X СЛ О ICO 00
Изобретение относится к устройствам для жидкостной обработки изделий в автоматизированных линиях.
Цель изобретения - повышение производительности труда.
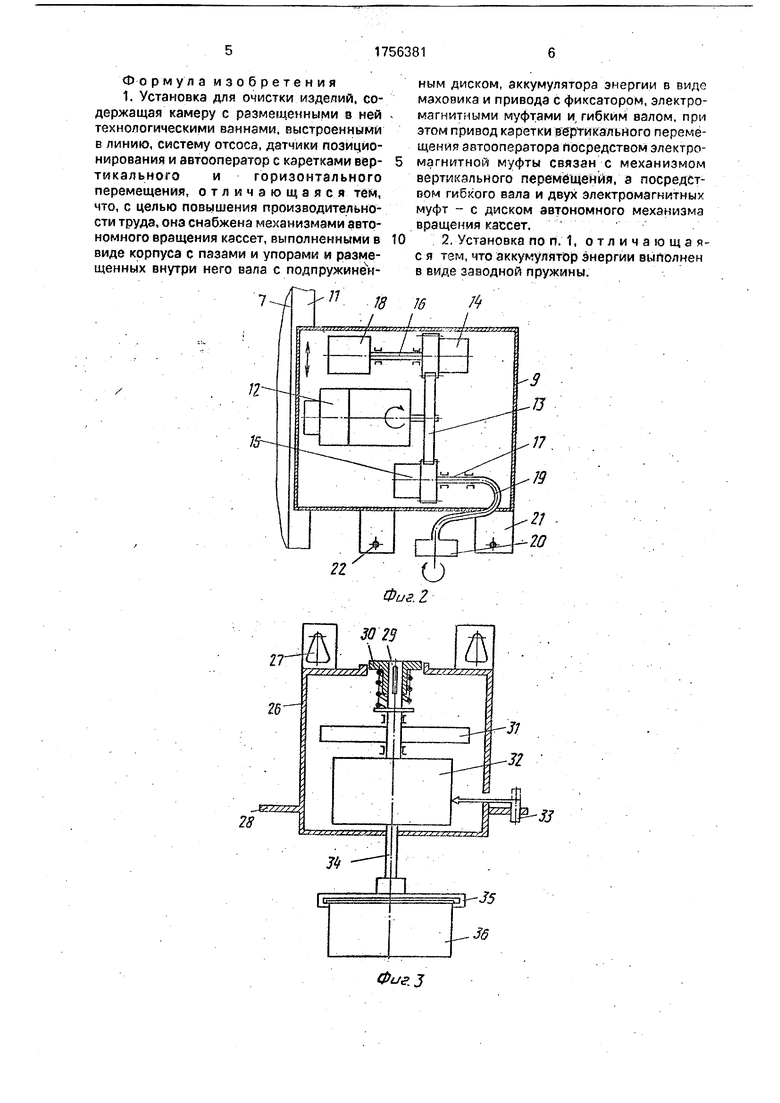
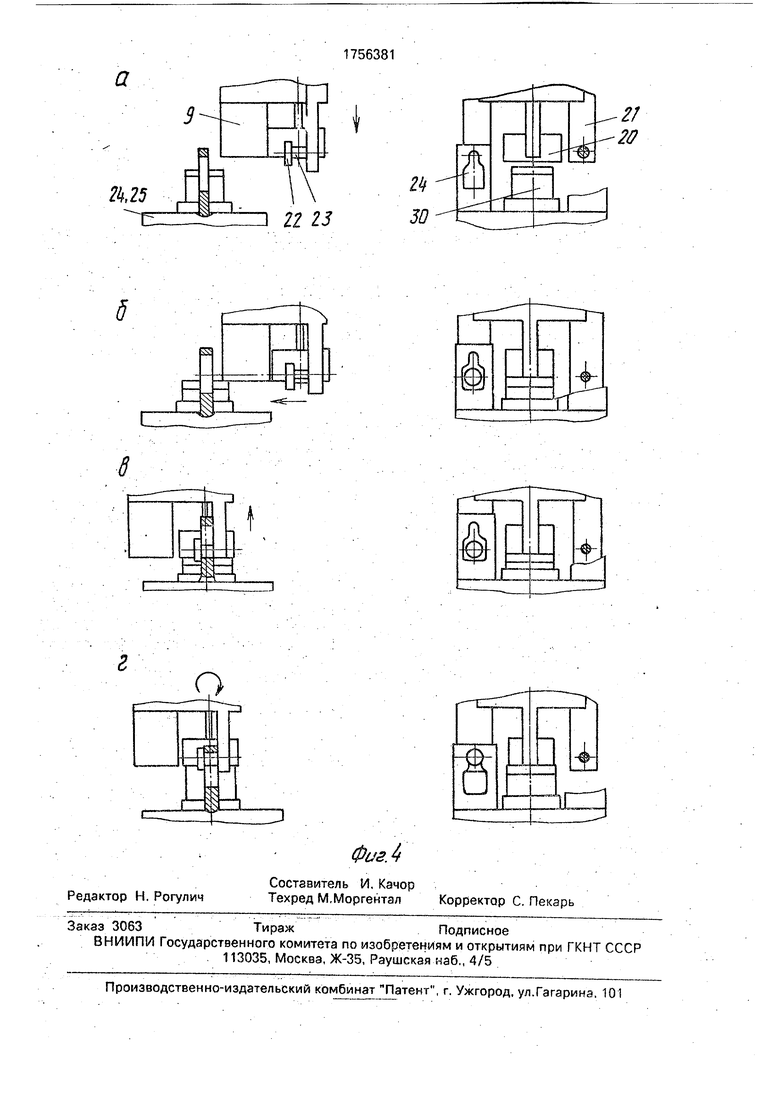
На фиг. 1 показана установка, общий вид: на фиг, 2 - каретка вертикального перемещения; на фиг. 3 - автономный привод вращения кассеты; на фиг. 4-схема захвата кареткой автономного привода вращения.
