Физ.1
Изобретение относится к измерительной технике и может быть использовано в турбомашиностроении для бесконтактного измерения деформации, индикации повреждения или обрыва лопаток турбомаши- ны.
Цель изобретения - повышение надежности определения деформаций лопаток рабочего колеса турбомашины.
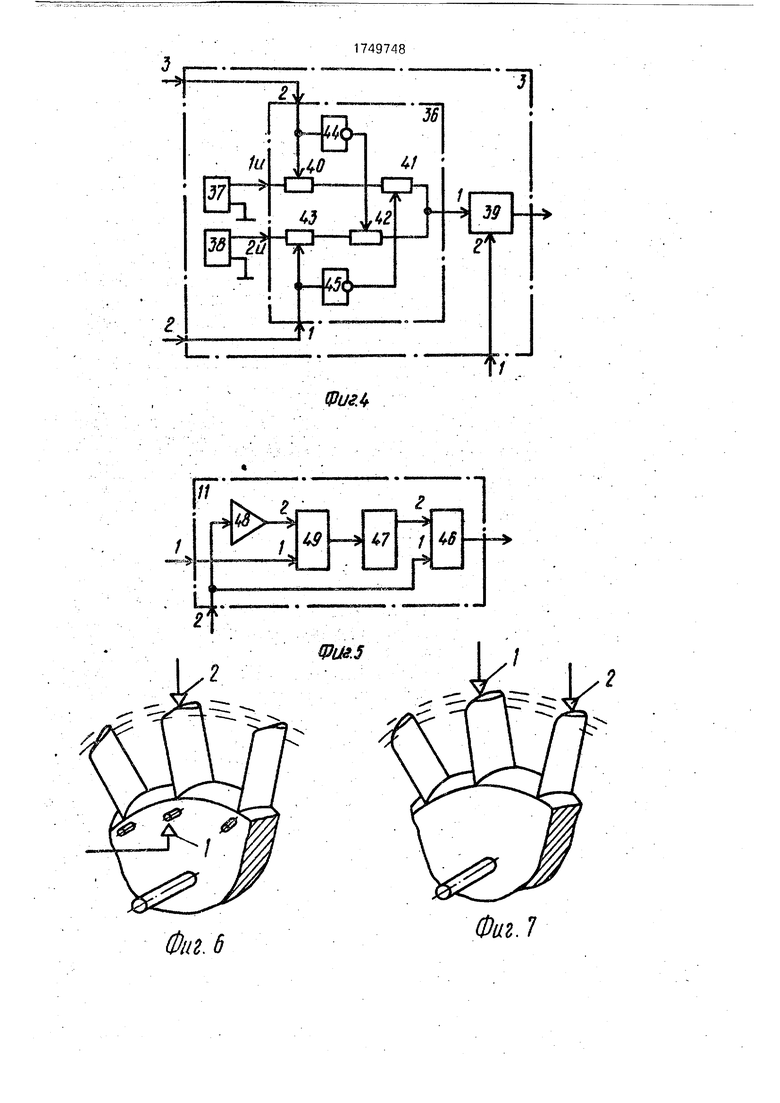
На фиг. 1 представлена структурная схе- ма устройства для реализации способа; на фиг.2 - структурная схема гиперболического преобразователя; на фиг.З -структурная схема блока управления; на фиг.4 - структурная схема преобразователя временного интервала; на фиг.5 - структурная схема блока масштаба; на фиг.6 - вариант размещения импульсных датчиков устройства при измерении изгиба лопаток: на фиг.7 - вариант размещения импульсных датчиков устройства при измерении разношэгицы.ло- паток; на фиг.8 временная диаграмма работы гиперболического преобразователя; на фиг.9 - временная диаграмма работы блока управления; на фиг.10 - временная диаграмма работы устройства; на фиг.11 - временная диаграмма работы устройства при автоматической отстройке при сбоях; на фиг.12 - временная диаграмма работы устройства при автоматической отстройке при текущей работе; на фиг. 13 - график зависимости методической погрешности измерения.
Устройство для реализации способа определения де.формаций лопаток рабочего колеса турбомашины (фиг.1) содержит установленные на невращающихся частях турбомашины первый 1 и второй 2 импульсные датчики расположенные против соответственно выходной и входной кромок перифе- рийного сечения проходящих под ними .лопаток, преобразователь 3 временного интервала, первый 4 и второй 5 формирователи импульсов, входы которых подключены к выходам первого и второго импульсных дат- чиков, двухпозиционный клю-i 6, блок 7 модуля, блок 8 управления, источник 9 опорного напряжения, компаратор 10, блок 11 масштаба, гиперболический преобразователь 12, блок 13 выборки-хранения, пер- вую 14 и вторую 15 выходную шины, выходы первого 4 и второго 5 формирователей импульсов подключены соответственно к первому и второму входам бяока 8 управления, выход преобразователя 3 временно- го интервала - к первому входу гиперболического преобразователя 12, выход которого подключен к первому входу блока 13 выборки-хранения, выход которого подключен к первому входу двухпозиционного ключа 6 и входу блока 7 модуля, выход которого подключен к второй выходной шине 15 и первым входам компаратора 10 и блока 11 масштаба, вторые входы которых подключены к выходу источника 9 опорного напряжения, выход блока 11 масштаба - к второму входу двухпозиционного ключа 6, выход которого подключен к первой выходной шине 14, выход компаратора 10 - к третьим входам двухпозиционного ключа б и блока 8 управления, первый выход последнего - к первому и второму входам, соответственно, преобразователя 3 временного интервала и гиперболического преобразо- .вателя 12. второй и третий выходы - к второму и третьему входам преобразователя 3 временного интервала, четвертый выход - к второму входу блока 13 выборки-хранения, а пятый выход - к третьему входу гиперболического преобразователя 12.
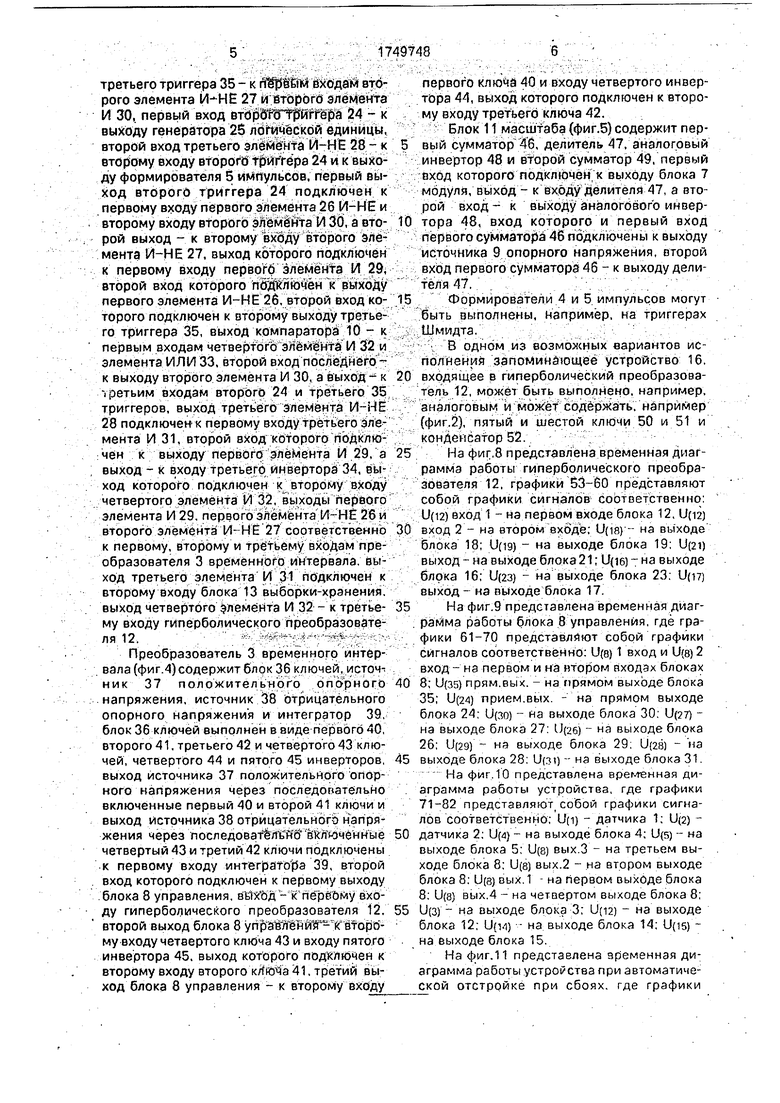
Гиперболический преобразователь 12 (фиг.2) содержит запоминающее устройство 16, генератор 17 гиперболических импульсов, элемент 18 задержки, первый 19 и второй 20 инверторы, первый триггер 21, первый генератор 22 логической единицы и первый элемент ИЛИ 23, первый вход которого подключен к выходу второго инвертора 20, первый вход запоминающего устройства 16 - к выходу преобразователя 3 временного интервала, второй - к выходу первого триггера 21, третий - к выходу первого инвертора 19, а выход - к первому входу генератора 17 гиперболических импульсов, выход которого подключен к первому входу блока 13 выборки-хранения, а второ й вход- к выходу первого элемента ИЛИ 23, второй вход которого и первый вход первого триггера 21 подключены к пятому выходу блока 8 управления, первый выход которого подключен к входам первого инвертора 19 и элемента 18 задержки, выход первого генератора 22 логической единицы - к второму входу первого триггера 21, выход элемента 18 задержки - к входу второго инвертора 20 и третьему входу первого триггера 21, четвертый вход которого подключен к выходу первого инвертора 19.
