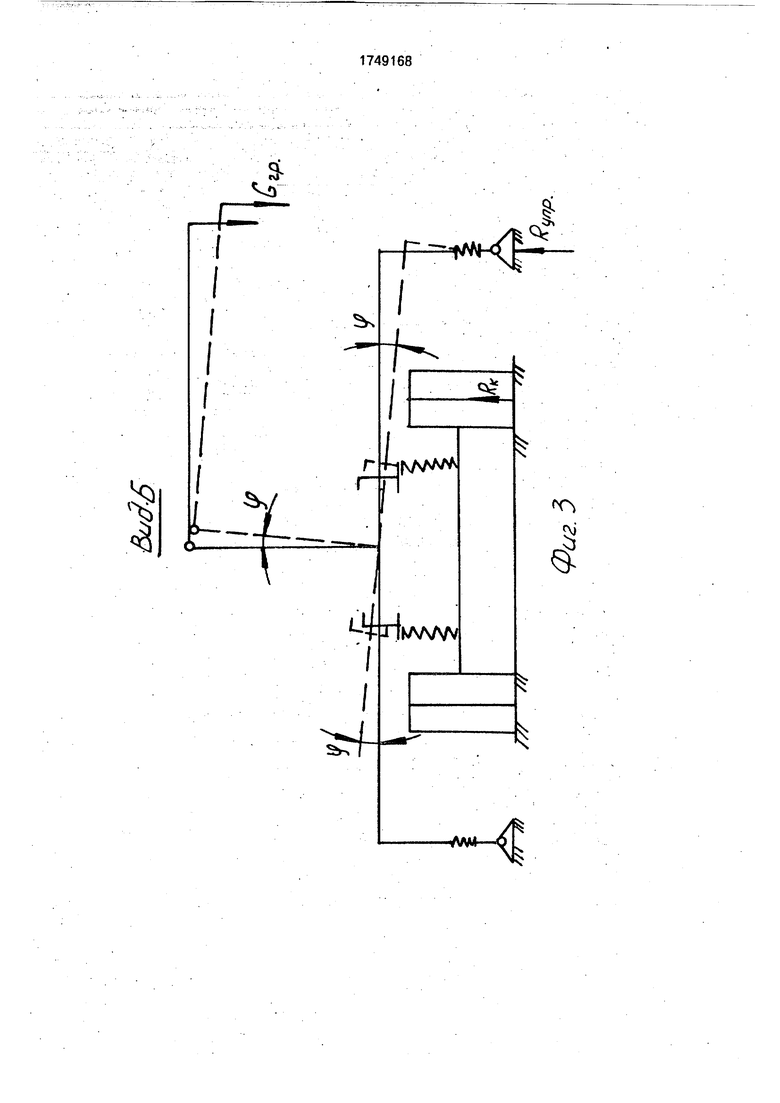
На фиг.1 изображен кран-манипулятор, установленный на упругие опоры и колеса шасси автомобиля, вид сзади; на фиг.2 - вид А на фиг.1; на фиг.З - схема деформации крана-манипулятора при подъеме груза, вид Б на фиг.2; на фиг.4 - упругая опора.
Кран-манипулятор содержит шасси 1 автомобиля, к задним торцам лонжеронов рамы 2 прикреплена консольная рама 3, на которой смонтированы поворотная колонна 4 со стрелой 5 и грузоподъемным механизмом. На консольной раме 3 смонтированы выдвижные горизонтальные балки б, оси которых расположены на прямой, проходящей через ось поворота колонны. На свободных концах горизонтальных балок 6 закреплены выдвижные упругие опоры 7, каждая из которых содержит цилиндр 8 с поршнем, состоящим из двух частей 9 и 10, между которыми размещен упругий элемент 11, причем шток 12 соединен с частью 10 поршня. Шток 12 имеет подпятник 13. Шасси автомобиля 1 содержит рессоры 14, задний мост 15 и колеса 16. Кран-манипулятор установлен на площадке 17.
Кран-манипулятор работает следующим образом.
Перед подъемом груза производится установка упругих опор 7 на площадку 17. Для этого выдвигаются горизонтальные балки 6 в рабочее положение из консольной рамы 3, а в полость I цилиндра 8 подается рабочая жидкость под давлением. Поршень 9 перемещается вниз и через упругий элемент 11 опускает поршень 10 и шток 12 до опоры подпятника 13 на площадку 17. Дополнительные упругие опоры загружаются установленным усилием, не превышающим необходимое для выравнивания крена крана-манипулятора на площадках с допустимым уклоном. Контроль осуществляется по креномеру. Дополнительные упругие опоры имеют заданный упругий ход и заданную упругость, причем ход ограничен допустимым углом наклона крана- манипулятора, а упругость дополнительной
опоры должна быть близкой к упругости рессор и колес шасси.
