-
|
|l
§
VJ
СП
о
00
о ю
Изобретение относится к автоматическим устройствам для управления окрасочным роботом или манипулятором и может быть использовано для отслеживания изделий, перемещаемых конвейером в окрасом- ном производстве и других областях техники.
Известно устройство для управления роботом-окрасчиком, содержащее блок датчиков, блок памяти и генератор импульсов.
Недостатком данного устройства является низкая точность отслеживания, обусловленная жесткой зависимостью исполнения устройства от конкретного расстояния между блоком датчиков и роботом- окрасчиком, что также ограничивает технологические возможности устройства.
Известна установка для нанесения покрытий, содержащая блок синхронизации, блоки буферной и рабочей памяти, блок дат-
ЧИК08.
Недостатком данного устройства является низкая точность отслеживания положения перемещаемых конвейером изделий вследствие того, что блок синхронизации CBfjaH с подвесками конвейера, расстояние между которыми может быть различным.
Кроме того, ограничены технологические возможности устройства, так как в каждом конкретном случае его применения необходимо изменять конструкцию блоков буферной и рабочей памяти в зависимости от расстояния между блоком датчиков и исполнительным органом окрасочного робота или манипулятора.
Цель изобретения - повышение точности и расширение технологических возможностей.
Поставленная цель достигается тем, что устройство для отслеживания положения изделий, перемещаемых конвейером, содержащее блок синхронизации, блок фотодатчиков, блок памяти отслеживаемого расстояния, блок буферной памяти, вход управления считыванием которого подключен к первому выходу блока синхронизации, второй выход которого подключен к входу управления записи блока памяти отслеживаемого расстояния, блок фотодэтчиков, оптически связан с отслеживаемым изделием, дополнительно введены датчик синхронизации, элемент связи с тяговым органом, установленный на тяговом органе конвейера и связанный с датчиком синхронизации, задатчик расстояния отслеживания, счетчик шагов, блок формирования разности, выход которого подключен с адресному входу блока памяти отслеживаемого расстояния, первый информационный вход - к выходу задатчика расстояния отслеживания, тактовый вход - к третьему выходу блока синхронизации, второй информационный вход - к выходу счетчика шагов, вход которого подключен к четвертому выходу блока синхронизации, вход запуска которого подключен к выходу датчика синхронизации, информационный вход блока памяти отслеживаемого расстояния подключен к выходу блока фотодатчиков, а выход- к информационному входу блока буферной памяти, выход которого является выходом устройства.
В устройство дополнительно введены датчик синхронизации, элемент связи с тяговым органом, установленный на тяговом органе конвейера и связанный с датчиком синхронизации, задатчик расстояния отслеживания, счетчик шагов, блок формирования разности, выход которого подключен к адресному входу блока памяти отслеживаемого расстояния, первый информационный вход - к выходу задатчика расстояния отслеживания, тактовый вход - к третьему выходу блока синхронизации, второй информационный вход - к выходу счетчика шагов, вход которого подключен к четвертому выходу блока синхронизации, вход запуска которого подключен к выходу датчика синхронизации, информационный вход блока памяти отслеживаемого расстояния подключен к выходу блока фотодатчиков, а выход - к информационному входу блока буферной памяти, выход которого является выходом устройства.
На чертеже дана блок-схема устройства для отслеживания положения изделий , перемещаемых конвейером.Устройство для отсле- жисания положения изделий 1, перемещаемых конвейером/содержит элемент 2 связи с тяговым органом 3, установленый на тяговом органе 3 конвейера и связаный с датчиком 4 синхронизации, блок 5 синхронизации, счетчик б шагов, блок 7 фотодатчиков, блок
8памяти отслеживаемого расстояния, блок
9буферной памяти, блок 10 формирования разности и задатчик 11 расстояния отслеживания.
Устройство работает следующим образом.