Блок 8 управления (фиг.З) содержит второй триггер 24, второй генератор 25 логической единицы, первый 26, второй 27 и третий 28 элементы И-НЕ, первый 29, второй 30, третий 31 и четвертый 32 элементы И, элемент ИЛИ 33, третий инвертор 34 и третий триггер 35, первый вход которого подключен к выходу второго генератора 25 логической единицы, первый вход третьего элемента И-НЕ 28 - к второму входу третьего триггера 35 и к выходу первого формирователя А импульсов, первый ЕЫХОД
третьего триггера 35 - к гйЦЛШМ входам второго элемента 1/ЬНЁ 27 и бторого элемента И 30, первый вход втОрдТ6™Тр йгГера 24 - к выходу генератора 25 логической единицы, второй вход третьего элемента И-НЕ 28 - к второму входу второго триггера 24 и к выходу формирователя 5 импульсов, первый выход второго триггера 24 подключен к первому входу первого элемента 26 И-НЕ и второму входу второго элемента И 30, а второй выход - к второму входу второго элемента И-НЕ 27, выход которого подключен к первому входу первого элемента И 29, второй вход которого подключён к выходу первого элемента И-НЕ 26, второй вход которого подключен к второму выходу третьего триггера 35, выход компаратора 10 - к первым входам четвертого элемента И 32 и элемента ИЛИ 33, второй вход последнего - к выходу второго элемента И 30, а выход- к третьим входам второго 24 и третьего 35 триггеров, выход третьего элемента И-НЕ 28 подключен к первому входу третьего элемента И 31, второй вход которого подключен к выходу первого элемента И 29, а выход - к входу третьего инвертора 34, выход которого подключен к второму входу четвертого элемента И 32, выходы первого элемента И 29. первого элемента И-НЕ 26 и второго элемента И-НЕ 27 соответственно к первому, второму и третьему входам преобразователя 3 временного интервала выход третьего элемента И 31 подключен к второму входу блока 13 выборки-хранения выход четвертого элемента И 32 - к третьему входу гиперболического преобразователя 12- - - Преобразователь 3 временного интервала (фиг 4) содержит блок 36 ключей, источник 37 положительного опорного напряжения, источник 38 отрицательного опорного напряжения и интегратор 39 блок 36 ключей выполнен в виде первого 40 второго 41, третьего 42 и четвертого 43 ключей, четвертого 44 и пятого 45 инверторов выход источника 37 положительного опорного напряжения через последовательно включенные первый 40 и второй 41 ключи и выход источника 38 отрицательного напряжения через последовательна включенные четвертый 43 и ретий 42 ключи подключены к первому входу интегратора 39, второй вход которого подключен к первому выходу блока 8 управления, выхЪд - к перейму входу гиперболического преобразователя 12, второй выход блока 8 управлений - « второму входу четвертого ключа 43 и входу пятого инвертора 45, выход которого подключен к второму входу второго кл Ю ча 41. третий выход блока 8 управления - к второму входу
первого ключа 40 и входу четвертого инвертора 44, выход которого подключен к второму входу третьего ключа 42.
Блок 11 масштаба (фиг.5) содержит пер- 5 вый сумматор 46, делитель 47, аналоговый инвертор 48 и второй сумматор 49, первый вход которого подключен к выходу блока 7 модуля, выход - к входу делителя 47, а второй вход - к выходу аналогового инвер- 10 тора 48, вход которого и первый вход первого сумматора 46 подключены к выходу источника 9 опорного напряжения, второй вход первого сумматора 46 - к выходу делителя 47
5 Формирователи 4 и 5 импульсов могут быть выполнены, например, на триггерах Шмидта
В одном из возможных вариантов исполнения запоминающее устройство 16
0 входящее в гиперболический преобразователь 12, может быть выполнено, например, аналоговым и может содержать, например (фиг 2), пятый и шестой ключи 50 и 51 и конденсатор 52
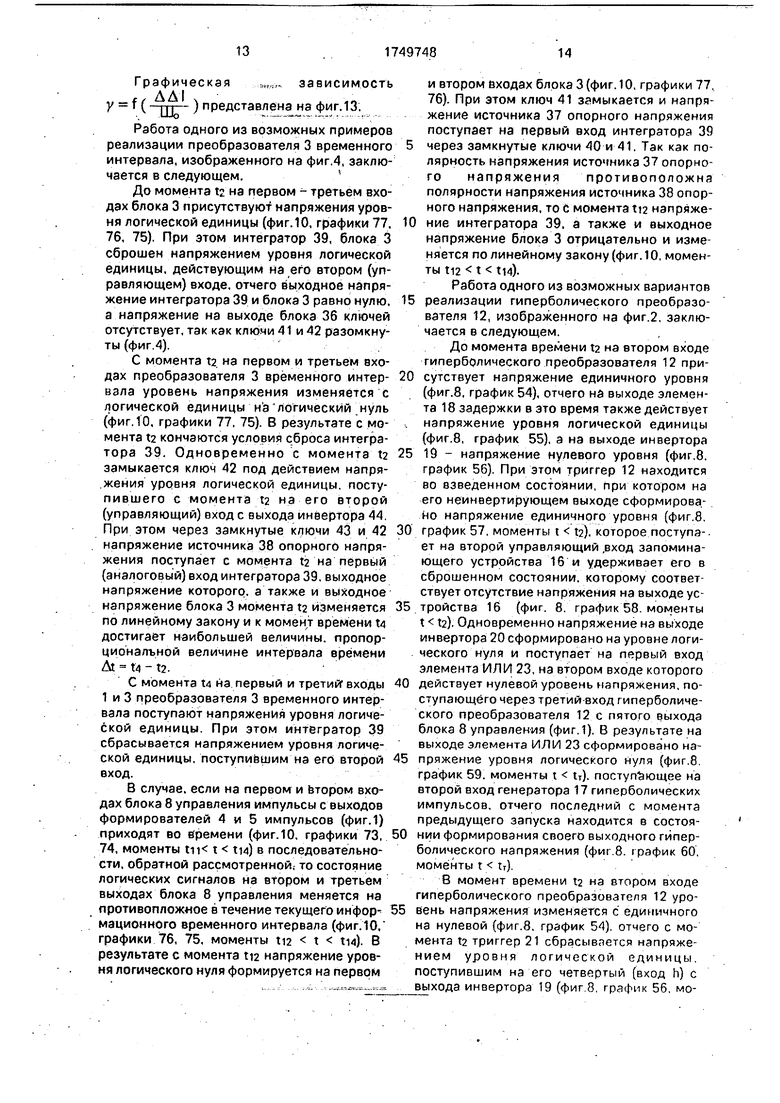
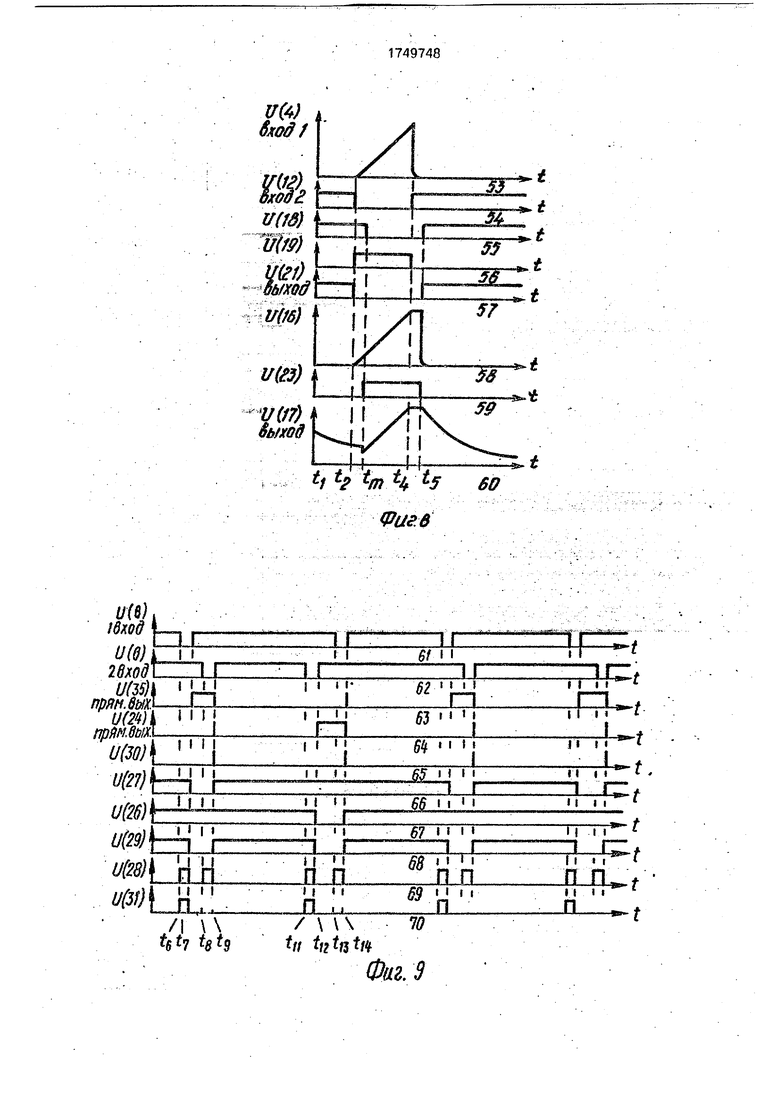
5 На фиг 8 представлена временная диаграмма работы гиперболического преобразователя 12, графики 53-60 представляют собой графики сигналов соответственно U(12) вход 1 - на первом входе блока 12, U(12)
0 вход 2 - на втором еходе, U(i8) - на выходе блока 18, U(ig) - на выходе блока 19 U(2i) выход-на выходе блока 21; U(ie)Ha выходе блока 16, U(23) - на выходе блока 23 U(i) выход- на выходе блока 17
