Изобретение относится к области машиностроения и может быть использовано в манипуляторах.
Известен захват манипулятора, содержащий корпус, приводи губки;выполненные в виде поворотных элементов с набором рабочих профилей, при этом губки установлены на ползунах кинематически связанных с приводом их сведения-разведения, а каждая губка содержит подпружиненный диск, на котором выполнены упоры, количество которых равно количеству рабочих поверхностей губок, причем упоры имеют возможность взаимодействия с толкателями, смонтированными на штоке дополнительного привода /1/.
Недостатком этого захвата является то, что при смене губок необходимо соприкосновение пальцев, на которых установлены губки с горизонтальной поверхностью.
Целью изобретения является расширение технопогических возможностей схвата.
Поставленная цель достигается тем, что захват манипулятора, Щцёр жащ йй корпус, привод и губки, выполненные в виде поворотных элементов с набором рабочих профилей, при этом губки установлены на ползунах кинематичёскиТ;вязэнных с приводом их сведения-разведения, а каждая губка содержит подпружиненный диск, на котором выполнены пбрыТ Шличествг которых разно количеству рабочих поверхностей губок, причем упоры имеют возможность взаимодействия толкателями смонтированными на штоке дополнительного привода, снабжен смонтированными на ползунах копирами, а каждый толкатель выполнен в виде Г-образного элемента, Имеющего возможность взаимодействия с упорами, выношенными подпружиненными
при этом одна из сторон Г-образного элемента смонтирована параллельно диску на одном уровне с нижней точкой пр с ильной поверхности копира.
