Изобретение относится к приборостро1 ению и может быть использовано в маркшейдерском деле.
Известны гирокомпасы, содержащие чувствительный элемент, подвешенный на торсионном подвесе, верхнее крепление которого закреплено на амортизационной плате.
Недостаток данных устройств обусловлен тем, что при их транспортировке возможны деформации торсиона или даже его разрушение.
Известно устройство для определения направления истинного меридиана, содержащее подвешенный на торсионном подвесе чувствительный элемент. Верхнее крепление торсиона установлено в подвижной каретке, которая опирается на упругий нижний амортизатор, а над кареткой в корпусе чувствительного элемента установлен с осевым зазором второй амортизатор, выполненный в виде снабженной резьбой диафрагмы.
Недостатком данного устройства является то, что каретка опирается на упругий элемент. С течением времени в результате релаксации упругого элемента происходит просадка каретки вниз. Это влечет за собой увеличение осевого зазора с верхним амортизатором (составляющего долю миллиметра), опускание чувствительного элемента и связанную с этим разьюстировку арретира, токоподводов, датчиков сле дящей системы и т.п. Во время работы прибора при наличии единичных микровоздействий от работающего поблизости оборудования, работы оператора и т.п. чувствительный элемент будет колебаться в вертикальном направлении на упругом амортизаторе, Эти колебания значительно ухудшают точность системы сьема и преобразования информации и в конечном счете всего прибора. Кроме того, амплитуда осевых колебаний каретки и чувствительного элемента ограничена размерами других коне груктивных элементов гирокомпаса При этом если
С
уровень внешних воздействий превышает обусловленную величину, вследствие несогласованности этих ограничителей может произойти разрушение торсиона.
Целью изобретения является повыше- ние точности и надежности гирокомпаса.
Указанная цель достигается тем, что в гирокомпас, содержащем корпус, чувствительный элемент на торсионном подвесе, верхний зажим которого закр еплен в по- движной каретке, с осевой направляющей, причем каретка установлена в корпусе между верхним и нижним амортизаторами и верхним и нижним ограничителями хода каретки, а чувствительный элемент установ- лен между верхним и нижним огракичителя- ми его хода, верхний амортизатор установлен с предварительным натягом FI, причем
,
где Fa - сила прижатия каретки нижним амортизатором к верхнему амортизатору;
Т - суммарный вес каретки и чувствительного элемента,
при этом зазор верхнего ограничителя хода каретки выполнен меньшим зазора верхнего ограничителя хода чувствительного элемента, а зазор нижнего ограничителя хода каретки выполнен большим зазоре нижнего ограничителя хода чувствительного элемен- та.
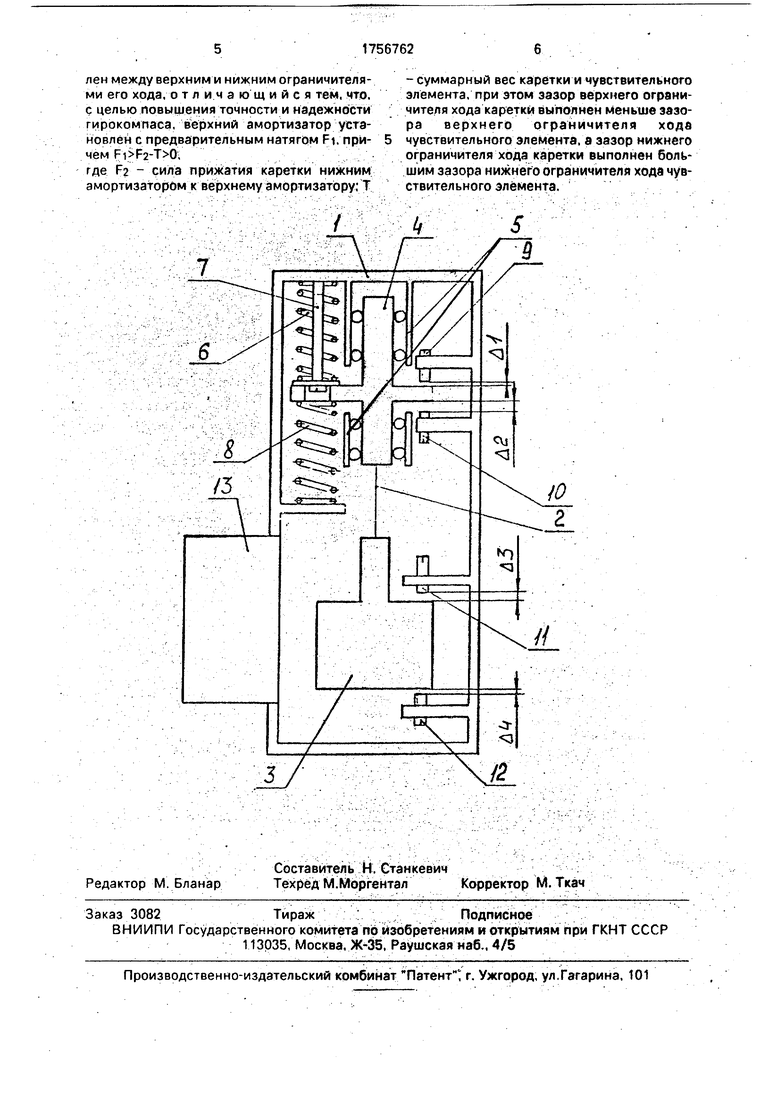
На чертеже показан предлагаемый гирокомпас.