5 На фиг 9 представлена временная диаграмма работы блока 8 управления где графики 61-70 поедставляют собой графики сигналов соответственно U(8) 1 вход и U(8) 2 вход - на первом и на втором входах блоках
0 8, U(35) прям вых - на прямом выходе блока 35, 11(24} прием вых - на прямом выходе блока 24 Uno) на выходе блока 30 Up) - на выходе блока 27 U{26) - на выходе блока 26 11(29) - ня выходе блока 29 U(28) - на
5 выходе блока 28 Up) на выходе блока 31 На фиг 10 представлена временная диаграмма работы устройства где графики 71-82 представляю собой графики сигналов соответственно U(i) - датчика 1, U(2) 0 датчика 2 U(4) - на выходе блока 4, U(s) - на выходе блока 5 U(8) вых 3 - на третьем выходе блока 8 U(в) вых 2 - на втором выходе блока 8 U(8) вых 1 на первом выходе блока 8 11(8) вых 4 - на четвертом вы оде блока 8
5 U(3) на выходе блока 3 U(12) - на выходе блока 12 Un-1) на выходе блока 14 U(is) - на выходе блока 15
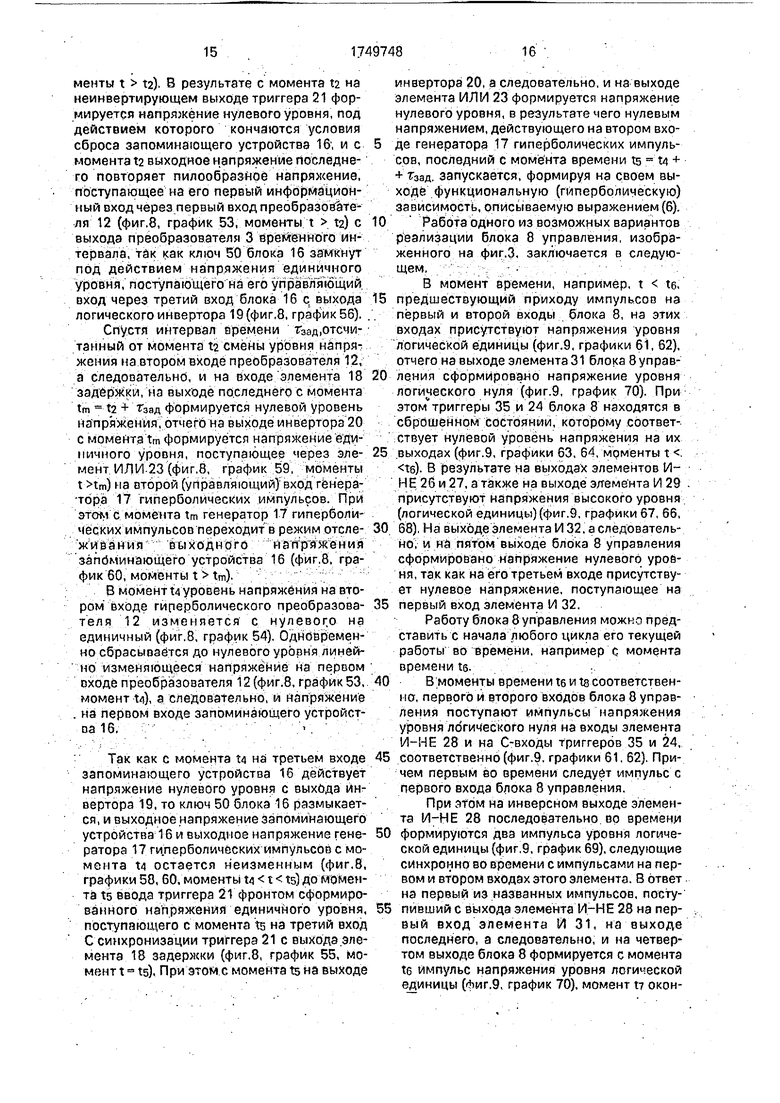
На фиг.11 представлена зременная диаграмма работы устройства при автоматической отстройке при сбоях где графики
83-95 представляют собой графики сигналов соответственно: 11(8} вход - на первом входе 1 блока 8; U(8) 2 вход - на втором входе блока 8; U(35) прям.вых. - на прямом выходе блока 35; U(24) прям.вых. - на прямом выходе блока 24; U(8) бых.З - на третьем выходе блока 8; U(8) вых.2 - на втором выходе блока 8; U(8) вых.1 - на первом выходе блока 8; Up) вых.4 - на четвертом выходе блока 8; U(12) вых. - на выходе блока 12; U{8) вых.5 - на пятом выходе блока 8; U(14) - на выходе блока 14; U(io) вых. - на выходе блока 10; U(is) - на выходе блока 15.
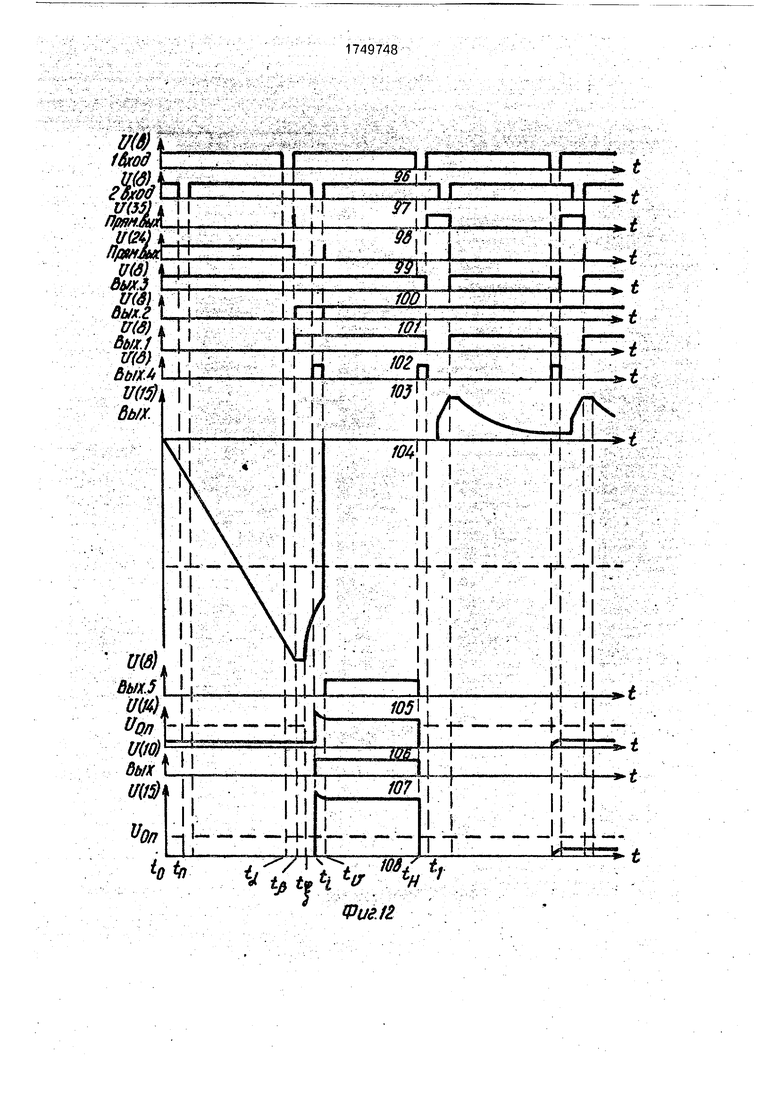
На фиг.12 представлена временная диаграмма работы устройства при автоматической отстройке при текущей работе, где графики 96-108 представляют собой графи- 1 ки сигналов соответственно; U(1B) 1 вход - на первом входе блока 8; 1){в) 2 вход - на втором входе блока 8; 11(35) прям.вых. - на прямом выходе блока 35, U(24) прям.вых. - на прямом выходе блока 24; 1)(в) вых.З - на третьем выходе блока 8; U(B) вых.2 - на втором выходе блока 8; U(e) вых.1 - на первом выходе блока 8; U(8) вых.4 - на четвертом выходе блока 8; U(12) вых. - на выходе блока 12; U(8) вых.5 - на пятом выходе блока 8; U(14) - на выходе блока 14, и(ю)вых. -на выходе блока 10,hU{i5) - на выходе блока 15.
Устройство, реализующее способ, работает следующим образом.
В исходном состоянии синапы с датчиков 1 и 2 отсутствуют (фиг. 1. графики 71, 72, момент t ti). При этом на первом - третьем выходах блока 8 управления (фиг. 1) установлен ы напряжения уровня логической единицы, а на пятом и четвертом выходах блока 8 -.напряжения уровня логического нуля (фиг. 11, графики 75-78). В результате преобразователь 3 временного интервала находится в сброшенном состоянии, которому соответствует нулевой уровень напряжений на его выходе (фиг, 10, график 79, моменты t ti). На выходной шине 14 присутствует либо нулевой уровень напряжения (после включения устройства), либо напряжение, характеризующее предыдущий результат измерения, на шине 15 - модуль напряжения, действующего на шине 14.
С приходом сигналов с импульсных датчиков 1 и 2 на входы формирователей 4 и 5 импульсов на их выходах формируются прямоугольные импульсы напряжений нулевого уровня, моменты времени начала действия которых (фиг. 10, графики 73, 74, моменты ti игз, tents, tn и ti3.-)определены порогами срабатывания пороговых элементов, например триггеров Шмидта формирователей 4 и 5, а моменты времени окончания действия импульсов прямоугольной формы
на выходах формирователей 4 и 5 (фиг. 10, графики 73, 74, моменты t2 и t4, t и tg, ti2 и ti4...) определены моментами перехода через ноль выходных напряжений импульсных датчиков 1 и 2. При этом на первом выходе блока 8 управления формируются импульсы напряжений нулевого уровня, начало действия которых (фиг. 10, график 77. моменты t2.t,ti2,...) определено во времени
0 моментом окончания каждого первого из двух импульсов, поступивших на первый и второй входы блока 8 управления. Конец действия импульсов на первом выходе блока 8 управления (фиг. 10, график 77, моменты
5 t4, tg, ti4....) определен во времени моментом окончания каждого второго из двух выходных импульсов формирователей 4 и 5 импульсов.