Установка для очистки изделий состоит из камеры с системой 2 отсоса, где размещены ванны 3 с упорами 4, исходная позиция 5 загрузки устройства, датчики 6 положения, автооператор 7, состоящий из кареток продольного 8 и вертикального 9 перемещений, которые соответственно перемещаются по направляющим 10 и 11, при этом привод 12 вертикального перемещения связан посредством кинематической передачи 13 с электромагнитными муфтами 14 и 15, которые находятся на валах 16 и 17, где соответственно размещены механизм 18 вертикального перемещения и гибкий вал 19, связанный с муфтой 20, а на кронштейне 21 размещены захватывающие оси 22 с канавкой 23, кроме этого, автономные приводы вращений кассет состоят из корпуса 26 с пазами 27 и упорами 28, с размещен- ными внутри корпуса валом 29 с подпружиненным диском 30 и аккумулятором 31 энергии, с кинематическим приводом 32, фиксатором 33, выходным валом 34, на котором закрепляются держатель 35 кассет с кассетой 36.
Установка работает следующим образом.
На исходную позицию 5 устанавливают автономный привод 24 вращения, на выходном валу 34 которого предварительно закрепляют держатель 35 кассет с кассетой 36, и включают с помощью пульта управления цикл обработки. Автооператор 7 перемещается к исходной позиции 5, захватывающие оси проходят внутрь пазоа 27, а по команде датчика 6 положения продольное перемещение автооператора 7 пре- кращается, привод 12 посредством электромагнитной муфты 14, вала 16 и механизма 18 вертикального перемещения сообщает каретке 9 движение вверх, в это время пазы 27 попадают в канавки 23 и таким образом автономный привод 24 вращения кассет фиксируется на осях 22 каретки 9, После окончания движения вверх муфта 14 выключается, и начинается продольное перемещение автооператора 7. В это время одновременно включаются муфты 15 и 20, которые передают вращательное движение привода 12 на аккумуляторы 31 энергии за
счет того, что при включении электромагнитная муфта 20 притягивает к себе диск 30, выполненный из магнитопроводящего материала, захватывает его, В аккумуляторе
энергии накапливается энергия или за счет накопления энергии в маховике, или в заводной пружине. После достижения автооператором 7 необходимой ванны 3 продольное перемещение прекращается,
0 муфты 15 и 20 отключаются, вкг очзется муфта 14 и привод 12 посредством механизма 18 вертикального перемещения сообщает каретке 9 вертикальное перемещение вниз, при этом упоры 28 автономного при5 вода 24 вращения устанавливаются на упоры 4 ванны 3, после чего каретка 9 еще несколько продвигается вниз и пазы 27 выходят из зацепления с канавкой 23. В это время срабатывает фиксатор 33 и для акку0 мулятора энергии-маховика 31 -соединяет вал 29 с кинематическим приводом 32, а для аккумулятора - заводной пружины - освобождает последнюю, давая возможность передавать вращение на выходной вал 34,
5 Таким образом, при нахождении кассеты 36 внутри ванны 3 сообщается вращательное движение, что положительно сказывается на качестве обработки подложек, размещенных в кассетах 36,
0 После окончания обработки в ванне 3 автооператор 7 перемещает автономный привод 24 вращения кассеты в следующую ванну. Весь цикл работы механизма в это время повторяется.
5 После установки автономного привода
24вращения кассеты на упоры 4 новой ванны автооператор 7 совершает горизонтальное перемещение, оси 22 выходят из плоскости пазов 27, после чего каретха 9
0 поднимается, а привод 24 остается в ванке. В это время на исходную позицию 5 устанавливают новый автономный привод 25.
