Изобретение относится к машиностроению и может быть использовано при создании робототехнических комплексов холодной листовой штамповки
Цель изобретения - повышение производительности при работе с объектами различной формы
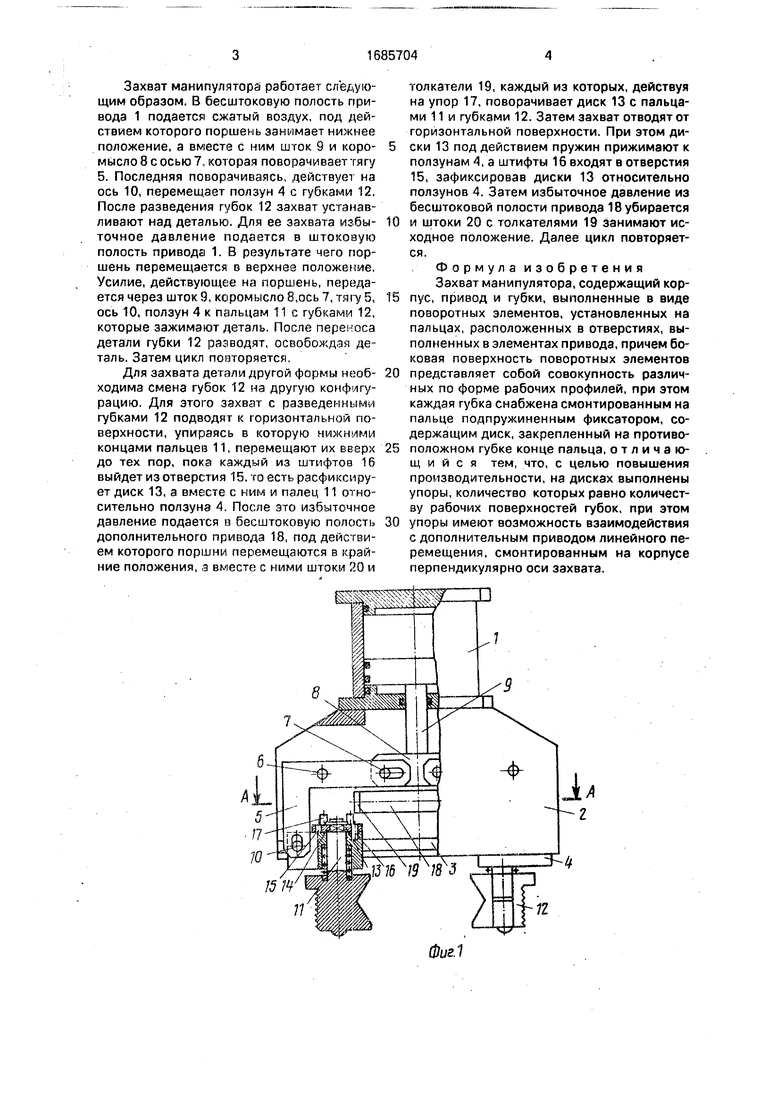
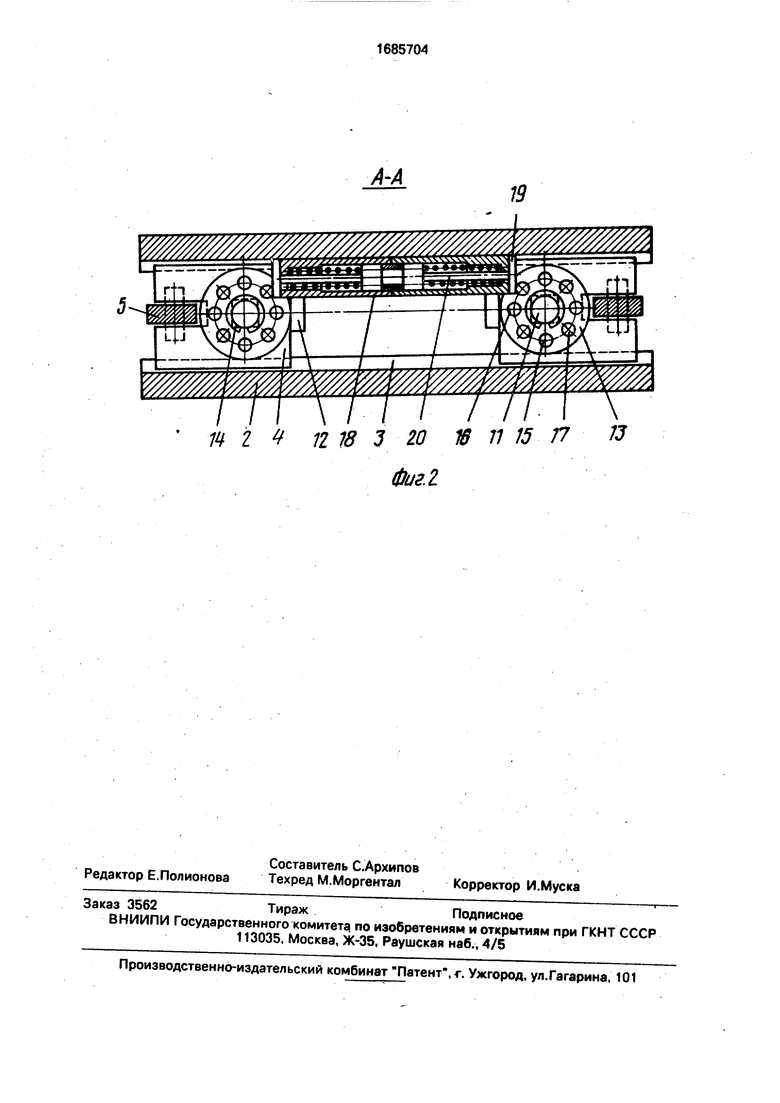
На фиг 1 показан захват общий вид, на фиг.2 - разрез по А-А на фиг 1
Захват манипулятора содержит привод 1, установленный на корпусе 2 Внутри корпуса 2 установлены направляющие 3 с возможностью перемещения по ним ползунов 4. Последние связаны с приводом 1 посредством тяги 5, которая может поворачиваться вокруг оси 6, установленной в корпусе 2.