С первого выхода блока 8 управления
0 импульсы напряжений поступают на первый вход преобразователя 3 временного интервала и на второй вход гиперболического преобразователя 12. вследствие этого в течение действия импульса снимаются усло5 вия сброса блока 3 и с момента t2, t, Ш... выходное напряжение последнего изменяется по линейному закону, знак которого определяется уровнем напряжений, действующих с указанных моментов на втором и
0 Третьем входах преобразователя 3 временных интервалов.
Если импульс с выхода импульсного датчика 1 следует во времени раньше импульса с импульсного датчика 2 (фиг. 10, гра5 фики 71.72), то на третьем и втором выходах блока 8 управления с момента t2 до момента t4 действуют напряжения уровней, соответственно i , логического нуля (фиг. 10. график 75) и логической единицы (фиг. 10,
0 график 76), поступающие на третий и второй входы преобразователя 3 временного интервала. В результате выходное напряжение блока 3 изменяется во времени с момента t2 согласно (фиг. 10, график 79,
5 моменты i t t4)
12 4м
U(3) --f-f slgn(l) Uonjdt, (1)
Л ,2
где TI - постоянная времени интегрирова- 0 пия интегратора 39 блока 3 (фиг.4);
Uon величина напряжения источника 38 опорного напряжения, входящего в блок 3;
I - -1 - для случая действия на третьем 5 и втором входах блока 3 напряжения уровня, соответственно, логического нуля и логической единицы.
Если же импульс с выхода датчика 1 следует во времени позже импульса с датчика 2 импульсов, то на третьем и втором выходах блока 8 управления с момента ш до ti4 действуют напряжения уровней, соответственно, логической единицы (фиг. 10, график 75) и логического нуля (фиг. 10, график 76), и выходное напрйже нйе преобразователя 3 временного инте р1ШЛа формируется со знаком, обратным указанному в выражении (1) (фиг.10, график 79, моменты ).
С момента t2 начала действия на втором (управляющем) входе гиперболического преобразователя Т2 импульса напряжения уровня логического нуля (фиг. 10, график 77) гиперболический преобразователь 12 переводится в подготовительный режим, включающий в себя первоначальное введение в момент t2 нулевых условий в его времязада- ющие цепи (фиг. 10, график 80) и дальнейшее отслеживание аналоговбго яЭгфяжения. поступающего на первый вхЪД гиперболического преобразователя с выхода преобразователя 3 временного интервала.
К моменту t4 выходное напряжение преобразователя 3 временного интервала определится величиной
1 14 U(3) - - / (-Uonjdt К At. (2)
r
t2
где К - коэффициент пропорциональности, определяемый как
Uon
К
г
At t4 -12
(3)
С момента t4 окончания действия импульса напряжения уровня логического нуля на первом выходе блока 8 управления выходное напряжение управляемого генератора пилообразного напряжения сбрасывается до нулевого уровня (фиг 10, график 79), а гиперболический преобразователь 12 переводится в режим формирования его выходного напряжения (фиг. 10, график 80, моменты t 14).
При этом с момента t4 начала этого режима выходное напряжение преобразователя 12 остается постоянным во времени в течение интервала задержки тзад и равным максимальному напряжению на первом (аналоговом) входе гиперболического преобразователя 12 в момент t4 (фиг. 10, график 80)
U(4) U(3) . (4)
С момента времени ts. определяемого согласно
t5 t4+ Гзад,.(5)
выходное напряжение гиперболического преобразователя 12 изменяется по закону
w..-.) «
где а и Ггип - константы, определяемые свойствами преобразователя.
В зависимости от деформации очередной испытуемой лопатки первый во времени сигнал может поступить на соответствующие формирователи импульсов как с датчи- 5 ка 1, так и с датчика 2.
Так, в ответ на импульс напряжения, пришедший с момента te с выхода датчика 1 (фиг. 10. график 73, моменты t te) на первый вход блока 8 управления, на четвертом вы- 10 ходе последнего с момента te формируется импульс напряжения (фиг. 10, график 78, моменты ) длительностью
Atl t7-t6,(7)
где t - момент окончания импульса.
15 который поступает на второй вход блока 13 выборки-хранения. В течение действия это- гб импульса блок 13 производит выборку напряжения, поступающего на его первый вход с вчыхода преобразователя 12.
20 Выходное напряжение блока 13 поступает на вход блока 7 модуля и на первый (информационный) вход двухпозиционного ключа б. на третьем (управляющем) входе которого действует напряжение уровня ло25 гического нуля, поступающее с выхода компаратора 10. При этом ключ б находится в первом рабочем состоянии, при котором его выход скоммутирован с его первым входом, в результате чего выходное напряжение
30 блока 13 поступает на шину 14 устройства
С момента t выходное напряжение блока 13 выборки-хранения, а следовательно, и напряжение на шмне 14 устройства остается до следующей выборки постоянным во
35 времени (фиг. 10, график 81, моменты t ty) и пропорциональным деформации Д I лопатки
U (14) I t ty U( 15) I i t U(4) t 17 At
40 с методической погрешностью, не превышающей допустимой, что доказывается следующим
Напряжение на выходе гиперболического преобразователя 12 в момент време45 ни t соответствует величине
.... О
После подстановки в полученное выражение значения U(3)l t 14 определенного выражением (2), и значения момента времени ts, определенного выражением (5), выбрав величину Ггип согласно
Ггип Г3ад, (Ю)
получим
(8)
5
MIК At
U(4)
(11)
Учитывая, что величина интервала времени
П-U - ,
(12)
где Т - период вращения колеса турбомаши- ны;
п - количество лопаток на венце колеса турбомашины, получим
U(4) a-K-n (13)
где m - масштабный коэффициент, определяемый согласно
m яКп(14)
Выбрав величину масштабного коэффициента m равной
m - ц ; п D,(15)
где D - внешний диаметр лопаточного венца турбоколеса:
,14- константа;
// - коэффициент пропорциональности, получим
U(4)f Д . (16)
Таким образом, в блоке 13 выборки-хранения с момента t фиксируется величина напряжения, пропорциональная деформации Д I лопатки венца турбоколеса, прошедшей под датчики 1 и 2 устройства.
Величина методической погрешности измерения деформации Д I лопатки может быть определена следующим образом. Как известно, в эксплуатационном режиме каждая лопатка венца турбоколеса при деформации (изгибе, кручении и т.д.) совершает одновременно также и вынужденные колебания с максимальными амплитудами, зависящими от ряда причин (от конструктивных особенностей венца, от скорости вращения турбо.колеса, от неоднородностей воздушных потоков и т.д.). у ,
Если принять за Д| i и ДЫ максимальные амплитуды колебаний одной и той же кромки соседних лопаток на венце и рассмотреть наихудший вариант соотношения фаз их колебаний, то измеренная предлагаемым устройством величина (выраженная через выходное напряжение 0(4) It-t как
Д -U(4) It 17 .О)
характеризукщая с допустимой погрешностью истинную величину Д Ист деформации лопатки, может быть представлена выражением
Al -T
0
5
0
5
(19)
П- D
гл - период следования импульсов с датчика, расположенного над однопитными кромками лопаток венца, определяемый как
гл J+ (ч1 + гн-i).(20)
где время прохождения под датчиком одной из кромок 1-й исследуемой лопатки расстояния, равного максимальной амплитуде деформации этой кромки в направлении, совпадающем с направлением вектора окружной скорости этой лопатки. При этом
;4Шг-()
где тн-1 - время прохождения под датчиком одноименной с названной кромки (Н 1)-й исследуемой лопатки расстояния, равного максимальной амплитуде деформации зтой кромки в направлении, противоположном направлению вектора окружной скорости этой лопатки. Причем
.Д| ( -и)/т
Г|+1я D
Тогда
(22)
0
5
„-Х+т ч.Щ).
1 + П
Т ДД
(23)
Я- D где ДД1 Д171 + ).. .
После подстановки в выражение (18)для значений т иГ1, определенных выражениями (19) и (23), получим л| At ,„,..
Л 1измsrrr TTi. A A i (24)
+ ДД|
Ш0 +&&Y
40 где Ш0
- расстояние между кор
нями соседних I- и (М)-й лопаток.
