Изобретение относится к машиностроению, в частности к устройствам для выполнения вспомогательных операций связанных с изменением положения деталей в пространстве, а конкретнее к схватам манипуляторов.
Известен схват манипулятора, содержащий корпус и оболочку, заполненную рабочим телом.
Недостатком этого схвата является низкая надежность захвата.
Наиболее близким по технической сущности к предлагаемому является схват манипулятора, содержащий корпус, оболочку, заполненную рабочей средой, и обмотку управления.
Недостатком этого устройства является его сложность, а также низкая эксплуатационная надежность, обусловленная наличием оболочки.
Целью изобретения является упрощение конструкции
Поставленная цель достигается тем, что схват манипулятора содержащий полый цилиндрический корпус выполненный из немагнитного материала, электрическую обмотку установленную на корпусе, и захватный элемент, выполненный в виде упругой оболочки, расположенной на внутренней боковой поверхности корпуса, имеет упомянутую оболочку выполненной из магнитопроводной резины, при этом для повышения надежности схвата манипулятора по периметру оболочки на ее торцевых поверхностях выполнены выступы расположенные вдоль продольной оси схвата
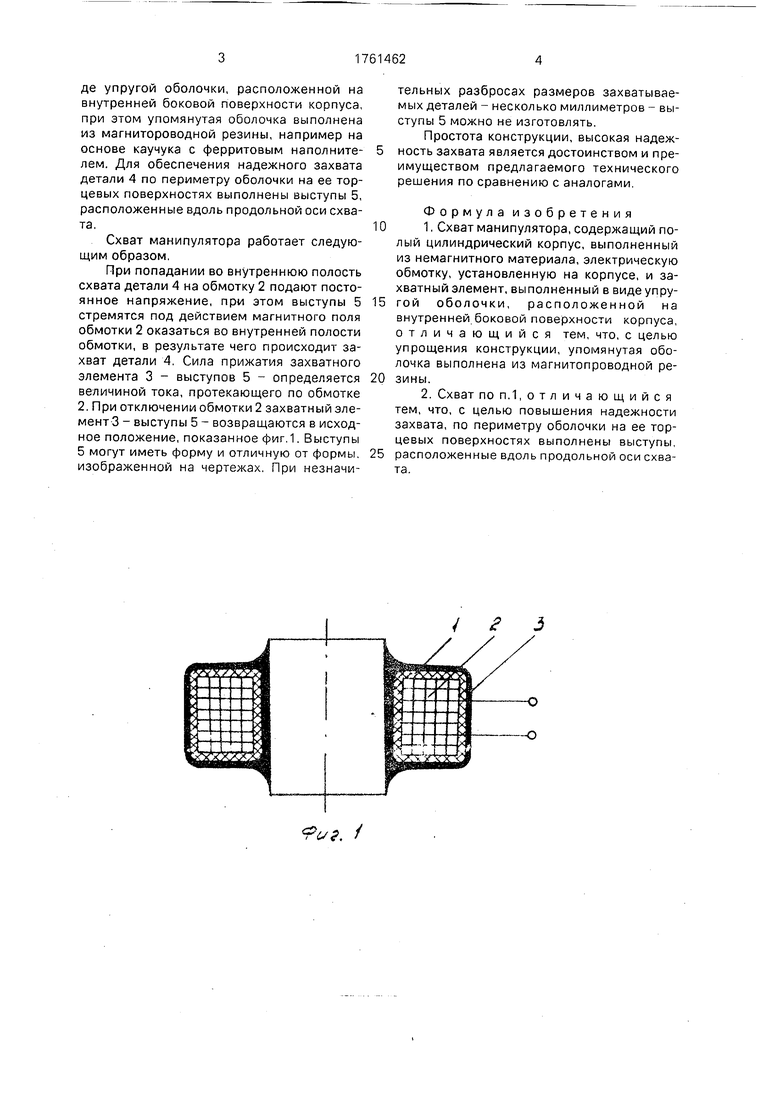
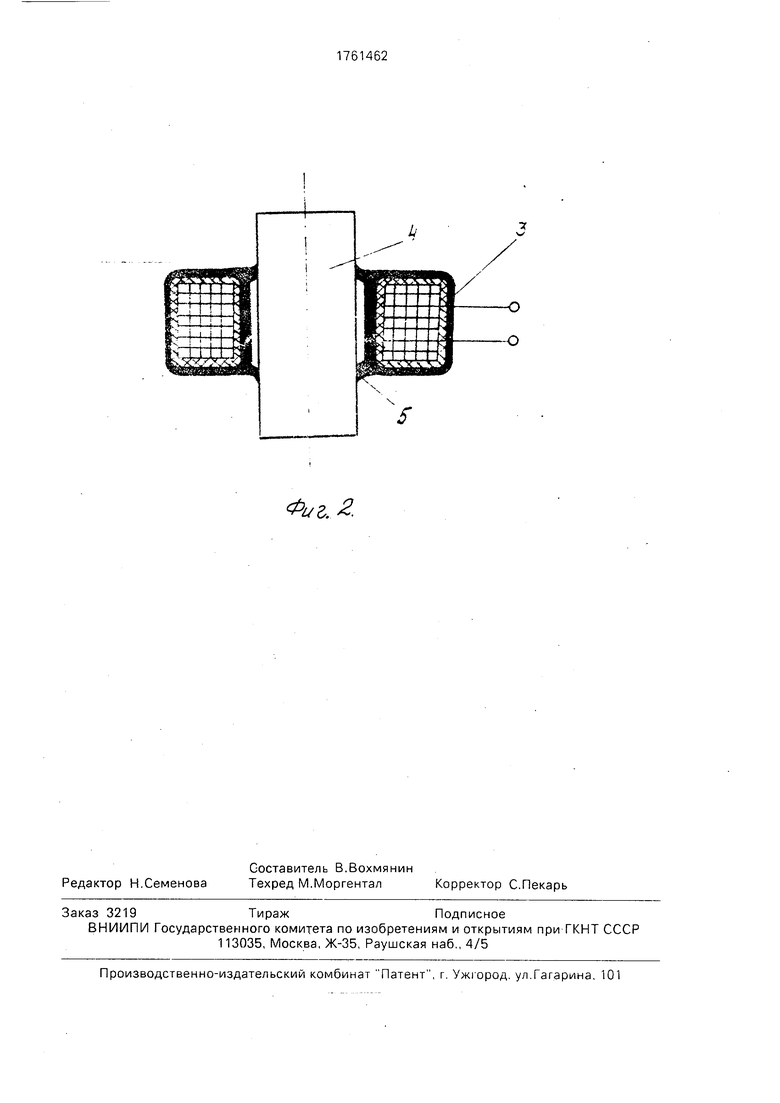
На фиг 1 показан схват манипулятора с обесточенной обмоткой на фиг 2 - то же, с захваченной деталью
Схват манипулятора содержит полый цилиндрический корпус 1 выполненный из немагнитного материала, в виде тора с размещенной внутри электрической обмоткой 2, захватный элемент 3, выполненный в ви(Л
С
vi о
Ј
Os
ю
де упругой оболочки, расположенной на внутренней боковой поверхности корпуса, при этом упомянутая оболочка выполнена из магнитороводной резины, например на основе каучука с ферритовым наполните- лем. Для обеспечения надежного захвата детали 4 по периметру оболочки на ее торцевых поверхностях выполнены выступы 5, расположенные вдоль продольной оси схва- та.
Схват манипулятора работает следующим образом,
При попадании во внутреннюю полость схвата детали 4 на обмотку 2 подают постоянное напряжение, при этом выступы 5 стремятся под действием магнитного поля обмотки 2 оказаться во внутренней полости обмотки, в результате чего происходит захват детали 4. Сила прижатия захватного элемента 3 - выступов 5 - определяется величиной тока, протекающего по обмотке 2. При отключении обмотки 2 захватный элемент 3 - выступы 5 - возвращаются в исходное положение, показанное фиг.1. Выступы 5 могут иметь форму и отличную от формы. изображенной на чертежах. При незначительных разбросах размеров захватываемых деталей - несколько миллиметров - выступы 5 можно не изготовлять.
