1
Изобретение относится к области вычислительной техники и автоматики и может найти применение для управления роботами-окрасчиками плоских изделий произвольной конфигурации в различных отраслях промышленности, в частности в кожевенной, автомобильной, манипюстроительной и др.
Известны устройства для управления роботом-окрасчиком, содержащие фотосчитывающпй блок, блок управления подачей краски, блок упраплепия движением краскораспылителя.
Недостатком известных устройств являются пизкая точность запоминания контура окраИ1иваемого изделия, приводящая к плохой прокрап1иваемости изделия и большому расходу красителя, т. к. для уменьшения брака окраска производится с некоторым запасом. Таким образом, целью изобретения является повышение точности и экопомичиостп устройства.
Цель изобретения достигается тем, что устройство содержит блок регистров сдвига, входы которого подключены к соответствующим датчикам фотосчитывающего блока, элемент «ИЛИ, коммутатор опроса, сигнальные входы которого соединены с соответствующими выходами блока регистров сдвига и с соответствующими входами элемента «ИЛИ, а выход подключен к входу блока управления
подачей краски, триггер, датчик скорости транспортера, элемент «И, первый вход которого подключен к выходу элемента «ИЛИ, второй вход-к датчику скорости транспортера и к управляющему входу блока регистров сдвига, а выход - к счетному входу триггера, выходы которого соединены с соответствующими управляющими входами коммутатора опроса и с блоком управления днижеиием краскораспылителя.
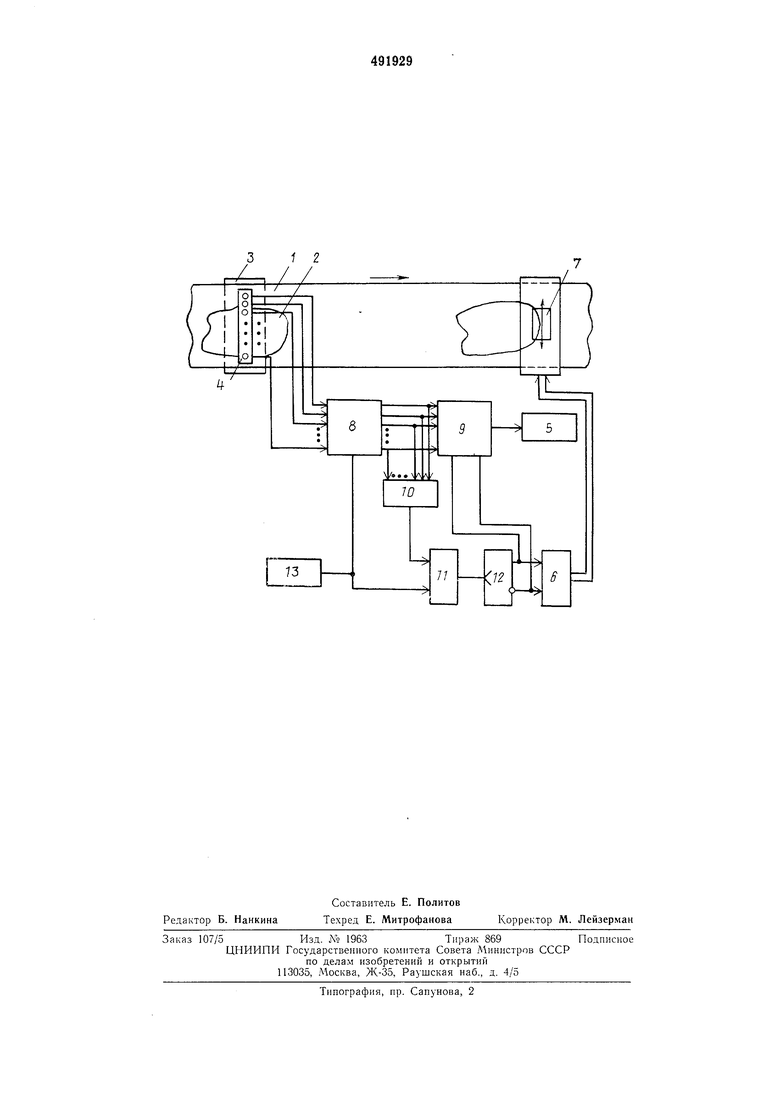
На чертеже изображено устройство управления роботом-окрасчиком, где: 1 - транспортер; 2 - изделие; 3 - лампа подсвета; 4 - фотосчитывающий блок; 5 - блок управленпя подачей краски; 6 - блок управления движением краскораспылителя; 7 - краскораспылитель; 8 - блок регистров сдвига; 9 - коммутатор опроса; 10 - элемент II-элемент 12 - триггер; 13 - датчик
скорости транспортера.
