чивает время измерений при принятой в маркшейдерской практике методике определения положения равновесия прецессионных колебаний чувствительного элемента по точкам реверсии.
Целью дополнительного изобретения является повышение быстродействия и точности приведения гирокомпаса в меридиан с сохранением тех преимуществ, которые дает шарнирное крепление верхнего зажима торсионного подвеса.
Это достигается тем, что в маркшейдерском гирокомпасе ось шарнира совмещена с поперечной плоскостью сечения торсионных лент в месте их выхода из верхнего зажима торсиона.
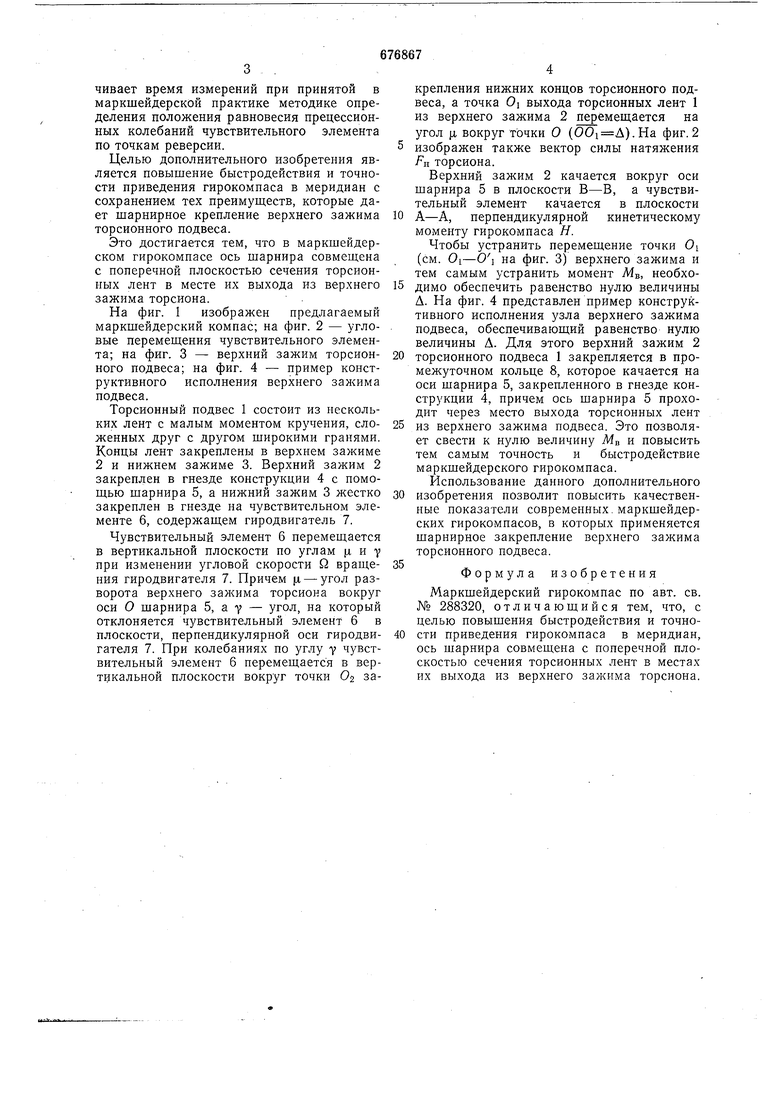
На фиг. 1 изображен предлагаемый маркшейдерский компас; на фиг. 2 - угловые перемещения чувствительного элемента; на фиг. 3 - верхний зажим торсионного подвеса; на фиг. 4 - пример конструктивного исполнения верхнего зажима подвеса.
Торсионный подвес 1 состоит из нескольких лент с малым моментом кручения, сложенных друг с другом широкими гранями. Концы лент закреплены в верхнем зажиме 2 и нижнем зажиме 3. Верхний зажим 2 закреплен в гнезде конструкции 4 с помощью шарнира 5, а нижний зажим 3 жестко закреплен в гнезде на чувствительном элементе 6, содержащем гиродвигатель 7.