Простота конструкции, высокая надежность захвата является достоинством и преимуществом предлагаемого технического решения по сравнению с аналогами
Формула изобретения
1,Схват манипулятора, содержащий полый цилиндрический корпус, выполненный из немагнитного материала, электрическую обмотку, установленную на корпусе, и захватный элемент, выполненный в виде упругой оболочки, расположенной на внутренней боковой поверхности корпуса, отличающийся тем, что, с целью упрощения конструкции, упомянутая оболочка выполнена из магнитопроводной резины.
2.Схват по п.1,отличающийся тем, что, с целью повышения надежности захвата, по периметру оболочки на ее торцевых поверхностях выполнены выступы, расположенные вдоль продольной оси схвата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора В.Г.Вохмянина | 1990 |
|
SU1761461A1 |
| Схват манипулятора В.Г.Вохмянина | 1990 |
|
SU1764991A1 |
| Схват промышленного робота В.Г.Вохмянина | 1990 |
|
SU1756144A1 |
| Схват манипулятора | 1985 |
|
SU1276486A1 |
| Схват манипулятора В.Г.Вохмянина | 1988 |
|
SU1627402A1 |
| Схват манипулятора | 1987 |
|
SU1463478A2 |
| Схват манипулятора | 1985 |
|
SU1321583A1 |
| Схват манипулятора В.Г.Вохмянина | 1986 |
|
SU1366394A1 |
| Захватное устройство | 1990 |
|
SU1775290A1 |
| Схват манипулятора В.Г.Вохмянина | 1990 |
|
SU1764992A1 |
Использование: машиностроение в захватных органах манипуляторов. Сущность изобретения: схват содержит полый цилиндрический корпус из немагнитного материала, электрическую обмотку и захватный элемент Электрическая обмотка установлена на корпусе, а захватный элемент расположен на внутренней боковой поверхности корпуса и выполнен в виде упругой оболочки из магнитопроводной резины По периметру оболочки на ее торцевых поверхностях выполнены выступы, расположенные вдоль продольной оси схвата. Для захвата детали на обмотку подают питание. При этом выступы под действием магнитного поля обмотки втягиваются в ее внутреннюю полость и зажимают деталь 1 з п ф-лы, 2 ил.
V9. 1
/ Ј
-О
Фиг. Я
-О
S
| Схват манипулятора | 1985 |
|
SU1276486A1 |