Расстояние, на котором необходимо отследить изделие 1, перемещаемое конвейером, задается в задатчике 11 расстояния отслеживания. Это расстояние разбивается на определенное количество шагов отслеживания с помощью элемента 2 связи с тяговым органом 3, установленного на тяговом органе 3 конвейера и воздействующего на датчик 4 синхронизации при перемещении конвейера на каждый шаг отслеживания.
При перемещении конвейера на один шаг отслеживания датчик 4 синхронизации срабатывает и запускает блок 5 синхронизации, выделяющий серию тактовых импульсов, по которым происходит: запись информации с блока 7 фотодатчиков в блок 8 памяти отслеживаемого расстояния по адресу записи; считывание отслеженной информации из блока 8 памяти отслеживаемого расстояния и запись ее в блок 9 буферной памяти, при этом величина разницы адресов в режимах записи и считывания, формируемых блоков 10 формирования разности, постоянна и соответствует расстоянию, заданному на задатчике 11 расстояния отслеживания; а также происходит увеличение состояния счетчика шагов 6 на единицу.
Затем устройство переходит в режим ожидания до прихода следующего импульса с датчика 4 синхронизации.
Цикл повторяется.
После прохождения серии тактовых импульсов с датчика 4 синхронизации, количество которых эквивалентно расстоянию отслеживания, информация об изделии, выведенная на блок 9 буферной памяти, является командой на включение исполнительного органа окрасочного робота или манипулятора.
Данное техническое решение повышает точность отслеживания положения изделий, перемещаемых конвейером, благодаря возможности многократной записи и считывания отслеживаемой информации, что обеспечивается компоновкой блок-схемы устройства, а также привязкой датчика 4 синхронизации с элементом 2 связи к тяговому органу конвейера 3
Кроме того, расширяются технологиче- ские возможности устройства благодаря наличию в его блок-схеме задатчика 11
расстояния отслеживания, что позволяет задавать расстояние отслеживания в зависимости от изменения расстояния между блоком 7 фотодатчиков и исполнительным органом робота или манипулятора.
Формула изобретения Устройство для отслеживания положения изделий, перемещаемых конвейером, содержащее блок синхронизации, блок фотодатчиков, блок памяти отслеживаемого расстояния, блок буферной памяти, вход управления считыванием которого подключен к первому выходу блока синхронизации, второй выход которого подключен к входу управления записи блока памяти отслеживаемого расстояния, блок фотодатчиков оптически связан с отслеживаемым изделием, отличающее с я тем, что, с целью повышения точности и расширение технологических возможностей, дополнительно