Так как истинная величина деформации лопатки с нулевой погрешностью характеризуется выражением
С Л ,(25)
Д)
ист
Шс
50
то максимально возможная погрешность измерения предлагаемым устройством определится величиной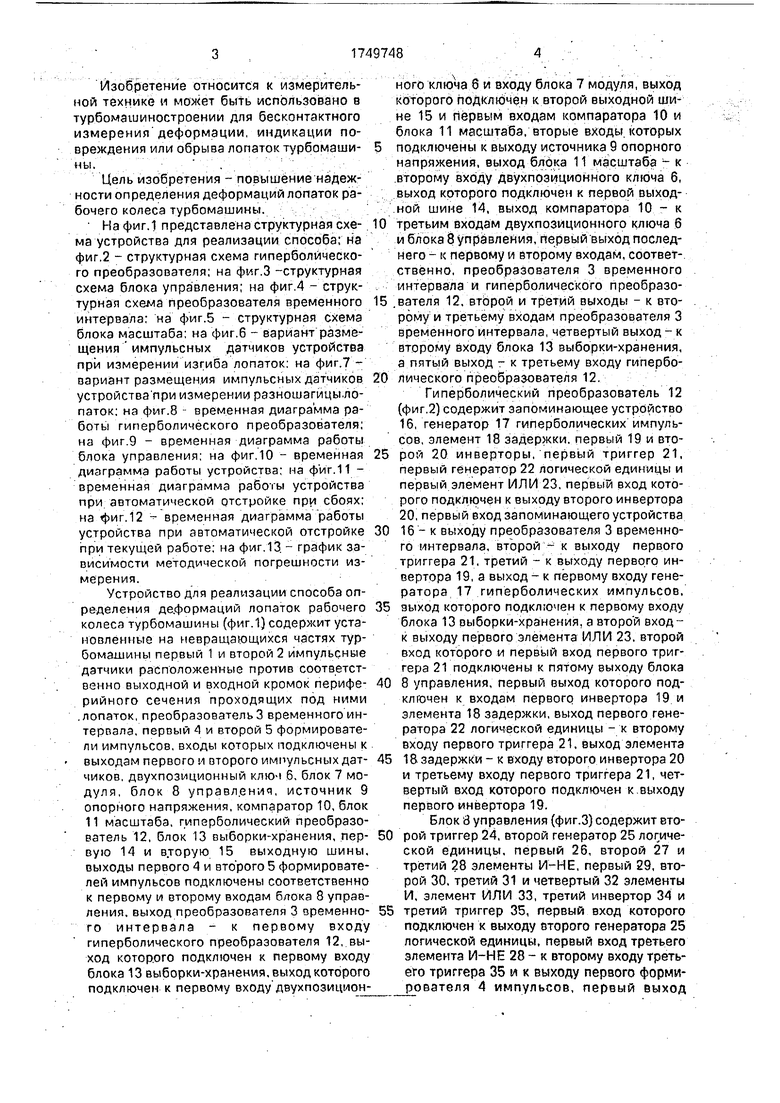




| название | год | авторы | номер документа |
|---|---|---|---|
| Аналого-цифровой частотомер | 1988 |
|
SU1712894A1 |
| Устройство для измерения средних значений нестационарных сигналов | 1985 |
|
SU1347028A1 |
| Устройство для измерения средних значений нестационарных сигналов | 1985 |
|
SU1347027A1 |
| Устройство для измерения средних значений нестационарных сигналов | 1985 |
|
SU1337784A1 |
| Устройство для вычисления отношения периодов импульсных напряжений | 1983 |
|
SU1156097A1 |
| Способ измерения среднего значения напряжения произвольной формы и устройство для его осуществления | 1983 |
|
SU1150561A1 |
| Устройство для управления регулируемым мостовым инвертором | 1988 |
|
SU1548830A1 |
| Частотомер | 1981 |
|
SU1004909A1 |
| Усредняющий преобразователь | 1983 |
|
SU1231460A1 |
| Аналого-цифровой преобразователь | 1983 |
|
SU1102036A2 |




Изобретение относится к информационно-измерительной технике, может быть использовано в турбомашиностроении для бесконтактного измерения деформации индикации повреждения или обрыва лопаток турбомашины и позволяет повысить надежность эксплуатации турбомашин. По сигналам с импульсных датчиков 1 и 2 с помощью блока 8 управления, преобразователя 3 временного интервала, гиперболического преобразователя формируются сигналы, по величине которых судят о деформациях лопаток. Благодаря источнику 9 опорного напряжения, компаратору 10, блоку 11 масштаба и блоку 7 модуля обеспечивается защита устройства от случайных сбоев. Такая реализация пособа и устройства повышает их надежность 2с и 4 з.п. ф-лы, 13 ил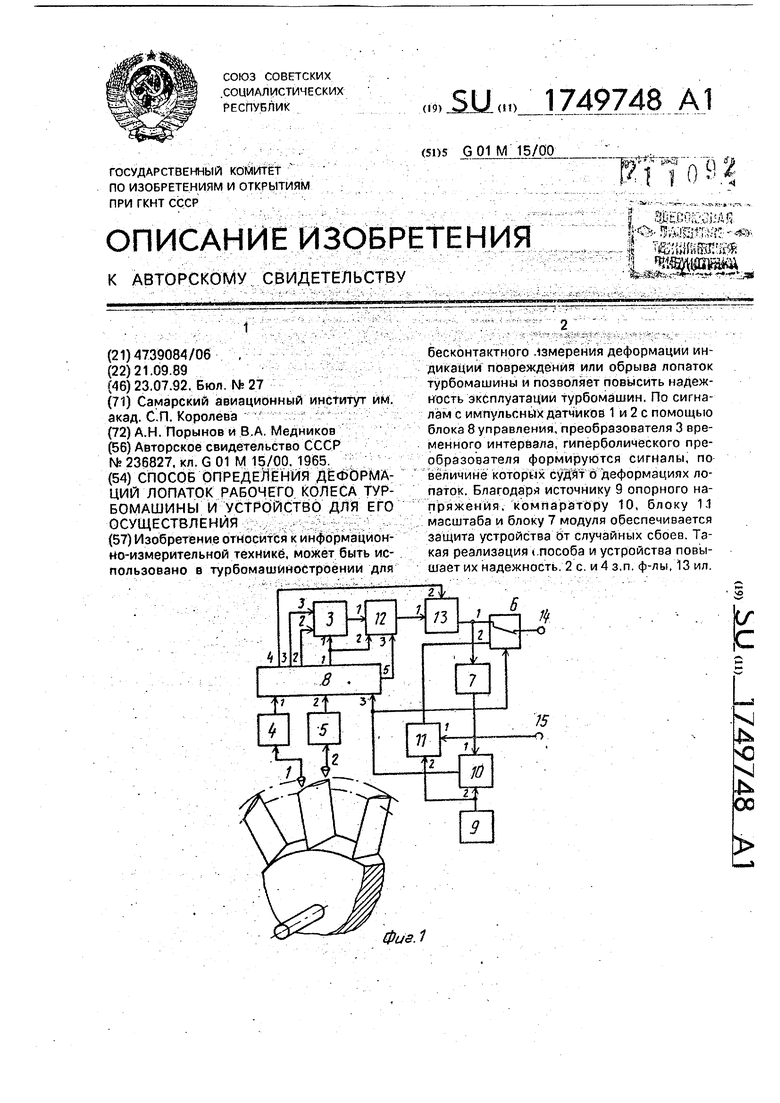
Д1изм--ЦД-,08)
где С - коэффициент пропорциональности; г - временной интервал между приходом импульсов от входной и выходной кромок лопатки, выражаемый как
(26)
Графическая ,., . зависимость У f ( тп- ) представлена на фиг. 13.
LJJoк -
Работа одного из возможных примеров реализации преобразователя 3 временного интервала, изображенного на фиг.4, заключается в следующем.
До момента t2 на первом - третьем входах блока 3 присутствуют1 напряжения уровня логической единицы (фиг. 10, графики 77, 76, 75), При этом интегратор 39, блока 3 сброшен напряжением уровня логической единицы, действующим на его втором (управляющем) входе, отчего выходное напряжение интегратора 39 и блока 3 равно нулю, а напряжение на выходе блока 36 ключей отсутствует, так как ключи 41 и 42 разомкнуты (фиг 4).
С момента i на первом и третьем входах преобразователя 3 временного интервала уровень напряжения изменяется с логической единицы н а логический нуль (фиг. 10, графики 77, 75). В результате с момента t2 кончаются условия сброса интегратора 39. Одновременно с момента t2 замыкается ключ 42 под действием напряжения уровня логической единицы, поступившего с момента t2 на его второй (управляющий) вход с выхода инвертора 44 При этом через замкнутые ключи 43 и 42 напряжение источника 38 опорного напряжения поступает с момента t2 на первый (аналоговый) вход интегратора 39, выходное напряжение которого, а также и выходное напряжение блока 3 момента t2 изменяется по линейному закону и к момент времени t4 достигает наибольшей величины, пропорциональной величине интервала времени At t4 -12.
С момента t4 на первый и третий1 входы 1 и 3 преобразователя 3 временного интервала поступают напряжения уровня логической единицы. При этом интегратор 39 сбрасывается напряжением уровня логической единицы, поступившим на его второй вход.
В случае, если на первом и втором входах блока 8 управления импульсы с выходов формирователей 4 и 5 импульсов (фиг.1) приходят во бремени (фиг. 10, графики 73, 74, моменты tn t ш) в последовательности, обратной рассмотренной, то состояние логических сигналов на втором и третьем выходах блока 8 управления меняется на противопложное в течение текущего информационного временного интервала (фиг. 10, графики 76, 75, моменты ti2 t tn). В результате с момента m напряжение уровня логического нуля формируется на первом
и втором входах блока 3 (фиг. 10, графики 77. 76). При этом ключ 41 замыкается и напряжение источника 37 опорного напряжения поступает на первый вход интегратора 39
5 через замкнутые ключи 40 и 41. Так как полярность напряжения источника 37 опорного напряжения противоположна полярности напряжения источника 38 опорного напряжения, то с момента tt2 нэпряже10 ние интегратора 39. а также и выходное напряжение блока 3 отрицательно и изменяется по линейному закону (фиг. 10, моменты 112 t t14).
Работа одного из возможных вариантов
15 реализации гиперболического преобразователя 12, изображенного на фиг.2, заключается в следующем.
До момента времени t2 на втором входе гиперболического преобразователя 12 при0 сутствует напряжение единичного уровня (фиг.8, график 54), отчего на выходе элемента 18 задержки в это время также действует v напряжение уровня логической единицы (фиг.8, график 55), а на выходе инвертора
5 19 - напряжение нулевого уровня (фиг.8. график 56). При этом триггер 12 находится во взведенном состоянии, при котором на его неинвертирующем выходе сформировано напряжение единичного уровня (фиг 8.