Автооператор 7 захватывает автономный привод 25 и, повторяя цикл обработки,
5 перемещает его в первую ванну, где привод
25остается, а автооператор 7 перемещается, захватывает автономный привод 24, перемещает его в последующую ванну и т. д.
После окончания обработки автоном- 0 ный привод 24 подается на конечную позицию, где его снимают, потом туда поступает привод 25, его снимают, меняют кассету с обработанными подложками на новую и устанавливают на исходную позицию. Анало- 5 гмчно поступают с автономным приводом 24. Далее цикл обработки повторяется.
Благодаря такой конструкции установки можно обрабатывать сразу две и больше партий деталей, чем значительно повышается производительность труда.
Формула изобретения 1. Установка для очистки изделий, содержащая камеру с размещенными в ней технологическими ваннами, выстроенными в линию, систему отсоса, датчики позиционирования и автооператор с каретками вертикального и горизонтального перемещения, отличающаяся тем, что, с целью повышения производительности труда, она снабжена механизмами автономного вращения кассет, выполненными в виде корпуса с пазами и упорами и размещенных внутри него вала с подпружинен
ным диском, аккумулятора энергии в виде маховика и привода С фиксатором, электромагнитными муфтами и гибким валом, при этом привод каретки вертикального перемещения автооператора посредством электромагнитной муфты связан с механизмом вертикального перемещения, а посредством гибкого вала и двух электромагнитных муфт - с диском автономного механизма вращения кассет.
2. Установка по п. 1, отличающая- с я тем, что аккумулятор энергии выполнен в виде заводной пружины.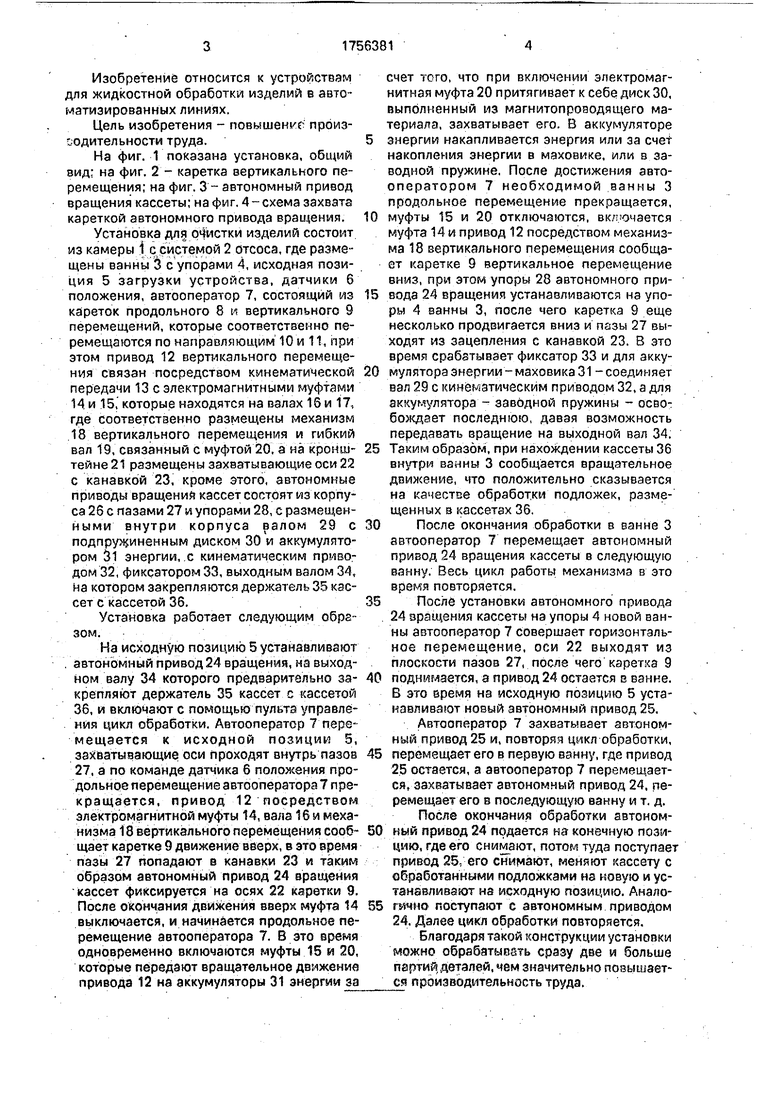
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для мойки деталей | 1989 |
|
SU1666235A2 |
| Установка для очистки изделий | 1989 |