введены датчик синхронизации, элемент связи с тяговым органом, установленный на тяговом органе конвейера и связанный с датчиком синхронизации, задатчик расстояния отслеживания, счетчик шагов, блок формирования разности, выход которого подключен к адресному входу блока памяти отслеживаемого расстояния, первый информационный вход- к выходу задатчика расстояния отслеживания, тактовый вход - к третьему выходу блока синхронизации, второй информационный вход - в выходу счетчика шагов, вход которого подключен к четвертому выходу блока синхронизации, вход запуска которого подключен к выходу датчика синхронизации, информационный вход блока памяти отслеживаемого расстояния подключен к выходу блока фотодатчиков, а выход - к информационному входу блока буферной памяти, выход которого является выходом устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая установка для нанесения покрытий | 1981 |
|
SU1055544A1 |
| Устройство для контроля состояния критической ситуации | 1990 |
|
SU1737412A1 |
| Устройство управления сортировкой изделий | 1986 |
|
SU1388111A1 |
| Устройство для управления роботом- окрасчиком | 1978 |
|
SU744454A1 |
| Устройство для управления роботом-окрасчиком | 1975 |
|
SU491929A1 |
| Устройство для распознавания изображений | 1990 |
|
SU1795483A1 |
| Устройство для управления роботом-окрасчиком | 1984 |
|
SU1254436A2 |
| Устройство для программного управления промышленными роботами | 1982 |
|
SU1072000A1 |
| Устройство для управления робототехнологическим комплексом | 1989 |
|
SU1780080A1 |
| Устройство для считывания графической информации | 1982 |
|
SU1084835A1 |
Изобретение относится к автоматическим устройствам для управления окрасочным роботом и манипулятором. Цель изобретения - повышение точности и расширение технологических возможностей, Устройство содержит элемент 2 связи с тяговым органом 3, установленный на ТЯГОЁОМ органе 3 конвейера и связанный с датчиком 4 синхронизации, блок 5 синхронизации, счетчик 6 шагов, блок 7 фотодатчиков, блок 8памяти отслеживаемого расстояния, блок 9буферной памяти, блок 10 формирования разности и задатчик 11 расстояния отслеживания с соответствующими функциональными связями. Точность отслеживания положения изделий повышена за счет возможности многократной записи и считывания отслеживаемой информации. Технологические возможности устройства расширяются за счет автоматической переналадки блок-схемы при изменении расстояния отслеживания. 1 ил. Ю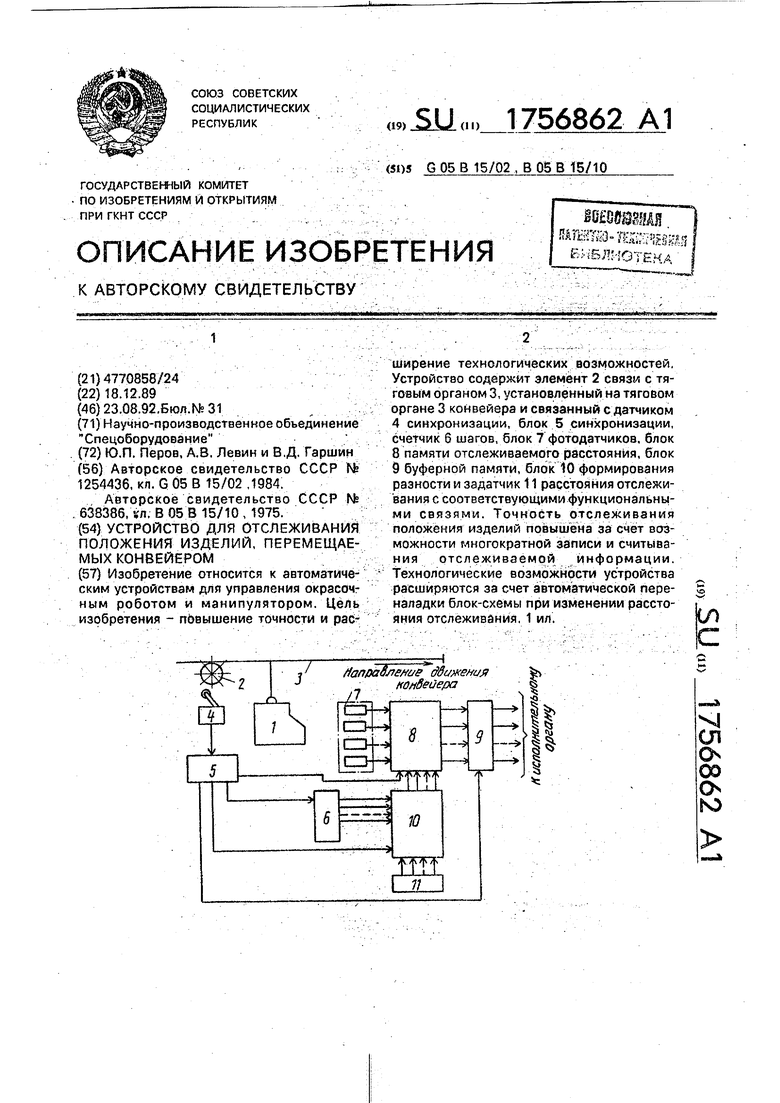
| Устройство для управления роботом-окрасчиком | 1984 |
|
SU1254436A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Установка для нанесения покрытий | 1975 |
|
SU638386A1 |
