с .
(Л
;О СО О5 to
.
1
относится к
1393620
машиност.ки дв ме п на
роению, а именно к промышленным роботам, предназначенным для автоматизации тяжелых и монотонных работ, а также для работ в труднодоступных местах.
Целью изобретения является упрощение конструкции и повышение надежности работы манипулятора за счет уменьшения элементов кинематической цепи.
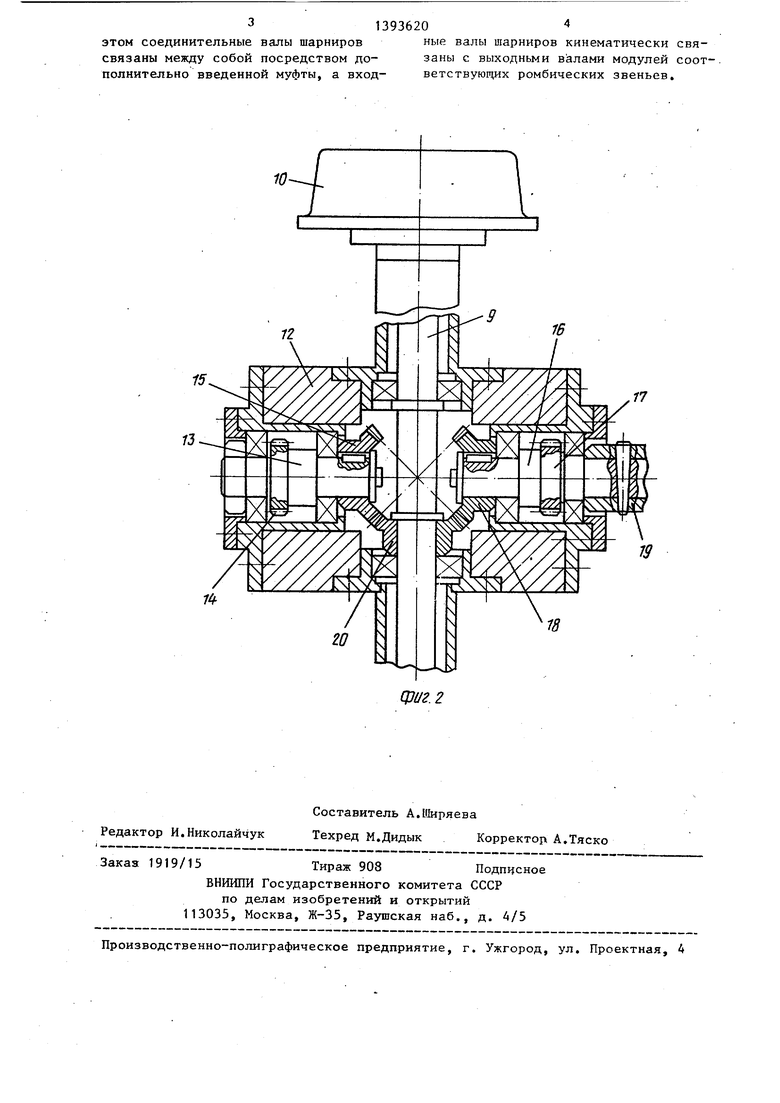
На фиг.1 изображен манипулятор, общий вид; на фиг.2 - шарнир тележки
Манипулятор состоит из основания с направляющими 1, на которых установлена с возможностью перемещения вдоль них тележка 2, несущая ромбические звенья 3 с захватами 4, и блока 5 управления«
Каждое из ромбических звеньев 3 выполнено в виде четырех шарнирно соединенных модулей 6, имеющих приводные элементы с соответствующими выходными валами 7, при этом шарнир
8,соединякяций попарно эти модули 6, включает пару забчатых колес.
Тележка 2 содержит приводные оси
9,на концах которых закреплены движители 10 и которые посредством шарниров 11 связаны с ромбическими звеньями 3.