0 график 57, моменты t 12). которое поступает на второй управляющий ,вход запоминающего устройства 16 и удерживает его в сброшенном состоянии, которому соответствует отсутствие напряжения на выходе ус5 тройства 16 (фиг. 8. график 58 моменты t t2). Одновременно напряжение на выходе инвертора 20 сформировано на уровне логического нуля и поступает на первый вход элемента ИЛИ 23, на втором входе которого
0 действует нулевой уровень напряжения, поступающего через третий вход гиперболического преобразователя 12 с пятого выхода блока 8 управления (фиг.1). В результате на выходе элемента ИЛИ 23 сформировано на5 пряжение уровня логического нуля (фиг 8 график 59. моменты t tT). поступающее на второй вход генератора 17 гиперболических импульсов, отчего последний с момента предыдущего запуска находится в состоя0 нии формирования своего выходного гиперболического напряжения (фиг 8. (рафик 60, моменты t tT)
В момент времени t2 на втором входе гиперболического преобразователя 12 уро5 вень напряжения изменяется с единичного на нулевой (фиг.8, график 54) отчего с момента t2 триггер 21 сбрасывается напряжением уровня логической единицы поступившим на его четвертый (вход h) с выхода инвертора 19 (фиг 8 график 56, моменты t t2). В результате с момента t2 на неинвертирующем выходе триггера 21 формируется напряжение нулевого уровня, под действием которого кончаются условия сброса запоминающего устройства 16, и с момента t2 выходное напряжение последнего повторяет пилообразное напрях ение, поступающее на его первый информационный вход через первый вход преобразователя 12 (фиг,8, график 53, моменты t ta) с выхода преобразователя 3 временного интервала, так как ключ 50 блока 16 замкнут под действием напряжения единичного уровня, поступающего на его управляющий вход через третий вход блока 16 с выхода логического инвертора 19(фиг,8, график 56).
Спустя интервал времени Г3ад,отсчм- танный от момента t2 смены уровня напряжения на втором входе преобразователя 12, а следовательно, и на входе элемента 18 задержки, на выходе последнего с момента tm t2 + Тзад формируется нулевой уровень напряжения, отчего на выходе инвертора 20 с момента tm формируется напряжение единичного уровня, поступающее через элемент ИЛИ 23 (фиг.8, график 59, моменты t tm) на второй (управляющий) вход генератора 17 гиперболических импульсов. При этом с момента tm генератор 17 гиперболических импульсов переходит в режим отслеживания выходного напряжения запбминающего устройства 16 (фиг.8, график 60, моменты t tm).
В момент t4 уровень напряжения на втором входе гиперболического преобразователя 12 изменяется с нулевого на единичный (фиг.8, график 54). Одновременно сбрасывается до нулевого уровня линейно изменяющееся напряжение на первом входе преобразователя 12 (фиг.8, график 53, момент t), а следовательно, и напряжение . на первом входе запоминающего устройст- оа16.
Так как с момента t4 на третьем входе запоминающего устройства 16 действует напряжение нулевого уровня с выхода инвертора 19. то ключ 50 блока 16 размыкается, и выходное напряжение запоминающего устройства 16 и выходное напряжение генератора 17 гиперболических импульсов с момента t4 остается неизменным (фиг.8, графики 58,60, моменты t4 t ts) до момента ts ввода триггера 21 фронтом сформированного напряжения единичного уровня, поступающего с момента ts на третий вход С синхронизации триггера 21 с выхода элемента 18 задержки (фиг.8, график 55, момент t ts), При этом с момента ts на выходе
инвертора 20, а следовательно, и на выходе элемента ИЛИ 23 формируется напряжение нулевого уровня, в результате чего нулевым напряжением, действующего на втором входе генератора 17 гиперболических импульсов, последний с момента времени ts t4 + + зад запускается, формируя на своем выходе функциональную (гиперболическую) зависимость, описываемую выражением(6).
0 Работа одного из возможных вариантов реализации блока 8 управления, изображенного на фиг.З, заключается в следующем.
В момент времени, например, t te,
5 предшествующий приходу импульсов на первый и второй входы блока 8, на этих входах присутствуют напряжения уровня логической единицы (фиг.9, графики 61, 62), отчего на выходе элемента 31 блока Вуправ0 ленил сформировало напряжение уровня логического нуля (фиг.9, график 70). При этом триггеры 35 и 24 блока 8 находятся в сброшенном состоянии, которому соответствует нулевой уровень напряжения на их
5 выходах (фиг.9, графики 63, бХ моменты t te). В результате на выходах элементов И- НЕ 26 и 27, а также на выходе элемента И 29 присутствуют напряжения высокого уровня (логической единицы) (фиг.9, графики 67, 66,
0 68) На выходе элемента И 32, а следовательно, и ни пятом выходе блока 8 управления сформировано напряжение нулевого уровня, так как на его третьем входе присутствует нулевое напряжение, поступающее на
5 первый вход элемента И 32.
Работу блока 8 управления можно представить с начала любого цикла его текущей работы во времени, например с момента времени te.
0 В моменты времени te и ta соответственно, первого и второго входов блока 8 управления поступают импульсы напряжения уровня логического нуля на входы элемента И-НЕ 28 и на С-входы триггеров 35 и 24,
5 соответственно (фиг.9. графики 61, 62) Причем первым во времени следует импульс с первого входа блока 8 управления.
При этом на инверсном выходе элемента И-НЕ 28 последовательно ео времени
0 формируются два импульса уровня логической единицы (фиг,9, график 69), следующие синхронно во времени с импульсами на первом и втором входах этого элемента. В ответ на первый из названных импульсов, посту5 пивший с выхода элемента И-НЕ 28 на первый вход элемента И 31, на выходе последнего, а следовательно, и на четвертом выходе блока 8 формируется с момента to импульс напряжения уровня логической единицы (иг.9, график 70), момент t окончания которого обусловлен моментом t окончания первого импульса из двух, действующих на первом входе элемента И 31.
В момент t триггер 35 взводится фронтом инвертированного импульса, поступившего на его С-вход синхронизации, отчего на прямом выходе триггера 35 с момента t формируется напряжение уровня логической единицы (фиг.9, график 63), поступающее на первые входы элемента И-НЕ 27 и элемента И 30. Так как на втором входе элемента И-НЕ 27 в это время действует напряжение уровня логической единицы, то с момента t на инверсном выходе элемента И 27 формируется напряжение нулевого уровня (фиг.9, график 66), поступающее на третий выход блока 8 и на первый вход элемента И 29. В результате fia выходе элемента И 29 формируется напряжение нулевого уровня (фиг 9, график 68), поступающее на первый выход блока 8 управления.
В момент tg окончания инвертированного импульса на С-входе триггера 24 (фиг.9 график 62) последний взводится фронтом этого импульса, отчего на его прямом выходе с момента tg формируется напряжение уровня логической единицы (фиг 9, график 64, момент tg, поступающее на первый вход элемента И-НЕ 26 и на второй вход элемента И 30) В результате в момент tg на выходе элемента И 30 формируется импульс напряжения уровня логической единицы (фиг 9, график 65), который поступает на второй вход элемента ИЛИ 33 При этом сформированный импульс напряжения уровня логической единицы с выхода элемента ИЛИ 33 воздействует в момент tg на входы R триггеров 35 и 24 отчего последние сбрасываются и на их прямых выходах с моментами формируются напряжения нулевого уровня-(фиг 9 графики 63, 64) При этом на инверсном выходе элемента И-НЕ 27 с момента tg формируется напряжение уровня логической единицы, поступающее на первый вход элемента И 29 Так как в это время на втором входе последнего присутствует напряжение уровня логической единицы с выхода элемента И-НЕ 26, то в результате на выходе элемента И 29 с момента tg формируется высокий уровень напряжения (логической единицы) (фиг 9, график 68) поступающий на первый выход блока 8 управления
В моменты времени tn и tia с второго и
sSЈ,S LS3 Јi-55S -s
первого входов, соответственно, блока 8 упjseraisdjE-a.fe, Tft itrrtSffifE,- равления поступает новая пара инвертированных импульсов напряжения уровня логической единицы (фиг 9, графики 62, 61). Причем первым во времени слеДуе т импульс с второго входа блока 8, При этом работа блока 8 в основном лоеторяётбя.
Первый из названной пары следующих во времени импульсов поступает в момент tn на С-вход триггера 24 (фиг 9 график 62) При этом последний взводится в момент ц 5 фронтом этого инвертированного импульса напряжение уровня логической единицы сформированное с момента ti2 на его прямом выходе (фиг 9. график 64), поступает на первый вход элемента И-НЕ 26 и второй 0 вход элемента И 30.
Так как на втором входе элемента И- НЕ 26 в это время действует напряжение уровня логической единицы, то с момента ti2 на инверсном выходе элемента И-НЕ 26 фор
5 мируется напряжение уровня логического нуля (фиг 9 график 67), поступающее на второй вход блока 8 управления и на второй вход элемента И 29. В результате на выходе элемента И 29 с момента ti2 формируется
0 напряжение уровня логического нуля (фиг 9 график 68), поступающее на первый выход блока 8 управления
В момент ti4 окончания действия инвертированного импульса на С-входе триггера
5 35 последний взводится в момент tn фронтом этого импульса отчего на его прямом выходе с момента ti4 формируется напряже ние уровня логической единицы (фиг 9 график 63. момент ) поступающее на первые
0 входы элемента И НЕ 27 и элемента И 30х При этом в момент tn на выходе элемента И 30 формируется импульс напряжения уровня логической единицы Сформированный на выходе элемента ИЛИ 33 импульс воз5 действует в момент ш на входы R триггеров 35 и 24, отчего последние сбрасываются и на их прямых выходах с момента tm формируется напряжение нулевого уровня (фиг 9 график 63 64)
0 Кроме измерения кручения лопаток (при котором оба импульсных датчика 1 и 2 выполняют функцию периферийных и размещены согласно фиг 1) предлагаемый способ и устройство для его осуществления могут
5 применяться также и при измерении изгиба лопаток и их разношагицы
При измерении изгиба лопаток импульсный датчик 2 выполняет функцию периферийного и установлен над средней частью
0 хорды периферийного сечения концевых кромок лопаток а импульсный датчик 1 выполняет функцию корневого датчика установлен под или над корневым и штифтами (либо напротив корневых рисок) лопаток и
5 расположен с датчиком 2 в одной плоскости перпендикулярной плоскости вращения колеса турбомашины и проходящей через центральную ось ее вала (фиг 6)
При измерении разношагицы лопаток импульсные датчики 1 и 2 выполняют функцию периферийных и установлены над средней частью хорды периферийного сечения концеаых кромок лопаток с шагом, равным длине окружности, проходящей в плоскости вращения колеса через концевые торцы им- пульсных датчиков, поделенной на число лопаток лопаточного венца (фиг,7), Устройство обладает широкой областью применения, начиная от использования в стендовых испытаниях турбомашин и кончая бортовым вариантом исполнения, не требующи згпри эксплуатации вмешательства оператора из- за работоспособности без предварительных команд и установок после включения питающего напряжения. Так, после включе- ния питания, либо после случайного сбоя в работе предлагаемое устройство автоматически восстанавливает свою работоспособность максимум после двух импульсов, поступивших с любого из импульсных дат- чиков.