Чувствительный элемент 6 перемещается в вертикальной плоскости по углам ji и у при изменении угловой скорости Q вращения гиродвигателя 7. Причем |л - угол разворота верхнего зажима торсиона вокруг оси О шарнира 5, а у - угол, на который отклоняется чувствительный элемент 6 в плоскости, перпендикулярной оси гиродвигателя 7. При колебаниях по углу 7 чувствительный элемент 6 перемещается в верт1 кальной плоскости вокруг точки Oz закрепления нижних концов торсионного подвеса, а точка Oj выхода торсионных лент 1 из верхнего зажима 2 перемещается на угол 1 вокруг точки О ().Ha фиг.2
изображен также вектор силы натяжения FII торсиона.
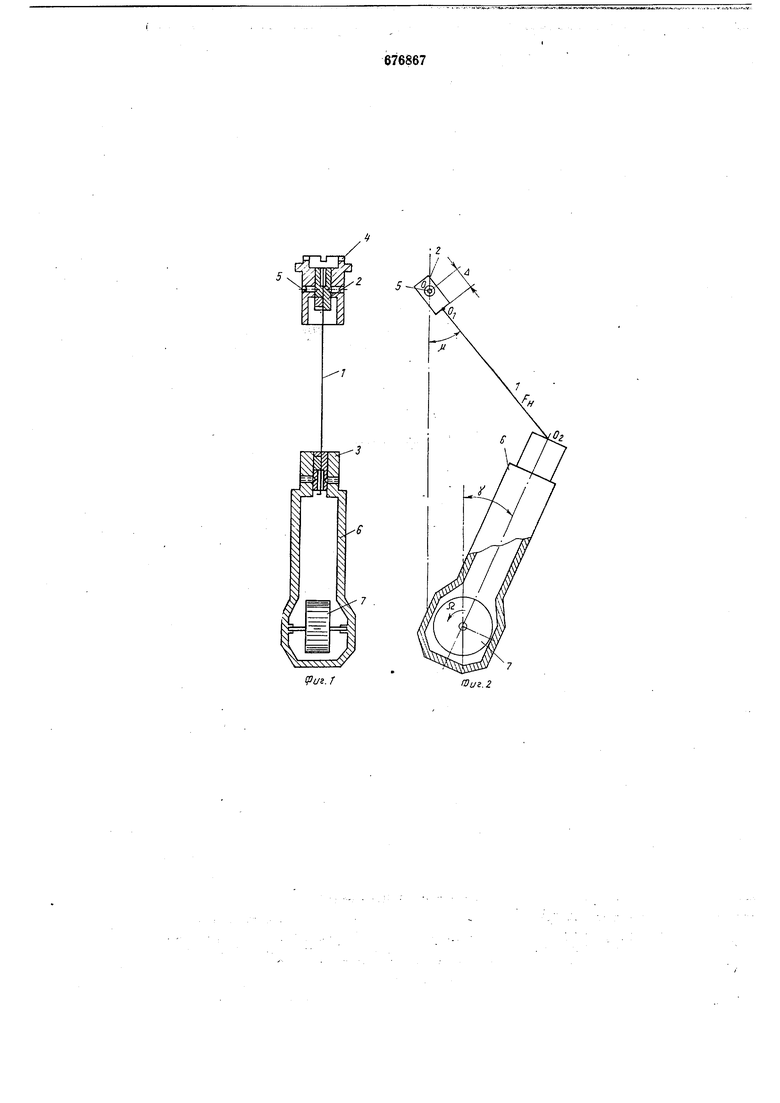
Верхний зажим 2 качается вокруг оси шарнира 5 в плоскости В-В, а чувствительный элемент качается в плоскости
А-А, перпендикулярной кинетическому моменту гирокомпаса Я.
