Изобретение относятся к мягаино- строению, в частности к устройствам ггредняяначениым для подъема и транспортирования изделий при загрузке технологического оборудования, а. именно к манипуляторам.
Цель изобретения - расширение технологических возможностей манипулятора за счет обеспечения захвата неориентированных относительно за- хватного органа деталей и улучшение динамических характеристик за счет I снижения ударньк нагрузок на кинематические звенья манипулятора. I На фиг.1 показан манипулятор, I общий вид; на фиг.2 - изделие на I рабочей позиции станка, например в j-патроне.
Манипулятор содержит Ьснование 1, на котором смонтированы поворотная I колонна 2 и привод 3 ее поворота I На колонне 2 закреплена консоль 4, несущая гатангу 5 с захватным органом 6. Штанга 5 установлена в смонтиро- Iванной на консоли 4 гзаровой опоре 7 |с возможностью поступательного пере |мещения и отклонения,,, Поступательное перемещение щтанги 5 осуществляется :от привода 8, связанного со штангой 5 гибким элементом 9 через полиспаст ), закрепленный на штанге 5.
В средней части гатанги 5 закрепле механизм стабилизации, выполненный в виде подпружиненного буфера, содержащего жестко закрепленные на штанге нижний диск 1 ,, расположенные по его периметру пруж:ины 12 и верхни рогнутьй диск 13. Снизу шаровой опо ры на консоли 4 закреплен вьшуклый Диск 14, взаимодейстЕ:угощий при подъе Ие штанги 5 с вогнутым диском 13«
Сверху опоры 7 установлен подпружиненные рычаги 15 с роликами 16.
Манипулятор работает следующим образом.
Деталь 17, например крановое колесо, в палете 18 подается каким- либо транспортным устройством в исходное положение (фиг,). Подается команда ня опускание штанги 5 с захватным органом 6 на деталь 17, 3ахватный орган 6 оснащен специально «справкой с заборньв- конусом (не показана), позволяющей ему войти в отверстие детали даже в том случае, «с-пи ось детали имеет значительное смещение относительно оси захвата
5
0
5
0
Однако при этом деталь остается неподвижной, я штанга 5 отклоняется на соответствующий угол в щаровой опоре 7«
После захвата детали подется команда на подъем щтанги 5. В верхнем положении штянги 5 срабатывает механизм стабилизации, при этом вогнутый подвижньй диск 3 прижимается к выпуклому неподвижному диску 14, фиксируя тем самым вертикальное положение щтанги 5,
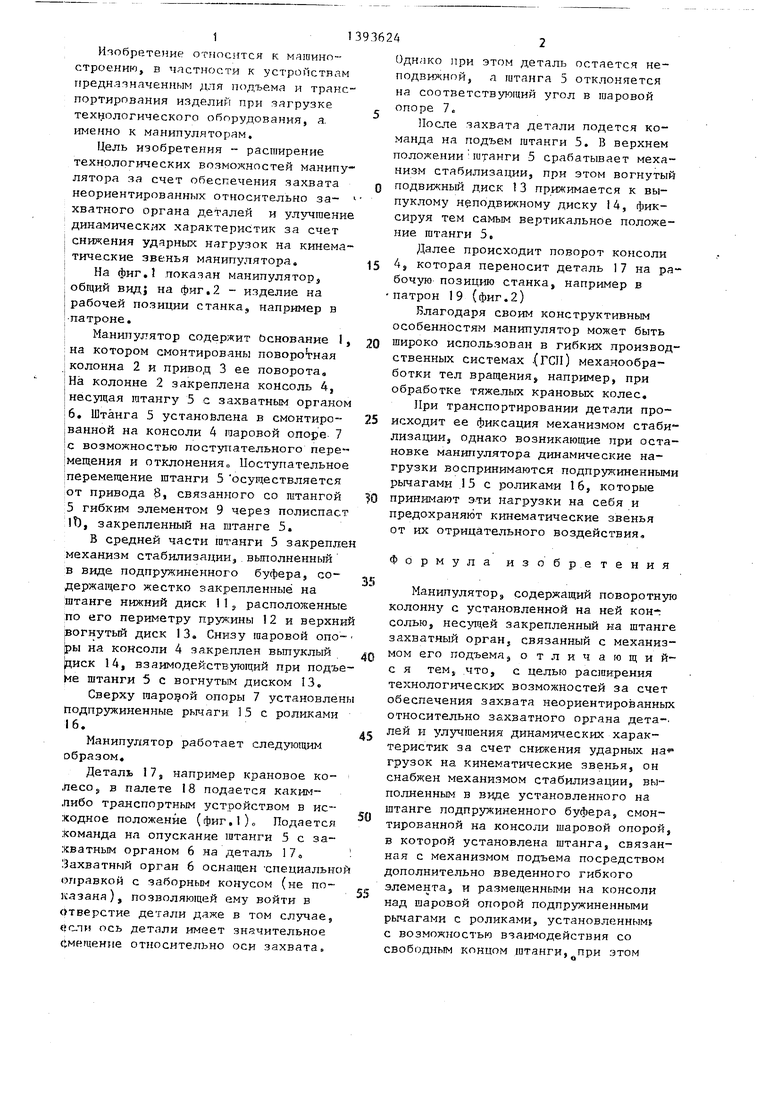
Далее происходит поворот консоли 4s которая переносит деталь 17 на рабочую позицию станка, например в патрон 19 (фиг.2)
Благодаря своим конструктивным особенностям манипулятор может быть широко использован в гибких производственных системах -(ГСП) механообработки тел вращения, например, при обработке тяжелых крановых колес.