По названным причинам возможны два варианта сбойных ситуаций, заключающихся в произвольном взводе одного из двух триггеров блока 8 управления: либо во взво- де триггера 35 при сброшенном триггере 24. либо во взводе триггера 24 при сброшенном триггере 35.
Если при подключении питающего напряжения к устройству в момент to триггер 24 блока 8 управления оказался сброшенным (фиг.11. график 86). а триггер 35оказался взведенным с момента ь (фиг.11. график 85). Допустим, что с выхода формирователя 4 импульсов ка первый вход блока 8 управ- ления в момент tn поступил инвертированный пульс (фиг. 11, график 8), являющийся во времени вторым из пары импульсов, приходящихся в каждом цикле измерения на первый и второй входы блока 8 управления.
Под действием напряжения единичного уровня, сформированного с момента to на прямом выходе триггера 35 {фиг.11, график 85) блока 8 управления (фиг.З), на инвертирующих выходах элементов М-НЕ 27 и 26 формируются с момента to напряжения соответственно логического нуля и логической единицы, которые через соответственно третий выход блока 8 управления (фиг, 11. график 87) и его второй выход (фиг.11, гра- фик 88) поступают на третий и второй входы преобразователя 3 временного интервала. Напряжение нулевого уровня с выхода элемента L1-HE 27 (фиг.З) поступает также на первый вход элемента 14 29, отчего на его выходе и на первом выходе блока 8 управления с момента to формируется нулевой уровень напряжения (фмг.11. график 89), поступающий на первый вход преобразователя 3 временного интервала и на второй вход
гиперболического преобразователя 12 (фиг.1). В результате с момента to на выходе преобразователя 3 временного интервала формируется линейно изменяющееся напряжение, отслеживаемое с этого момента гиперболическим преобразователем 12 (фиг.11, график 91, U(12), моменты to t tj). Инвертированный импульс, поступивший с момента tn с первого входа блока 8 управления на вход С синхронизации триггера 35, не меняет его взведенного состояния (фиг.11, график 85).
В момент времени t с второго входа блока 8 управления поступает инвертированный импульс (фиг 11, график 84). Под действием фронта этого импульса, действующего в момент tg на входе С синхронизации триггера 24 (фиг.З). последний взводится, отчего на его прямом выходе в момент t уровень напряжения изменяется с нулевого на единичный (фиг.11. график 86), поступающий на второй вход элемента И 30, на первом входе которого действует в это время единичное напряжение с прямого выхода триггера 35 (фиг.11. график 85). При этом на выходе элемента И 30 в момент формируется импульс напряжения единичного уровня, который через элемент ИЛИ 33 поступает на входы сброса R триггеров 24 и 35. сбрасывая их. В результате на выходах триггеров 35 и24 формируются напряжения уровня логического нуля, на выходах элементов И-НЕ 27 и И 29, а, соответственно, и на третьем и первом выходах блока 8 управления формируются, напряжения единичного уровня (фиг.11. графики 87, 89. момент tjj).
Под действием напряжения единичного уровня, поступившего с момента & на первый и второй входы соответственно преобразователя 3 временного интервала и гиперболического преобразователя 12 (фиг.1), выходное напряжение блока 3 сбрасывается до нулевого уровня, а гиперболический преобразователь 12 с момента ta запускается, формируя на своем выходе до
момента t
I
неизменное по величине напряжение, равное напряжению, сформированному на его выходе к моменту tjj (фиг.11, график 91,1)(12}вых, моменты t/1 t).
С момента t tj+ т3ад выходное напряжение гиперболического преобразователя 12 изменяется по гиперболическому закону (фиг.11, график 91, моменты ц t tv).
Одновременно с момента t| выходное напряжение запоминающего устройства 16, «входящего в преобразователь 12, падает до нуля под действием напряжения единичного уровня, поступившего с момента tc на второй вход сброса блока 16с немнвертмрующего выхода триггера 21 в результате его взвода фронтом импульса напряжения, поступившего в момент t ( на С-вход синхронизации триггера 21 с выхода элемента 18 задержки (фиг.З).
В момент ti с первого входа блока 8 управления поступает инвертированный импульс напряжения нулевого уровня на первый вход элемента Й-НЕ 28 (фиг 3), на выходе которого с момента t( формируется импульс напряжения единичного уровня, поступающий на первый вход элемента И 31. Так как в это время на втором входе последнего действует единичное напряжение с выхода элемента И 29, поступающее также на первый выход блока 8 управления (фиг.11, график 89), то на выходе элемента И 31 с момента ti формируется импульс напряжения единичного уровня, поступающий через четвертый выход блока 8 управления {фиг.11, график 90, момент ti) на второй уп- равляющий вход блока 13 выборки-хранения, который выбирает поступающее на его первый информационный вход выходное напряжение гиперболического преобразователя 12.
Напряжение с выхода блока 13 выборки-хранения, равное выбираемому, поступает также через блок 7 модуля на первый вход блока 11 масштаба и на первый вход компаратора 10, на втором входе которого действует напряжение опорного уровня Uon с выхода источника 10 опорного напряжения (фиг 1)
Так как напряжение, выбираемое блоком 13 выборки-хранения а следовательно, и его выходное напряжение в момент ti превышает по величине опорный уровень Don (фиг. 11, график 91, момент ti), то с этого момента на выходе компаратора 10 формируется напряжение единичного уровня (фиг 11, график 94, моменты t, t tH), поступающее на первые входы элементов ИЛИ 33 и И 32 блока 8 управления (фиг 3) через его третий вход и на третий управляющий вход двухпозиционного ключа б отчего послед- ний переводится в противоположное рабочее состояние, при котором с момента ti его выход замыкается с его вторым информационным входом, подключая к ыходной шине 14 устройства во ходное8ТЙ г1 яже н5 В лока 11 масштаба (фиг 11 график 93, U(14), моменты t TI, определяемое выражением
U{M) U(ii) КСж(и - Uon) + Uon. (28) где U{) - величина выходного напряжения блока 7 модуля,
U(on) величина выходного напряжения источника 9 опорного напряжения;
Ксж - константа, выбираемая из условия К I и определяемая величиной коэффициента деления делителя 47 блока 11 магшта ба (фиг.5).