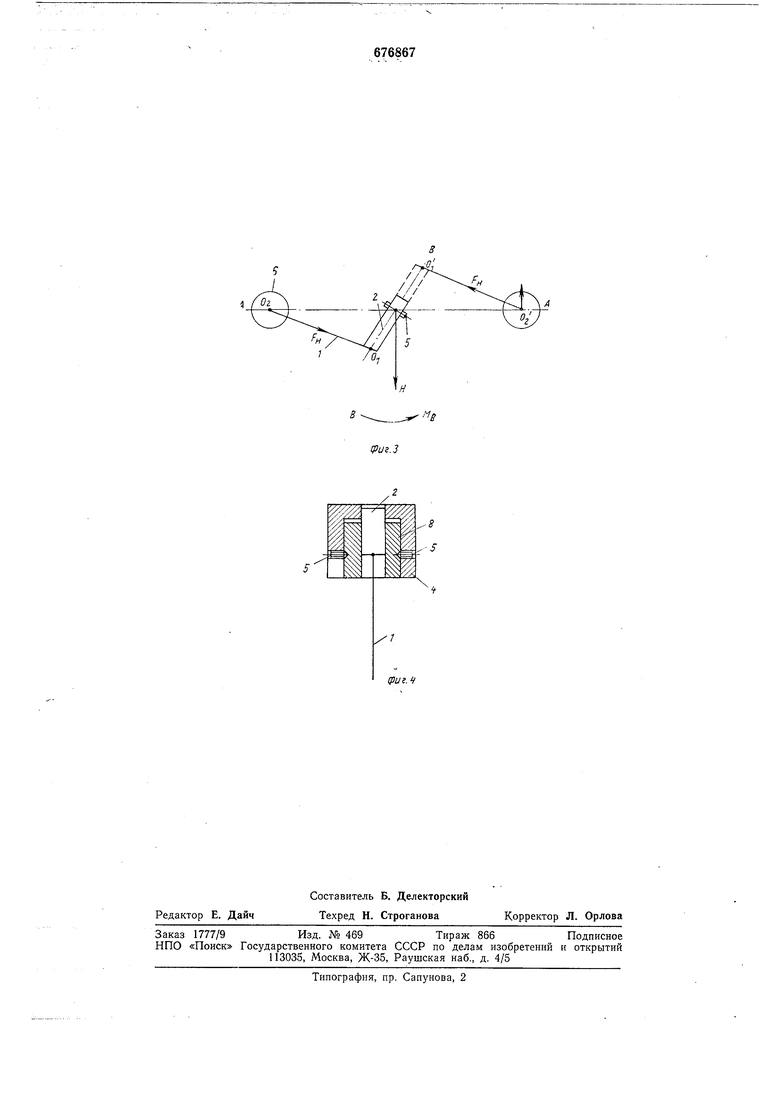
Чтобы устранить перемещение точки Oi (см. Oi-Ol на фиг. 3) верхнего зажима и тем самым устранить момент MB, необходимо обеспечить равенство нулю величины Д. На фиг. 4 представлен пример конструктивного исполнения узла верхнего зажима подвеса, обеспечивающий равенство нулю величины Д. Для этого верхний зажим 2
торсионного подвеса 1 закрепляется в промежуточном кольце 8, которое качается на оси шарнира 5, закрепленного в гнезде конструкции 4, причем ось шарнира 5 проходит через место выхода торсионных лент
из верхнего зажима подвеса. Это позволяет свести к нулю величину Afn и повысить тем самым точность и быстродействие маркшейдерского гирокомпаса. Использование данного дополнительного
изобретения позволит повысить качественные показатели современных, маркшейдерских гирокомпасов, в которых применяется шарнирное закрепление верхнего зажима торсионного подвеса.
..
Формула изобретения
Маркшейдерский гирокомпас по авт. св. № 288320, отличающийся тем, что, с целью повышения быстродействия и точности приведения гирокомпаса в меридиан, ось шарнира совмещена с поперечной плоскостью сечения торсионных лент в местах их выхода из верхнего зажима торсиона.
(риг. г
ПЗцг.г
| название | год | авторы | номер документа |
|---|---|---|---|
| Наземный гирокомпас | 1976 |
|
SU550862A1 |
| МАРКШЕЙДЕРСКИЙ ГИРОКОМПАС | 1970 |
|
SU288320A1 |
| Наземный гирокомпас | 1976 |
|
SU606414A1 |
| ИЗМЕРИТЕЛЬ НАПРАВЛЕНИЯ ГЕОГРАФИЧЕСКОГО МЕРИДИАНА | 1998 |
|
RU2150087C1 |
| Угломерное устройство для наземного гирокомпаса | 1976 |
|
SU579544A2 |
| Способ приведения чувствительного элемента торсионного гирокомпаса в плоскость меридиана | 1976 |
|
SU571700A1 |
| МАРКШЕЙДЕРСКИЙ МАЛОГАБАРИТНЫЙ ГИРОКОМИтшт^';'..^-'.:^,рБИБ;?;.о-г? | 1972 |
|
SU331253A1 |
| Торсионный подвес чувствительного элемента наземного гирокомпаса | 1980 |
|
SU862668A1 |
| Учебный прибор для демонстрации свойств гироскопа | 1983 |
|
SU1208573A1 |
| Угломерное устройство для наземного гирокомпаса | 1975 |
|
SU522413A1 |
фиг.Ч