Каждый из шарниров 11 тележки 2 (фиг.2) содержит полый корпус 12. в котором расположены входной вал 13 с жестко закрепленными на нем цилиндрическими 14 и коническими 15 зубча тыми колесами и соединительный вал 16 с жестко закрепленными на нем цилиндрическим 17 и коническим 18 зубчатыми колесами, причем на одном конце соединительного вала 16 закреплено коническое зубчатое колесо 18, а другой его конец связан с соединительным валом 16 другого шарнира-11 тег
Манипулятор, содержащий основание ,с направляющими, на которых установлена тележка с приводными осями, несущая шарнирно соединенные ромбические звенья с захватами, каждое из
лежки 2 посредством муфты 19 (фиг.О.З которых состоит из четырех шарнирно
На приводных осях 9 закреплены конические зубчатые колеса 20, каждое из которых установлено с возможностью взаимодействия с коническими зубчатыми колесами 15 и 18 соответственно 50 входного 13 и соединительного 16 валов. При этом враш;ение на последние передается от выходных валов 7 приводов модулей 6 ромбического звена 3 посредством зубчатых колес шарнира 55 8, соединяющего модули 6 и цилиндрические зубчатые колеса 14 и 17.
Манипулятор работает следующим образом.
соединенных модулей, включающих приводные элементы с соответствующими выходными валами, отличающийся тем, что, с целью упрощени конструкции и повьшгения надежности за счет уменьшения элементов кинема тической цепи, приводные .оси тележки связаны с ромбическими звеньями посредством дополнительно введенных шарнировJ каждый из которых выполне в виде полого корпуса, установленны в нем соосно с входным и соединител ным валами, связанными между собой коническими зубчатыми колесами, при
5
0
5
0
5
0
При работе манипулятора ромбичес- .кие звенья 3 преобразуют угловые движения модулей 6 в продольное перемещение или боковое вращение звеньев 3, а также н вращательное движение приводных осей 9 с закрепленными на них движителями 10.
Вращательное движение движителей 10 осуществляется путем сложения в каждом шарнире 11 соответственно двух рассогласованных движений, параллельно идущих от пары соответствующих двигателей, 41ринадлежаш 1х модулям 6, приводимых в действие от блока 5 управления через соответствующую пару зубчатых колес, принадлежащих шарнирам 8, к входным валам 13, принадлежащим шарнирам 11, и далее на коническое колесо 20, крутящий момент с которого передается приводным осям 9 с движителями 10, причем один конец соединительного вала 16 одного шарнира 11 жестко соединен муфтой 19 с соединительным валом 16 другого шарнира 11, обеспечивая кинематическое соединение приводных осей 9 шарниров, тем самым способствуя работе движителей 10 без проскальзывания.,
Кроме того, боковое вращение ромбических звеньев 3 манипулятора происходит при замыкании двух параллельных согласованных движителей в каждом шарнире 11 через конические колеса 15, 18 и 20, что способствует боковому повороту ромбических звеньев 3.
Формула изобретения I .
Манипулятор, содержащий основание ,с направляющими, на которых установлена тележка с приводными осями, несущая шарнирно соединенные ромбические звенья с захватами, каждое из
которых состоит из четырех шарнирно
соединенных модулей, включающих приводные элементы с соответствующими выходными валами, отличающийся тем, что, с целью упрощени конструкции и повьшгения надежности за счет уменьшения элементов кинематической цепи, приводные .оси тележки связаны с ромбическими звеньями посредством дополнительно введенных шарнировJ каждый из которых выполнен в виде полого корпуса, установленных в нем соосно с входным и соединительным валами, связанными между собой коническими зубчатыми колесами, при
связаны между собой посредством дополнительно введенной муфты, а входзаны с выходньми валами модулей соответствующих ромбических звеньев.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1197833A1 |
| Манипулятор | 1988 |
|
SU1548035A1 |
| Дифференциальный манипулятор | 1983 |
|
SU1119838A1 |
| Манипулятор | 1980 |
|
SU891425A1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Манипулятор | 1979 |
|
SU831615A1 |
| Модуль манипулятора | 1980 |
|
SU984859A1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| Манипулятор | 1987 |
|
SU1465300A1 |
Изобретение относится к области машиностроения, а именно к промышленным роботам, предназначенным для автоматизации тяжелых и монотонных работ, а также для работ в труднодоступных местах. Целью изобретения является упрощение конструкции и повышение надежности работы манипуля- тора за счет уменьшения элементов кинематических цепей и двигателей. Перемещение ромбических звеньев 3 с захватами 4 вдоль направляющих 1 основания осуществляется посредством тележки 2, вьшолненной из двух связанных между собой шарниров 11, в полости корпусов которых расположены механизмы, передающие движение от приводов модулей 6 ромбических звеньев 3 на приводные оси 9 тележки 2. 2 ил.
п
17
19
18
фиг. 2
| Манипулятор | 1984 |
|
SU1197833A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