В наружном корпусе 1 на торсионе 2 подвешен чувствительный элемент 3. Торси- он 2 закреплен в каретке 4, установленной в направляющей 5. Верхний амортизатор 6 поджат упором 7 до усилия FI , С ним контактирует каретка 4, поджатая нижним амортизатором 8. развивающим усилие Fa. Кроме того, на каретку 4 воздействует усилите Т собственного веса и натяжение торсиона 2 чувствительного элемента 3. Осевое перемещение каретки 4 ограничено верхним упором 9 с зазором Л1 и нижним упором 10 с зазором Л2. Осевое перемещение чувствительного элемента 3 также ограничено верхним 11 и нижним 12 упорами с зазорами A3 и А 4. При этом выполнены соотношения .
(1)
А К A3;(2)
.(3)
Преобразование информации о движении чувствительного элемента 2 в угол ази- мута осуществляется системой сьема и преобразования информации 13.
Гирокомпас работает следующим образом
В нормальных эксплуатационных условиях при отсутствии всяческих воздействий каретка 4 прижата нижним амортизатором 8 с усилием Fa-T к верхнему амортизатору 7 Так как верхний амортизатор 7 имеет предварительное натяжение FI, создаваемое упором 6, то до тех пор, пока , амортизатор 7 представляет собой аналог жесткого упора. До тех пор, пока , каретка 4 будет прижата к этому упору. Таким обра- зб мТ если внешние воздействия и релаксация упругих амортизаторов не превышают установленный порог, при котором выполняется соотношение (1), каретка 4, а с ней и торсион 2 и чувствительный элемент 3 находятся в строго определенном положении и юстировка всех систем гирокомпаса не нарушается. Отсутствие вертикальных колебаний чувствительного элемента повышает точность системы и преобразования информации 13.
В случае, когда в результате внешних воздействий величина Т достигает величин, нарушающих соотношение (1), верхний 7 и нижний 8 амортизаторы работают по своему прямому назначению - снижают перегрузки.
В случае, если перегрузки превышают расчетную величину, то при движении вверх, так как выполняется соотношение (2) между величинами зазоров в верхних упорах 9 и 11, сначала каретка 4 соприкоснется с упором 9, а затем чувствительный элемент 3 - с упором 11. При этом произойдет ослабление натяжения торсиона 2. При движении вниз, наоборот, сначала чувствительный элемент 3 соприкоснется с упором 12, а затем каретка 4 - с упором 11. При этом также произойдет ослабление натяжения торсиона 2
Таким образом, предлагаемый гирокомпас позволяет за счет создания псевдожесткого упора в нормальных эксплуатационных условиях повысить точность прибора путем снижения помех системе съема и преобразования информации за счет ликвидации вертикальных колебаний чувствительного элемента, а при воздействии ударных нагрузок не позволяет разрушить наиболее механически уязвимое место изделия - торсион, и тем самым повысить надежность прибора.
Формула изобретения
Гирокомпас, содержащий корпус чувствительный элемент на торсионном по,;чесе верхний зажим которого закреплен в подвижной каретке с осевой направляющей причем каретка установлена в корпусе между верхним и нижним амортизаторами и верхним и нижним ограничителями хода ка ретки, а чувствительный элемент установ
лен между верхним и нижним ограничителями его хода, отличающийся тем, что, с целью повышения точности и надежности гирокомпаса, верхний амортизатор установлен с предварительным натягом FI. причем .
где F2 - сила прижатия каретки нижним амортизатором к верхнему амортизатору; Т
- суммарный вес каретки и чувствительного элемента, при этом зазор верхнего ограничителя хода каретки выполнен меньше зазора верхнего ограничителя хода чувствительного элемента, а зазор нижнего ограничителя хода каретки выполнен большим зазора нижнего ограничителя хода чувствительного элемента.

| название | год | авторы | номер документа |
|---|---|---|---|
| Маркшейдерский гидрокомпас | 1977 |
|
SU676867A2 |
| Способ приведения чувствительного элемента торсионного гирокомпаса в плоскость меридиана | 1976 |
|
SU571700A1 |
| Наземный гирокомпас | 1976 |
|
SU550862A1 |
| МАРКШЕЙДЕРСКИЙ ГИРОКОМПАС | 1970 |
|
SU288320A1 |
| АВТОНОМНЫЙ ПОПЛАВКОВЫЙ ОДНОГИРОСКОПНЫЙ ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОКОМПАСА | 1996 |
|
RU2120607C1 |
| Способ регулировки угловой жесткости торсионного подвеса в наземном гирокомпасе | 1979 |
|
SU822618A1 |
| МАРКШЕЙДЕРСКИЙ МАЛОГАБАРИТНЫЙ ГИРОКОМИтшт^';'..^-'.:^,рБИБ;?;.о-г? | 1972 |
|
SU331253A1 |
| ИЗМЕРИТЕЛЬ НАПРАВЛЕНИЯ ГЕОГРАФИЧЕСКОГО МЕРИДИАНА | 1998 |
|
RU2150087C1 |
| Наземный гирокомпас | 1976 |
|
SU606414A1 |
| Трехстепенный маятниковый гирокомпас | 1991 |
|
SU1809306A1 |
Изобретение относится к области приборостроения и может быть использовано в маркшейдерском деле. Целью изобретения является повышение точности и надежности гирокомпаса. Обеспечение псевдожесткого крепления верхней заделки торсионного подвеса чувствительного элемента гирокомпаса между двумя амортиза- торами путем выполнения верхнего амортизатора с натягом позволяет устранить вертикальные колебания чувствительного элемента и тем самым, повысить точность прибора, а установка ограничителей хода каретки и хода чувствительного элемента и выполнения соответствующих соотношений зазоров в них позволяет исключить разрушение торсиона при ударных нагрузках 1 ил.
| Авторское свидетельство СССР N 837160 | |||
| кл, G 01 С 19/38, 1979. |