|
SU1696588A1 |
| ИНЕРЦИОННЫЙ МЕХАНИЧЕСКИЙ ПРУЖИННЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРИЧЕСКИМ УПРАВЛЕНИЕМ И ГЕНЕРАТОРОМ, ВЫДАЮЩИМ ТОК ПОСТОЯННОЙ ЧАСТОТЫ ПРИ ВРАЩЕНИИ РОТОРА ГЕНЕРАТОРА ОТ ИНЕРЦИИ МАХОВИКА | 2000 |
|
RU2179656C1 |
| Автоматическая линия для металлизации плоских деталей | 1987 |
|
SU1507883A1 |
| Станок для деформирующего протягивания | 1985 |
|
SU1346410A1 |
| ИНЕРЦИОННЫЙ МЕХАНИЧЕСКИЙ ПРУЖИННЫЙ ДВИГАТЕЛЬ ДЛЯ ПОЛУЧЕНИЯ ЭНЕРГИИ | 1999 |
|
RU2153099C1 |
| Производственный модуль для нанесения гальванопокрыытий | 1987 |
|
SU1451186A1 |
| Установка для нанесения покрытий | 1983 |
|
SU1142386A2 |
| Автооператор | 1987 |
|
SU1426746A1 |
| Установка для нанесения покрытий | 1989 |
|
SU1678721A2 |
Применение. Жидкостная обработка изделий в микроэлектронике на автоматических линиях. Установка для очистки изделий включает камеру 1 с размещенными в ней валиками 2, систему отсоса, автооператор 7, несколько автономных приводов вращения кассеты 24, приводные механизмы которых состоят из аккумулятора энергии, выполненного в виде маховика, или заводной пру- жины, редуктора, на выходном валу которого крепится кассета с деталями. Привод каретки вертикального перемещения автооператора 7 состоит из электродвигателя и редуктора, который кинематически связан посредством электромагнитной муфты с механизмами вертикального перемещения, а посредством гибкого вала и двух электромагнитных муфт взаимодействует с диском автономного привода кассет. 1 з. п. ф-лы, 4 ил.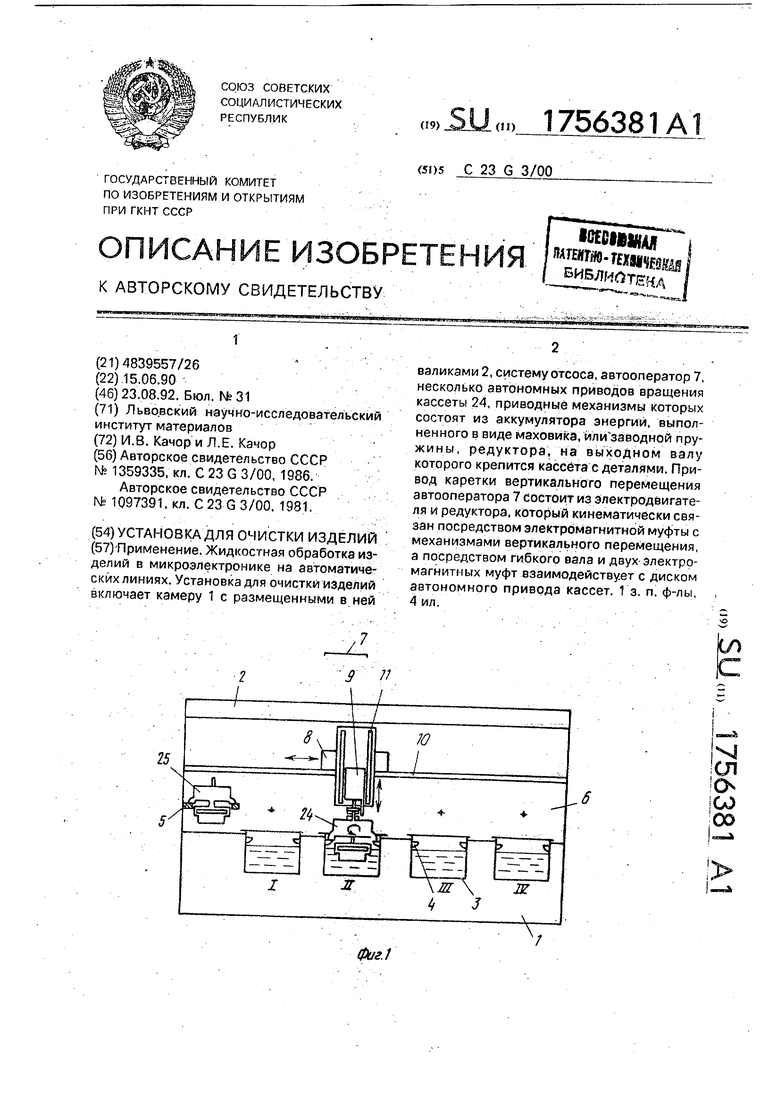
18 16 ft I II
Фиг.З
22 23
I
-2
2Q
tt
3D
U
| Установка для травления | 1986 |
|
SU1359335A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Устройство для очистки изделий | 1981 |
|
SU1097391A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