При подъеме груза манипулятором на раму 2 шасси действует крутящий и изгибающий моменты соответственно в поперечной и продольной плоскостях. Под действием усилия от крутящего момента упругий элемент 11 деформируется и опора 7 воспринимает только часть усилия, остальная нагрузка воспринимается колесами 16 шасси и рессорами 14. За счет этого происходит поворот на угол р горизонтальной балки о (фиг.З) с консольной рамой 3 и рамы 2 шасси вокруг оси поворота колонны 4. При
этом вступает в действие опора рамы 2 шасси 1 на площадку 17 в виде рессор 14 заднего моста 15 и колес 16. В результате угол закручивания рамы 2 по длине ограничивается. В этом случае, рама шасси
автомобиля совместно опирается на передний, задний мосты и на дополнительные упругие опоры. Это уменьшает деформации рамы шасси как от кручения, так и от изгиба, а также снижает удельное давление на установочную площадку за счет увеличивающейся площади опоры. Таким образом, улучшается эксплуатационная характеристика крана-манипулятора путем уменьшения деформации рамы, а следовательно,
снижения ее металлоемкости и повышения устойчивости при работе на слабых грунтах, После окончания работы крана-манипулятора в полость Л цилиндра 8 подается рабочая жидкость под давлением, а полость
I соединяется со сливной магистралью и производится подъем штока 12. Балки 6 задвигаются и кран-манипулятор переводится в транспортное положение.
40
Формула изобретения
1. Кран-манипулятор, содержащий консольную раму, прикрепленную к задним торцам лонжеронов рамы автомобильного шасси,
поворотную колонну, смонтированную на консольной раме, стрелу с грузоподъемным меха- низмом, шарнирно закрепленную на поворотной колонне, и выдвижные посредством силового цилиндра опоры, смонтированные на горизонтальных балках, выдвигаемых из консольной рамы, отличающийся тем, что, с целью улучшения эксплуатационных характеристик путем снижения металлоемкости рамы шасси и повышения устойчивости при
работе на слабых грунтах, выдвижные опоры выполнены упругими, а оси горизонтальных балок выдвижных опор расположены на прямой, проходящей через ось поворота колонны.
2. Кран-манипулятор по п. 1, о т л и ч а ю- стоящим из частей, между которыми щийся тем, что силовой цилиндр каждой размещен упругий элемент, причем шток выдвижной опоры выполнен с поршнем, со- соединен с одним из поршней.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| ЧЕТЫРЕХОСНОЕ КРАНОВОЕ ШАССИ | 2018 |
|
RU2684226C1 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
| ГРУЗОВАЯ КОЛЕСНАЯ МАШИНА | 2007 |
|
RU2347692C1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2237612C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166472C1 |
| ПОГРУЗЧИК | 2002 |
|
RU2230698C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| СОРТИМЕНТОВОЗНЫЙ КРАН-МАНИПУЛЯТОР | 1996 |
|
RU2123947C1 |
| ОСНОВАНИЕ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА ГИДРОМАНИПУЛЯТОРА | 1996 |
|
RU2124470C1 |
Использование: подъемно-транспортное машиностроение, а именно краны-манипуляторы, установленные на шасси автомобиля. Сущность изобретения: кран-манипулятор содержит шасси автомобиля. К задним торцам лонжеронов рамы прикреплена консольная рама, на которой смонтираваны поворотная колонна со стрелой и грузоподъемным механизмом. На консольной раме смонтированы выдвижные горизонтальные балки, оси которых расположены на прямой, проходящей через ось поворота колонны. На свободных концах горизонтальных балок закреплены выдвижные упругие опоры, каждая из которых содержит цилиндр с поршнем, состоящим из двух частей, между которыми раз- мещен упругий элемент, причем шток соединен с одной частью поршня Шток имеет подпятник. 1 з.п. ф-лы, 4 ил. W И
7 6 / 3 У
А
ВидЛ
Фиг. 2
Фи9.
Ч
s
i
d
4
I
4н
N
1
/У
Фиэ.У
| Манипулятор | 1986 |
|
SU1393620A1 |
| Манипулятор | 1986 |
|
SU1393624A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
| РАСПЫЛИВАЮЩЕЕ УСТРОЙСТВО | 0 |
|
SU384491A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Способ получения препарата для дубления кож | 1926 |
|
SU5531A1 |
| Министерство строительного, дорожного и коммунального машиностроения | |||
| СССР, ЦНИИТЭстроймаш, 1988. | |||