При транспортировании детали происходит ее фиксация механизмом стаби лизации, однако возникающие при остановке манипулятора динамические нагрузки воспринимаются подпружиненными рычагами 15 с роликами 16, которые принимают эти нагрузки на себя и предохраняют кинематические звенья от их отрицательного воздействия.
Формула
изо
р е т е и и я
5
5
0
5
Манипулятор, содержащий поворотнзпо колонну с установленной на ней кон-г солью, несущей закрепленный на штанге захватный орган, связанный с механизмом его подъема, отличающий- с я тем, .что, с целью расширения технологических возможностей за счет обеспечения захвата неориентированных относительно захватного органа дета-, лей и улучшения динамических характеристик за счет снижения ударных грузок на кинематические звенья, он снабжен механизмом стабилизации, выполненным в виде установленного на штанге подпружиненного буфера, смонтированной на консоли шаровой опорой, в которой установлена штанга, связанная с механизмом подьема посредством дополнительно введенного гибкого элемента, и размещенными на консоли над шаровой опорой подпружиненными рычагами с роликами, установленнымь с возможностью взаиг-юдействия со свободным концом щтанги,при этом
313936244
механизм стабилизации имеет располо-щий возможность взаимодействия с
женный между шаровой опорой и за-ним вьшуклый диск, закрепленн(ш на
хватным органом вогнутый диск и имею- .консоли.
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Минипулятор | 1990 |
|
SU1743849A1 |
| Грузозахватное устройство | 1982 |
|
SU1126525A1 |
| Магазин деталей | 1981 |
|
SU984809A1 |
| Манипулятор | 1986 |
|
SU1315228A1 |
| Вакуумное грузозахватное устройство | 1986 |
|
SU1373667A1 |
| Захват манипулятора | 1984 |
|
SU1373564A1 |
| Устройство для захвата и разгрузкиКОНТЕйНЕРОВ C цАпфАМи | 1979 |
|
SU819041A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
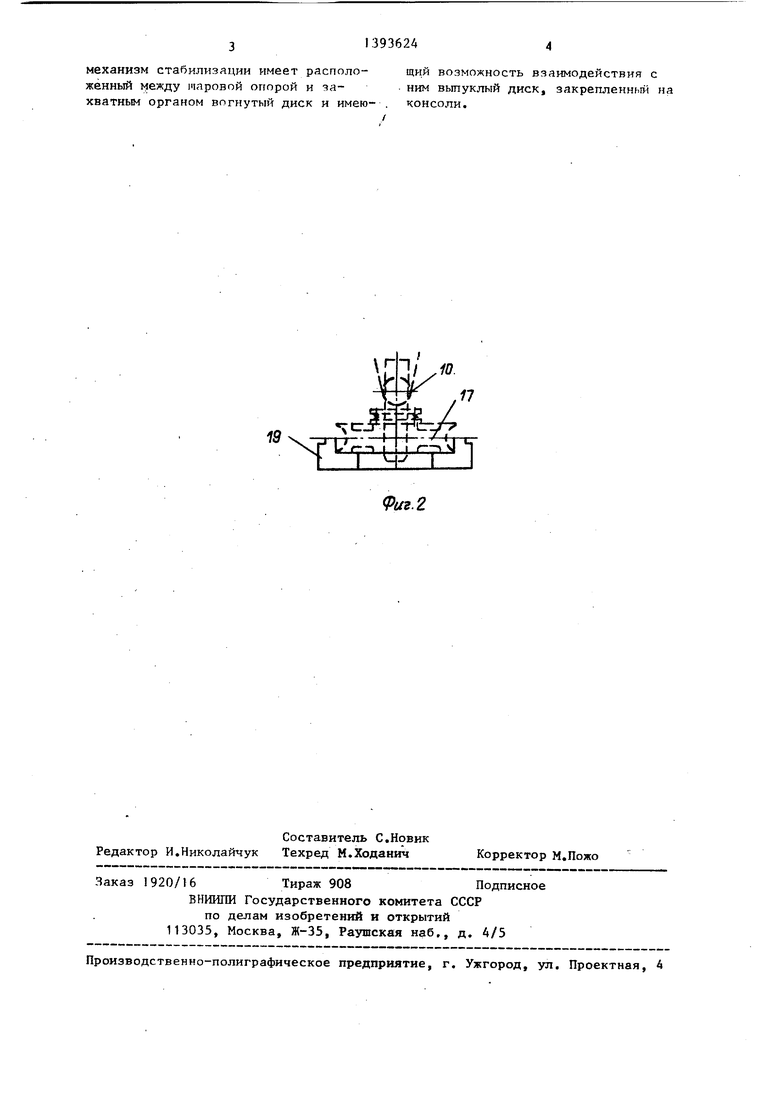
Изобретение относится к области машиностроения, в частности к устройствам, предназначенным для подъема и транспортирования изделий при загрузке технологического оборудования а именно к манипуляторам. Цель изобретения - расширение технологических возможностей за счет обеспечения захвата неориентированных относительно захватного органа деталей и шение динамических характеристик за счет снижения ударных нагрузок на ки нематические звенья манипулятора. При поступлении детали I7 на рабочую позицию со смещением ее оси относительно оси штанги последняя, опускаясь с захватным органом 6 к детали 17, поворачивается в шаровой опоре 7. При подъеме штанги 5 вверх срабат:. тывает механизм стабилизации, выполненный в виде установленного на штанге подпружиненного буфера. При этом его вогнутый подвижный диск 13 прижимается к выпуклому неподвижному диску 14, закрепленному на консоли 4, фиксируя тем самым вертикальное положение штанги 5 2 ил. 16 I (Л
19
xpz
1/ 0
Риг.2