Фотосчптывающий блок 4 выполнен в виде лииейки фотодатчиков, расположенных пеподвижно над транспортером 1 вне зоны покраски. Каждый из фотодатчиков соединен с
соответствующим входом записи блока регистров сдвига 8, выходы которого подключены к соответствующим сигнальным входам коммутатора опроса 9 и к соответствующим входам элемента «ИЛИ 10. Выход датчика
13 скорости транспортера соединен с управляющим входом блока регистров сдвига 8 и с первым входом элемента «И 11, второй вход которого соединен с выходом элемента «ИЛИ 10, а выход - со счетным входом триггера 12. Каждый из выходов триггера подключен к блоку 6 управления движением краскораснылителя и к соответствующим управляющим входам коммутатора опроса 9, выход которого соединен с блоком 5 управления подачей краски.
Устройство работает следующим образом.
В процессе движения на транспортере 1 изделие 2 попадает в зону чувствительности фотодатчиков фотосчитывающего блока 4. Сигналы от сработавших фотодатчиков поступают на соответствующие входы записи блока регистров сдвига 8. Число регистров в данном блоке равно числу фотодатчиков. Датчик 13 скорости транспортера вырабатывает тактовые импульсы, частота следования которых пропорциональна скорости движения транспортера 1. С приходом каждого тактового импульса на управляющий вход блока регистров сдвига 8 в данном блоке осуществляется сдвиг содержимого всех регистров па один разряд вправо, а затем запись в .младшие разряды регистров очередного кода фотодатчиков. Число разрядов в пегистрах пронорционально расстоянию от зоны фотодатчиков до зоны окраски. Таким образом, когда изделие подойдет к зоне окраски, информация о его конфигурации окажется в старших разрядах регистров.
В отличие от устройства-аналога краскораспылитель 7 заявляемого устройства в отсутствие изделия в зоне окраски стоит в одном из крайних положений, а не двигается непрерывно поперек транспортера, т. к. до тех пор пока изделие не подойдет к зоне окраски, на выходе элемент «ИЛИ 10 будет «О и тактовые импульсы датчика 13 скорости транспортера ие будут поступать на счетный вход триггера 12 и, следовательно, на блок 6 управления движением краскораспылителя. С появлением информацин об изделии в виде логических «1 в старших разрядах блока регистров сдвига 8 и, следовательно, на входах элемента «ИЛИ 10 элемент «И откры1;ается, и тактовые импульсы датчика 13 скорости транспортера поступают на счетный вход триггера 12. Каждый тактовый импульс изменяет состояние триггера 12, тем самым изменяя направление движения краскораспылителя 7 и направление опроса регистров сдвига коммутатором опроса 9. Направление опроса блока регистров сдвига 8 и направление движения краскораснылителя 7 согласованы, а скорость их выбрана так, чтобы закончить проход в одну сторону до появления следующего тактового импульса. Коммутатор опроса 9 анализирует содержимое старших разрядов блока регистров сдвига 8 и вырабатывает управляющий сигнал лишь нри наличии в них «единиц. Сигнал с выхода коммутатора опроса 9 поступает на блок 5 унравления нодачей краски, который включает или отключает подачу краски. Таким образом производится окраска изделия только в пределах его контура.
Формула изобретения
Устройство для управления роботом-окрасчиком, содержащее фотосчитывающий блок, блок управления нодачей краски, блок унравления движением краскораснылителя, отличающееся тем, что, с целью повышения точности и экономичности устройства, оно содержит блок регистров сдвига, входы которого подключены к соответствующим датчикам фотосчитывающего блока, элемент «ИЛИ, коммутатор опроса, сигнальные входы которого соединены с соответствующими выходами блока регистров сдвига и с соответствующими входами элемента «ИЛИ, а выход подключен к входу блока управления нодачей краски, триггер, датчик скорости транспортера, элемент «И, первый вход которого подключен к выходу элемента «ИЛИ, второй вход - к датчику скорости транспортера и к управляющему входу блока регистров сдвига, а выход - к счетному входу триггера, выходы которого соединены с соответствующнми управляющими входами коммутатора опроса и с блоком управления движеннем краскораспылителя.
1 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления роботом-окрасчиком | 1984 |
|
SU1254436A2 |
| Устройство для управления роботом- окрасчиком | 1978 |
|
SU744454A1 |
| Устройство для программного управления промышленными роботами | 1982 |
|
SU1072000A1 |
| Устройство определения центров круглых предметов для систем управления роботом-манипулятором технологического конвейера | 1973 |
|
SU455322A1 |
| Устройство для распознавания изображений | 1990 |
|
SU1795483A1 |
| Устройство для распознавания изделий | 1986 |
|
SU1344432A1 |
| Устройство для управления положением объекта | 1985 |
|
SU1327068A1 |
| Устройство для измерения объема бревен | 1985 |
|
SU1380808A1 |
| Устройство для ориентации изделий | 1988 |
|
SU1585020A1 |
| Устройство для управления роботомманипулятором технологического конвейера | 1973 |
|
SU477394A1 |