При этом величина напряжения, посту лающая с выхода блока 13 выборки хранения через блок 7 модуля на выходную шину 15,равна
U(15) U(7)-Il- --°-n- ьи„п. (29)
Подача напряжения на выходную шину 14 через блок 11 масштаба позволяет в условиях ограниченного динамического диапазона канала связи передавать в него с выходной шины 14 устройства смасштаби рованные напряжения большой величины формируемые при сбойной ситуации на выходе гиперболического преобразователя 12 (фи 11, график 91) и выбираемые с его вы хода блоком 13 выборки-хранения в моменты времени ti t
С момента tv на выходе элемента И 31 блока 8 формируется напряжение нулевого уровня (фиг 11 график 90), отчего на выходе инвертора 34 (фиг 3) с этого момента време ни формируется напряжение уровня логической единицы поступающее на второй вход элемента И 32, отчего на его выходе с момента tv формируется напряжение единичного уровня, поступающее через пятый выход блока 8 управления (фиг 11 график 92, моменты t tv) на третий вход гиперболического преобразователя 12 с которого оно поступает на вход S раздельной установки в состояние логической единицы триггера 21 (фиг 2) подтверждая его озве- денное состояние а следовательно и сбро- шенное состояние запоминающею устройства 16 Одновременно напряжение единичного уровня с третьего входа преобразователя 12 поступает через элемент ИЛИ 23 на второй управляющий вход генератора 17 гиперболических импульсов, который под его действием отслеживает с момента tv нулевое напряжение на выходе запоминающего устройства 16 сформированное в результате его предшествующего сброса В результате выходное напряжение гиперболического преобразователя 12 с момента ь падает до нуля (фиг 11, график 91, моменты t tv)
С момента времени tv окончания действия импульса на втором управляющем входе блока 13 выборки-хранения напряженно на его выходе а также на выходных шинах 15 и 14, остается неизменным во времени (фиг 11 графики 93. 95 моменты tv t t()
и (14 и Ms
I ) I tv t 14 U ( 11 ) t tv 1 t,(
i) i Jv t tH I U(5) I iv l U, Г J
В момент времени tn на второй управляющий вход блока 13 выборки-хранения приходит очередной управляющий импульс При этом с момента tH блок 13 выборки-хранения выбирает с выхода гиперболического преобразователя 12 нулевое напряжение которое с выхода блока 13 проходит через блок 7 модуля на первый вход компаратора 10. При этом с момента t на выходе компаратора 10 формируется напряжение нулевого уровня поступающее на третий управляющий вход двухпозиционного ключа б и на третий вход блока 8 управления В результате на выходе элемента И 32 блока 8 управления формируется напряжение уровня логического нуля, поступающее через пятый выход блока 8 управления на третий - входгиперболического преобразователя 12, отчего с момента tn снимаются условия взвода с триггера 21 (так как на его S-входе раздельной установки в состояние логической единицы с момента тн де йствует нулевой уровень напряжения) а следовательно, и снимаются условия сброса запоминающего устройства 16 Одновременно снимаются условий отслеживания генератором 17 гиперботических импульсов выходного напряжения блока 16. так как на втором входе блока 17 с момента tH действует нулевой уровень напряжения с выхода элемента ИЛИ 23 (фиг 2)
Под действием нулевого уровня напряжения н третьем входе двухпозиционного ключа б, поступившего с выхода компаратора 10, двухпозиционный ключ б переключается с момента tn в противоположное исходное состояние, при котором его выход скоммутирован с его первым информационным входом При этом с момента tn выходная шина 14 соединяется с выходом блока 13 выборки-хранения и его выходное нулевое напряжение с момента t() поступает на выходную шину 14 (фиг 11, график 93 моменты t н) и одновременно через блок 7 модуля на выходную шину 15 (фиг 11, график 95, моменты t tH)
Импульс напряжения, получаемый с выходной шины 14 в интервале времени (фиг.11, график 93, моменты t) t l) и с выходной шины 15 (фиг 11 график 95, моменты ti S t- IH), позволяет однозначно выделять сбойную ситуацию и определять момент выхода устройства на режим измерений как при подключении устройства к питающей сети, так и во время работы
Таким образом, в момент tH действия спада инвертированного импульса поступившего на первый вход блока 8 управления (фиг.11, график 83, момент tn) устройство полностью восстанавливает свою работоспособность что характеризуется сброшенным состоянием триггеров 35 и 24 блока 8 управления, и с момента ti действия фронта этого инвертированного импульса (фиг 11
график 83, момент ti) начинается цикл измерения деформаций лопаток представленный на диаграммах напряжений (фиг 11, моменты t ti), а также на диаграммах напряжений, изображенных на фиг 10
На диаграммах на фиг 12 отражена работа устройства при восстановлении его работоспособности после включения напряжения питания в момент t0 либо после случайного сбоя в работе при ситуации
самопроизвольного взвода с момента t0 триггера 24 при сброшенном состоянии триггера 35 Работа устройства в этом случае аналогична описанной с небольшими отличиями, заключающимися в формировании выходного напряжения гиперболического преобразователя 12 с момента to в области отрицательных значений Как следует из диаграмм на фиг 12 устройство к моменту tn также автоматически восстанавливает свою работоспособность
Таким образом, способ обеспечивает более высокую точность измерения абсолютных деформаций лопаток рабочего колеса турбомашины, так как при одинаковой с
известным способом относительной ошибке определения величины информационного временного интервала он не требует смещения периферийных датчиков на величину расстояния равную сумме двух величин, первая из которых определена максимальной амплитудой колебаний конс,а лопатки а вторая - максимальной амплитудой разброса исходных положений лопаток Это приводит к повышению точности способа как минимум в два раза по отношению к известному способу Абсолютную погрешность предлагаемого способа Лп с можно определить через относительно приведенную погрешность б как
Ai с 6 (Акл + Эр уст )
(32)
где АКЯ - максимальная амплитуда колебаний концов лопаток;
Эр уст - максимальная амплитуда рэз- бросэ установки исходных положений лопаток)
тогда погрешность известного способа определится как
Дпрот д (Sc. + Акл + ар уст), (33)
где So - величина смещения периферийных датчиков, выбираемая из условий
So 5: Акл i ар уст(34)
С учетом величины So выражение для погрешности известного сТТбсобэ примет вид
Л прот. 2 д (Акл. + .);(35)
Апрот. 5:2 Дп.с-(36)
В сравнении с Ы$Ш тфщуг ё- м ы и сп осо б обладает мШ€ ШШ структур ной (операционной) ел ожн6с 07Ґ§к Ш ляёт определять кеф&р ШШШк. рабочего колеса турбомашШы без наличия операции задержки сигналов одного из периферийных либо корневого датчиков на величину не менее времени прохождения концом лопатки в плоскости вращения колеса расстояния, равного сумме двух расстояний, первое из котб р ьгх 5тгр ед елено величиной максимальной амплитуды колебаний концы лопатки, а втброе - максимальной амплитудой разброса исходных положений лопаток, а также позволяет определить деформации лопаток рабочего ко- леса безналичия операции
масштабирования результатов измерения. что свойственно известйбму сгТособу.
Кроме того, более высокая точность устройства обеспечивается также тем, что оно выполняет свои функции без наличия в составе цепей управления работой преобразователя временных интервалов линии задержки, присущей ИЗвёс тнбМу устройству, нестабильность параметров которой обуславливает снижение точности измерения.
Работа способа и реализующего его устройства без наличия регулируемой задержки сигнало&одногоиз периферийных либо корневого датчиков позволяет обеспечить более высокое быстродействие на переходных режимах по отнош енйкГк известному техническому решению.
Устройство более надежно Но сравнению с известным устройством, так как производит измерение и регистрацию Деформаций лопаток рабочего колеса турбомашины без применения электронно-лучевых трубок - вакуумных приборов с малым ресурсом работы.
Снижение трудоемкости, сложности и повышение оперативности регистрации результатов измерения а предлагаемомтехни- ч е с к о м р е ш е н и и 7.pSe с п е ч ив a etc я
возможностью автоматической записного выходной информации If а4 Шгкйт Ше и гие носители информации с помощью соответствующих устройств {магнитофонов, самописцев, шлейфовых сцймог фов) на всех режимах работы турбомашины в процессе испытаний.
Снижение сложности Й трудШмкосш анализа результатов Шм енТпЯШс гаёт- ся в предложенном техническом решении
за счет упрощения автоматизированной вторичной обработки полученных с его помощью результатов измерения, так как представление выходной информации в 5 предлагаемом техническим решении в ана- : логовом или цифровом виде (в виде напряжбний или кодов) позволяет вводить ее (выходную информацию) непосредственно на входы электронных устройств (соответ10 ственно, аналоговых или цифровых), производящих ее дополнительную вторичную обработку, в отличие от известного технического решения, в котором для проведения последующей автоматизированной обра15 ботки результатов измерения требуется длительный и трудоёмкий процесс их преобразования к еиду, удобному для ввода в анализирующее устройство вторичной обработки сигналов,
0 Формула изобретения
0 очередности прихода импульсов от первого и второго датчиков положения лопаток, участвующих в формировании границ соответствующих информационных временных интервалов, зафиксированные значения на5 пряжений или цифровых кодов с моментов окончания текущих информационных временных интервалов Изменяют во времени по закону аппроксимирующему гиперболический, по величине Этих напряжений или
0 цифровых кодов в моменты времени начала
ч; пбслёдУющйх рчёредных временных интервалов судят о деформации соответствующих .лопаток.
проходящих под ними лопаток, преобразователь временного интервала, первый и второй формирователи импульсов, входы которых подключены к выходам первого и второго импульсных датчиков, отличаю- щ е е с я тем, что, с целью повышения надежности, оно дополнительно содержит двухпозиционный ключ, блок модуля, блок управления, источник опорного напряжения, компаратор, блок масштаба, гипербо- лический преобразователь, блок выборки-хранения, первую и вторую выходную шины, выходы первого и второго формирователей импульсов подключены соответственно к первому и второму рходам блока управления, выход преобразователя временного интервала подключен к первому входу гиперболического преобразователя, выход которого подключен к первому входу блока выборки-хранения, выход кото- рого подключен к первому входу двухпози- ционного ключа и входу блока модуля, выход которого подключен к второй выходной шине и первым входам компаратора и блока масштаба, вторые входы которых под- ключены к выходу источника опорного напряжения, выход блока масштаба подключен к второму входу двухпозиционо- го ключа, выход которого подключен к первой выходной шине, выход компаратора подключен к третьим входам двухпозициои- ного ключа и блока управления, первый выход последнего подключен к первому и второму входам соответственно преобразователя временного интервала и гиперболи- ческого преобразователя, второй и третий выходы - к второму и третьему входам преобразователя временного интервала, четвертый выход -к второму входу блока выборки-хранения, а пятый выход - к треть- ему входу гиперболического преобразователя,
первого триггера подключены к пятому выходу блока управления, первый выход которого подключен к входам первого инвертора и элемента задержки, выход первого генератора логической единицы подключен к второму входу.первого триггера, выход элемента задержки подключен к входу второго инвертора и третьему входу первого триггера, четвертый вход которого подключен к выходу первого инвертора.
выход которого подключен к второму входу второго Ключа, третий выход блока управления подключен к второму Авходу первого ключа и входу четвертого инвертора, выход которого подключен к второму входу третьего ключа.
б. Устройство по п.2, отличающееся тем, что блок масштаба содержит сумма- тор, делитель, аналоговый, инвертор и второй сумматор, первый вход которого подключен к выходу блока модуля, выход - к входу делителя, а второй вход - к выходу аналогового инвертора, вход которого и первый вход первого сумматора подключены к аыходу источника опорного напряжения, второй вход первого сумматора подключен к выходу делителя, а его выход- к: Bfopoiyiy входу двухпозйционного ключа.
ФигА
Фи.5
Фиг. 6
Фиг. 7
вели
09 % / /у
.6l7it
да
да
/;л
;л
. ft, 5
Ч Ч
Ч it tfO 9 t}1 iff its
v 1зЧг к
Фиг, 10
Фиг/f
ts mt /
V tp i % fy
ФигМ
i
AAl
Шо
о/ /о
| ЭЛЕКТРОННОЛУЧЕВОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИЙ ЛОПАТОК РАБОЧЕГО КОЛЕСА ТУРБОМАШИНЫ«ЭЛУРА» | 0 |
|
SU236827A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приводный механизм в судовой турбинной установке с зубчатой передачей | 1925 |
|
SU1965A1 |