Один конец тяги 5 связан через ось 7 с коромыслом 8 жестко установленным на штоке 9 привода 1, а другой через ось 10 -с ползуном 4 В ползуне 4 установлен палец 11, на конце которого смонтированы губки 12 различной конфигурации (губки 12 могут быть выполнены за одно целое с пальцем 11), на другом конце пальца 11 установлен диск 13, удерживаемый упорным кольцом 14 В диске 13 равномерно выполнены отверстия 15, в которые может входить итифт 16, установленный в ползуне 4 На диске 13 выполнены упоры 17. На одной из стенок корпуса 2 установлен дополнительный привод линейного перемещения 18, толкатель 19 которого смонтирован на штоке 20 с возможностью взаимодействия с упорами 17.
О 00
ел VI о
Јь
Захват манипулятора работает следующим образом. В бесштоковую полость привода 1 подается сжатый воздух, под действием которого поршень занимает нижнее положение, а вместе с ним шток 9 и коро- мысло 8 с осью 7, которая поворачивает тягу 5. Последняя поворачиваясь, действует на ось 10, перемещает ползун 4 с губками 12. После разведения губок 12 захват устанавливают над деталью. Для ее захвата избы- точное давление подается в штоковую полость привода 1. В результате чего поршень перемещается в верхнее положение. Усилие, действующее на поршень, передается через шток 9, коромысло 8,ось 7, тягу 5, ось 10, ползун 4 к пальцам 11 с губками 12, которые зажимают деталь. После переноса детали губки 12 разводят, освобождая деталь, Затем цикл повторяется.
Для захвата детали другой формы необ- ходима смена губок 12 на другую конфигурацию. Для этого захват с разведенными губками 12 подводят к горизонтальной поверхности, упираясь в которую нижними концами пальцев 11, перемещают их вверх до тех пор, пока каждый из штифтов 16 выйдет из отверстия 15, то есть расфиксиру- ет диск 13, а вместе с ним и палец 11 относительно ползуна 4. После это избыточное давление подается в бесштоковую полость дополнительного привода 18, под действием которого поршни перемещаются в крайние положения, а вместе с ними штоки 20 и
толкатели 19, каждый из которых, действуя на упор 17, поворачивает диск 13 с пальцами 11 и губками 12. Затем захват отводят от горизонтальной поверхности. При этом диски 13 под действием пружин прижимают к ползунам 4, а штифты 16 входят в отверстия 15, зафиксировав диски 13 относительно ползунов 4. Затем избыточное давление из бесштоковой полости привода 18 убирается и штоки 20 с толкателями 19 занимают исходное положение. Далее цикл повторяется.
Формула изобретения Захват манипулятора, содержащий корпус, привод и губки, выполненные в виде поворотных элементов, установленных на пальцах, расположенных в отверстиях, выполненных в элементах привода, причем боковая поверхность поворотных элементов представляет собой совокупность различных по форме рабочих профилей, при этом каждая губка снабжена смонтированным на пальце подпружиненным фиксатором, содержащим диск, закрепленный на противоположном губке конце пальца, отличающийся тем, что. с целью повышения производительности, на дисках выполнены упоры, количество которых равно количеству рабочих поверхностей губок, при этом упоры имеют возможность взаимодействия с дополнительным приводом линейного перемещения, смонтированным на корпусе перпендикулярно оси захвата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1990 |
|
SU1757875A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Устройство для подготовки радиоэлементов к монтажу | 1988 |
|
SU1704306A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Схват | 1989 |
|
SU1701516A1 |
| Запястье манипулятора | 1987 |
|
SU1433796A1 |
| ЗАХВАТ МАНИПУЛЯТОРА | 2001 |
|
RU2207246C1 |
| Устройство автоматической смены инструмента | 1987 |
|
SU1425032A1 |
| Полуавтоматический станок для совместной обработки грифа и корпуса музыкальных инструментов | 1986 |
|
SU1339016A1 |
| Клещевая головка ковочного манипулятора | 1987 |
|
SU1449229A1 |
Изобретение относится к машиностроению и может быть использовано при создании робототехнических комплексов Цель изобретения - повышение производительности Захват содержит корпус 2 привод 1, губки 12, установленные на пальцах 11 расположенных в отверстиях выполненных в ползунах 4 Боковая поверхность губок 12 представляет собой совокупность различных по форме рабочих профилей Каждая губка 12 снабжена смонтированным на пальце 11 подпружиненным фиксатором содержащим диск 13 на котором выполнены чередующиеся отверстия 15 и упоры 17 Отверстия 15 имеют возможность взаимо- деиовия со штифтом 16 установленным в ползуне 4 а упоры 17 с толкателями 19 дополнительного привода линейного перемещения 18 Смена губок осуществляется при перемещении захвата вертикально вниз до взаимодействия с горизонтальной плоскостью При этом пальцы 11 перемещаются вверх вдоль своей оси и губки 12 рэс- фиксируются После чего включается привод 18 который посредством толкателей 19 взаимодействующих с упорами 17, осуществляет поворот губок 12 2 ил (Л С
П
П 1 Ч 1118 3 20
Фиг 2
А-А
19
11 15 Л П
| Схват промышленного робота | 1986 |
|
SU1364472A1 |