Сопоставительный анализ с проготи- пом позволяет сделать вывод, что заявляемый захват манипулятора отличается тем, что он снабжен смонтированными на ползунах копирами, а каждый толкатель выполнен в виде Г-образного элемента, имеющего возможность взаимодействия с упорами, выполненными подпружиненными при этом одна из сторон Г-образного элемента смонтирована параллельно диску на одном уровне с нижней точкой профиль- ной поверхности копира, Таким образом заявляемое техническое решение соответствует критерию новизна.
Сравнение заявляемого решения не только с прототипом, но и с другими техни- ческими решениями в данной области техники не позволило выявить в них признаки, отличающие заявляемое решение от прототипа, что позволяет сделать вывод о соответствии критерию существенные отличия,
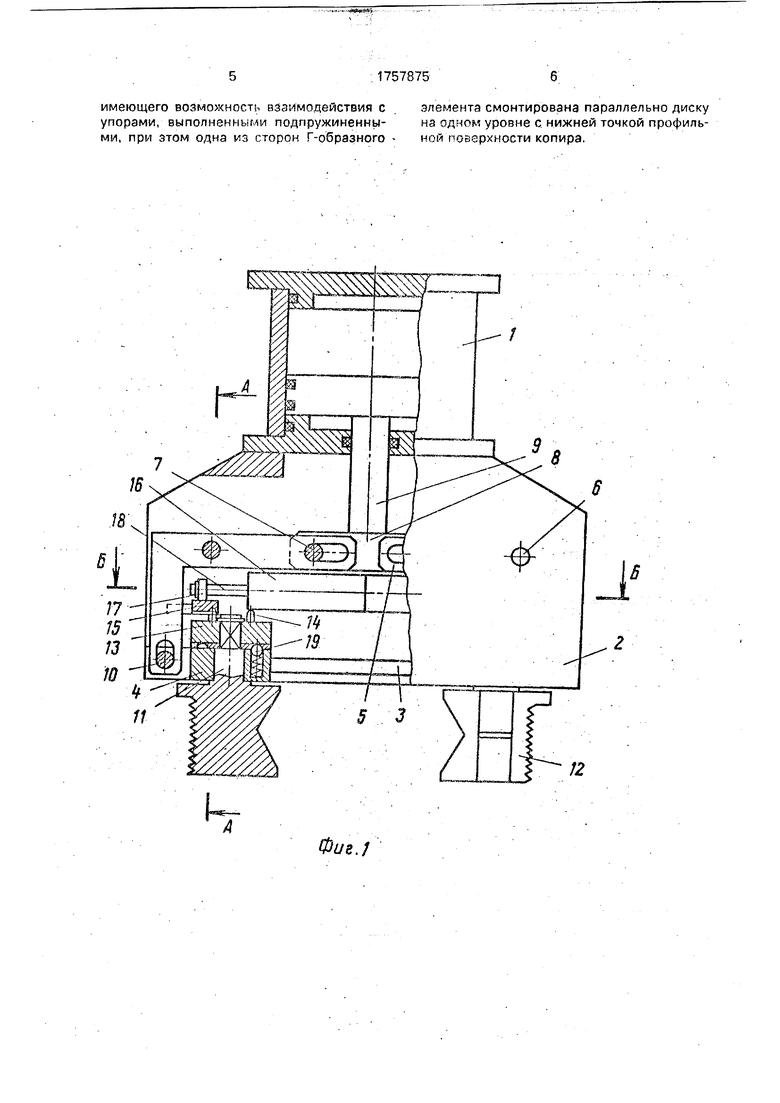
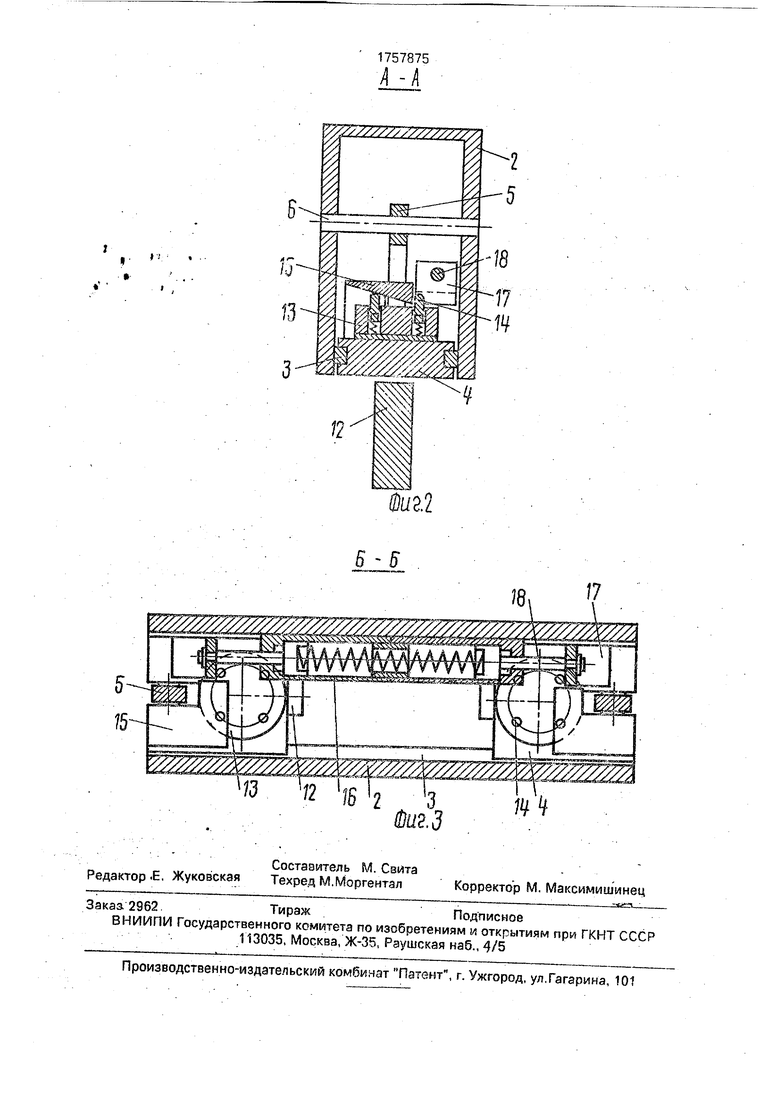
Сущность изобретения поясняется чертежом, где на фиг.1 показан общий вид за хвата; на фиг,2 - разрез А - А на фиг.1; на фиг.З - разрез Б - Б на фиг.1,
Захват манипулятора содержит привод 1, установленный на корпусе 2, Внутри кор пуса 2 установлены направляющие 3 с возможностью перемещения по ним ползунов 4. Ползуны 4 связаны с приводом 1 посред- ством тяги 5, которая может поворачиваться вокруг оси 6, установленной в корпусе 2, Один конец тяги 5 связан через ось 7 с коромыслом 8, жестко установленным на штоке 9 привода 1, а другой - конец - через ось 10 с ползуном 4, В ползуне 4 установлен палец 11, на конце которого смонтированы губки 12 различной.конфигурации (губки 12 могут быть выполнены за одно целое с пальцем 11), на другом конце пальца 11 устаноз- лен диск 13. На диске 13 установлены подпружиненные упоры 14с возможностью взаимодействия с копиром 15 установленным на ползуне 4, На одной из стенок уста- новлен дополнительный привод 16, толкатель 17 которого смонтирован на штоке 18 с возможностью взаимодействия с упорами 14, На ползуне установлен фиксатор 19.
Захват манипулятора работает следую- щим образом. В бесштоковую полость привода 1 подается сжатый воздух, под действием которого поршень занимает нижнее положение, а вместе с ним шток 9 и коромысло 8 с осью 7, которая поворачивает
тягу 5. Тяга 5, поворачиваясь, действует на ось 10, перемещает ползун 4 с губками 12. После разведения губок 12 захват устанавливают над деталью, для ее захвата избыточное давление подается в штоковую полость привода 1. В результате поршень перемещается в верхнее положение. Усилие, действующее на поршень, передается через шток 9, коромысло 8, ось 7, тягу 5, ось 40, ползун 4 к пальцам 11 с губками 12, которые зажимают деталь. После переноса детали губки 12 разводятся, освобождая деталь Затем цикл повторяется,
Для захвата детали другой формы необходима смена губок 12 на другую конфигурацию. Для этого в захвате с разведенными губками 12 включают дополнительный привод 16, т.е. подают избыточное давление воздуха в штоковые полости привода 16. При этом толкатели 17, действуют на упоры 14, повернут диски 13с пальцами 11 и губками 12. Одновременно с поворотом диска 13 упор 14, следующий за упором 14 на который действует толкатель 17, взаимодействуя с копиром 15, начнет утапливаться, т.е. сместится с в нижнее положение и в конце движения поршня допол- нительного привода 16 окажется под нижней плоскостью толкателя 17. Затем подача избыточного давления в дополнительный привод 16 прекращается и поршни которого под действием пружин перемещаются в исходное положение, а вместе с ними штоки 18с толкателями 17. Упоры 14, находящиеся под толкателями 17, в конце хода выйду г из-под толкателей 17 и станут перед ними. Далее цикл повторяется.
Применение данных захватов расширит технологические возможности, т.к. позволит захватывать детали различной формы без соприкосновения захвата с горизонтальной поверхностью при смене губок,
Формула изобретения
Захват манипулятора, содержащий корпус, привод и губки, выполненные в виде поворотных элементов с набором рабочих профилей, при этом губки установлены на ползунах, кинематически связанных с приводом их сведения-разведения, а каждая губка содержит подпружиненный диск, на котором выполнены упоры, количество которых равно количеству рабочих поверхностей губок, причем упоры имеют возможность взаимодействия с толкателями, смонтированными на штоке дополнительного привода, отличающийся тем, чтто, с целью расширения технологических возможностей,- он снабжен смонтированными на ползунах копирами, а каждый толкатель чыполнен в виде Г-обрэзногоэтемзчта,
имеющего возможность взаимодействия с элемента смонтирована параллельно диску упорами, выполненными подпружмненны- на одном уровне с нижней точкой профиль- ми, при этом одна из сторон г-образного - ной поверхности копира
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1989 |
|
SU1685704A1 |
| Устройство автоматической смены инструмента | 1987 |
|
SU1425032A1 |
| Захват промышленного робота | 1987 |
|
SU1509247A1 |
| ЗАХВАТ ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ АМПУЛ С ПУЧКАМИ ОТРАБОТАВШИХ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 2018 |
|
RU2684394C1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Автооператор | 1979 |
|
SU772809A1 |
| Захват манипулятора | 1980 |
|
SU876421A1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО ЛУЖЕНИЯ ЗАГОТОВОК СТЕКЛОКЕРАМИЧЕСКИХ КОНДЕНСАТОРОВ РАДИОДЕТАЛЕЙ | 1989 |
|
SU1820573A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБТЯЖКИ И ЗАТЯЖКИ НОСОЧНО-ГЕЛЕНОЧНОЙ ЧАСТИ ОБУВИ | 2007 |
|
RU2365320C2 |
| Кантователь труб | 1990 |
|
SU1726082A1 |
Использование: в машиностроении, в захватах с последующей сменой губок, Сущность изобретения: на ползуне 4 установлен копир 15 из колец 11, на одном конце которого смонтированы губки 12 различной конфигурации, на другом диск 13 На диске 13 установлены подпружиненные упоры 14 Толкатель 17 дополнительного привода 16 выполнен в виде Г-образного элемента, одна из сторон которого napaJifleTibtfa диску 13 и установлена на одном уровне с нижней точкой профильной поверхности копира 15. При смене губок 12 толкатели 17 действуют на упоры 14, поворачивают диски 13, при этом упор 14, следующий за упором, на который действует толкатель 17,утапливается копиром 15 и в конце движения поршня окажется под нижней плоскостью толкателя 17. Затем поршни 18 перемещаются а исходное положение, а упбры 14 выходят из- под толкателей.
Нг
Фиг./
12
j
3
W Ґ ie «3
.3
1757875
h -К
ft/a2
8-5
3
.3
| Заявка № 4718262/08 с положительным решением от 28.05 90 |
